
UT04 - Recovery
Error recovery
Whenever an error occurs, SOTO notfies personell with blinking red LED light signals.

If an error occurs, the relevant error information is shown on the SOTO display. To resolve the error and continue operation, confirm the error on the screen and follow the instructions.
All SOTO error messaged are provided in a so-called "tutorial":
 |
|
Common errors and recovery routines
The main errors and error recovery tutorials are:
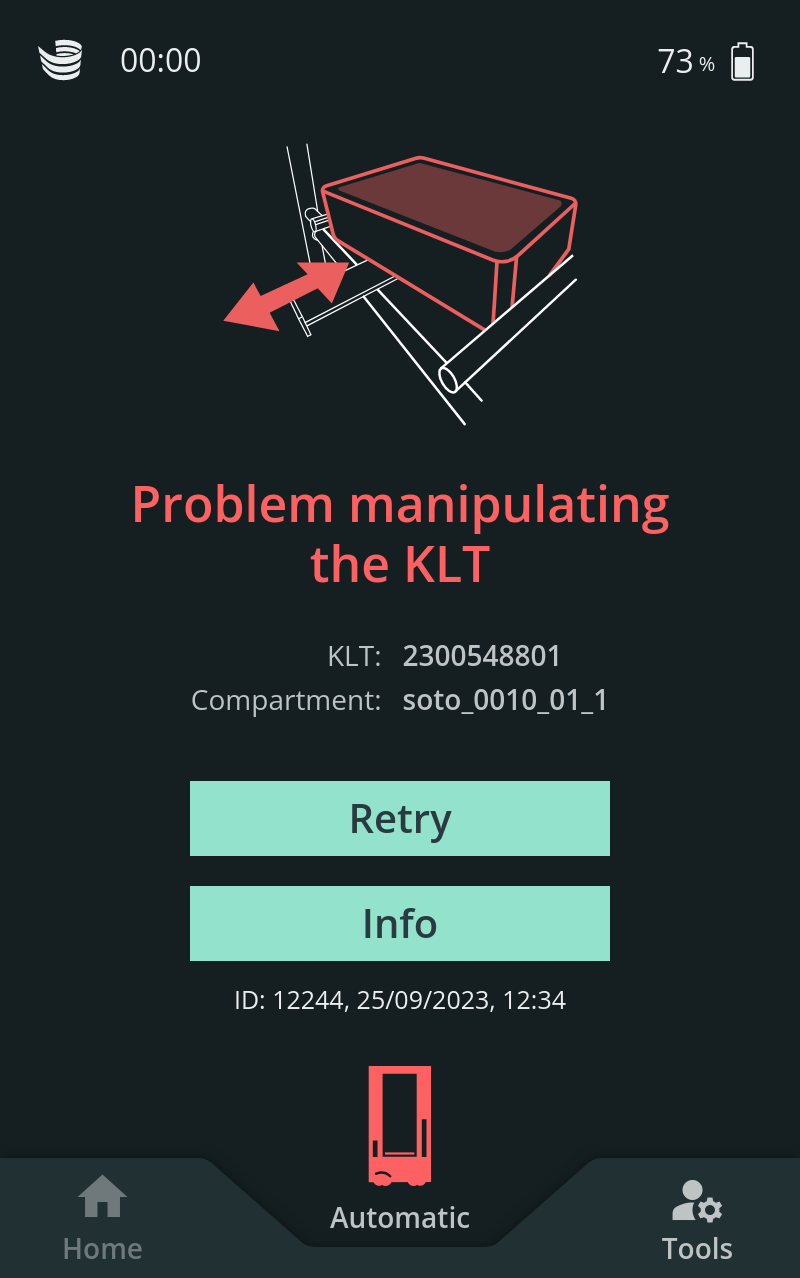
Blocked with item in gripper | Reason: The load carrier on the gripper is not in the right position. Solution: Position it correctly and try again. | 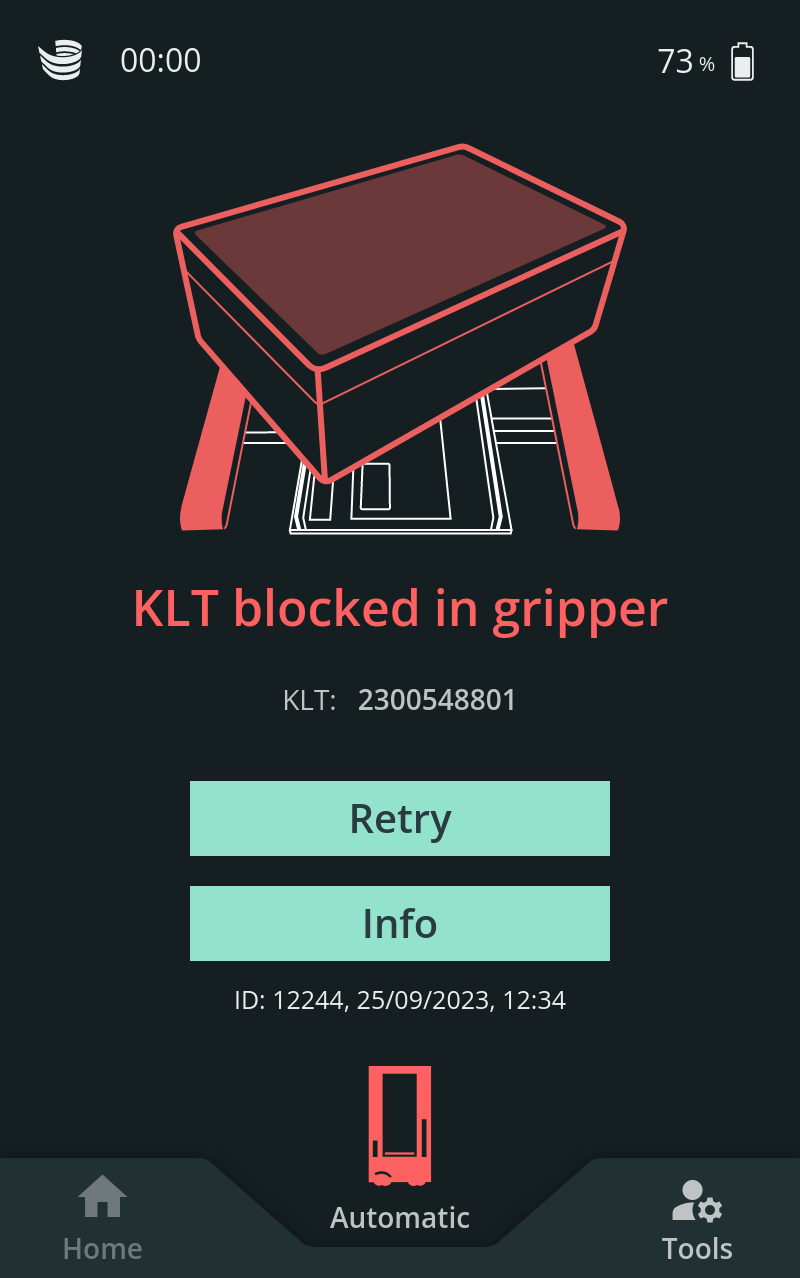 |
Robot delocalized | Reason: SOTO has lost localization. Solution: Manually drive the robot to the charger. The robot will try to relocalize. Try again. | 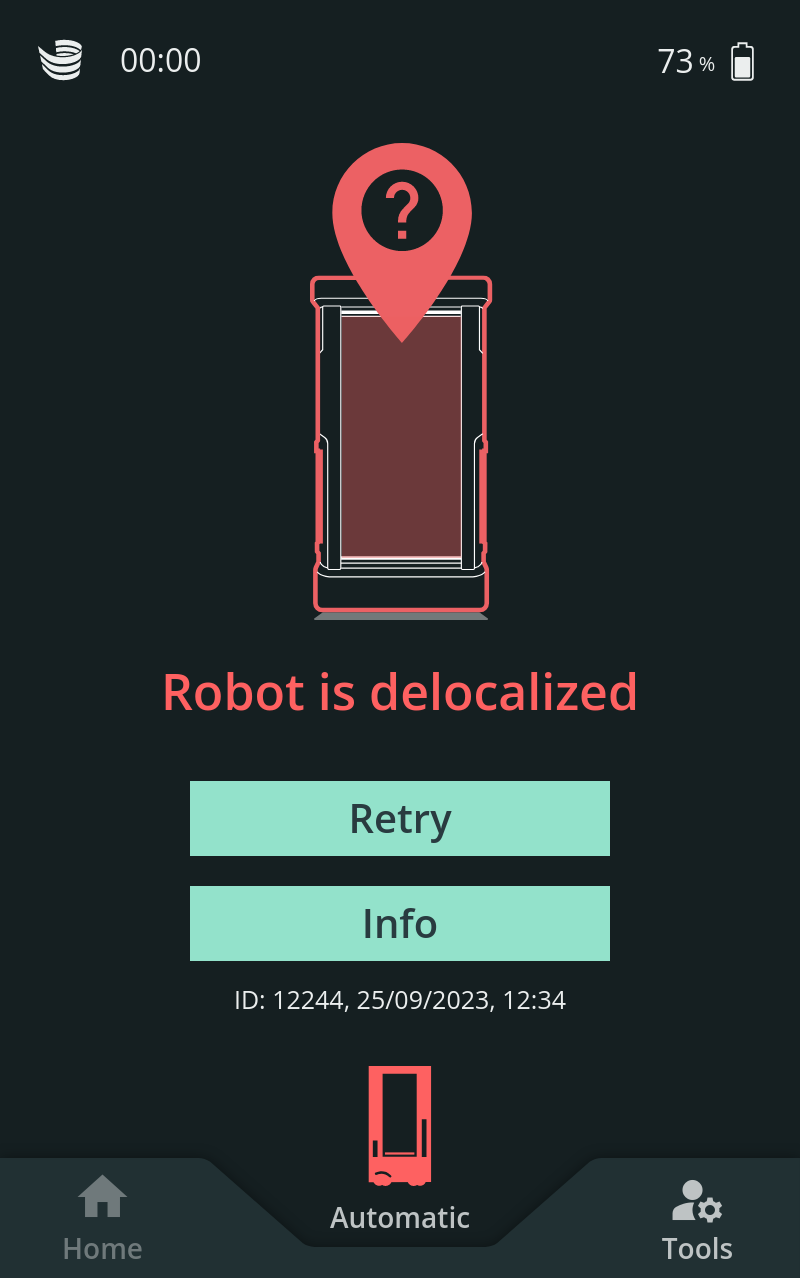 |
Gripper violates light curtain | Reason: The gripper is sticking out of the robot and is violating the light curtain. Solution: Press the emergency button. Push the gripper back into the robot. Ensure the load carrier remains on the gripper; do not remove it. Release the emergency stop button, confirm the error on the display and press the "Retry" button. Important: The distance between the two roller conveyors must remain the same and the load carrier must be positioned in the center of the gripper. | 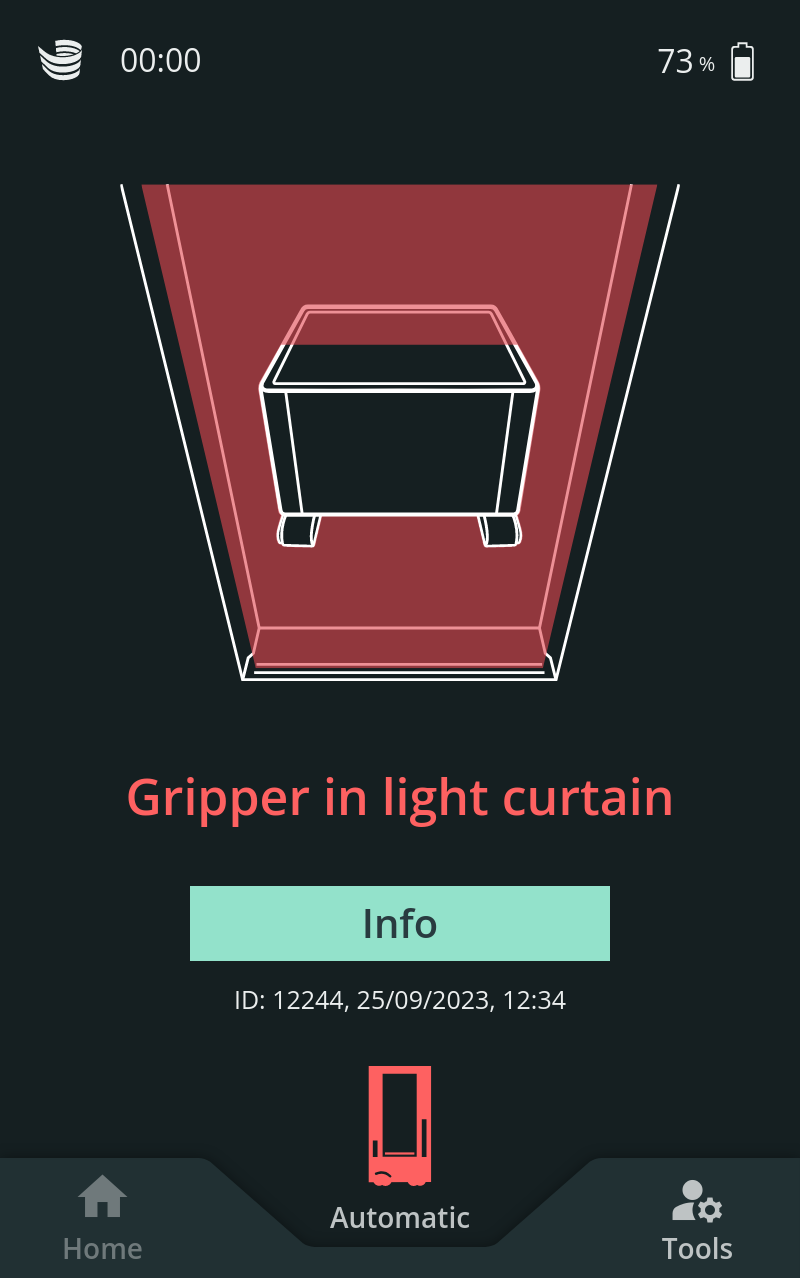 |
Overcurrent | Reason: The gripper collided with other parts of the robot. Solution:
Important: The distance between the two roller conveyors must remain the same and the load carrier must be positioned in the center of the gripper. | 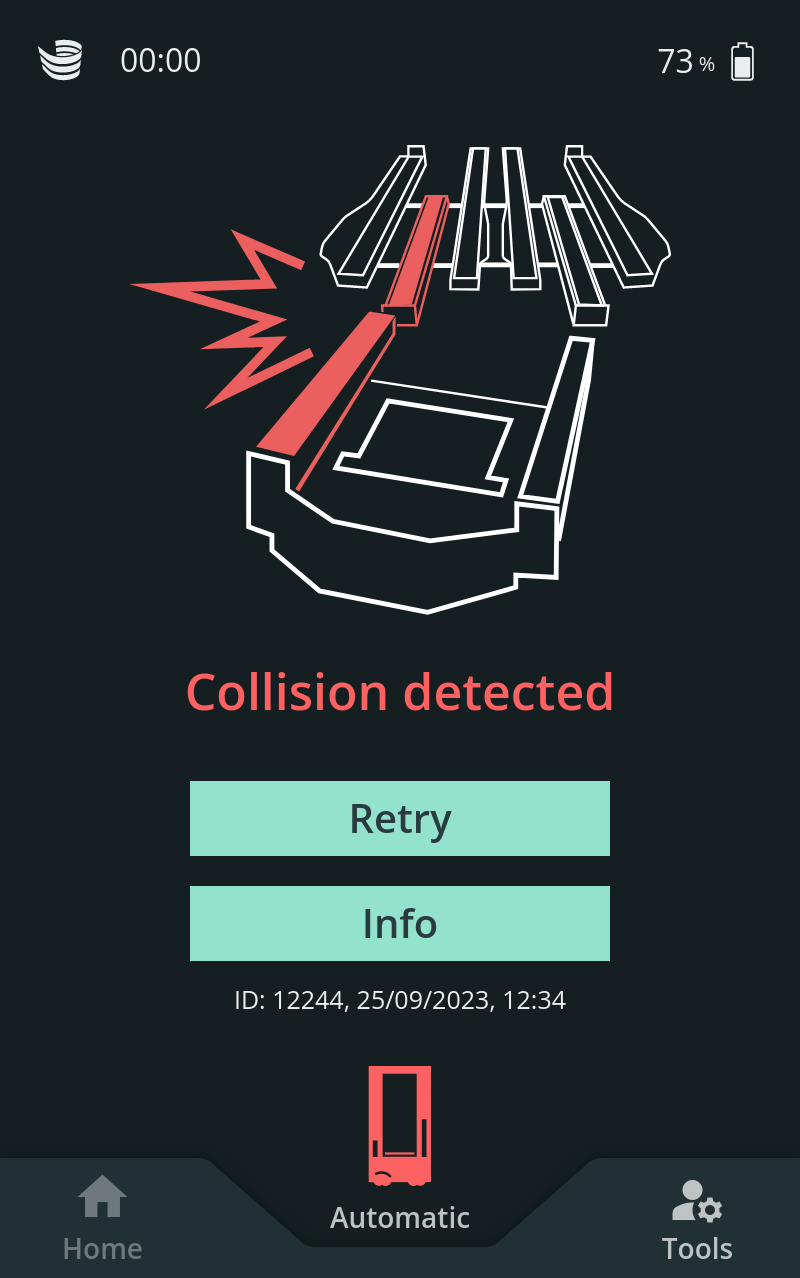 |
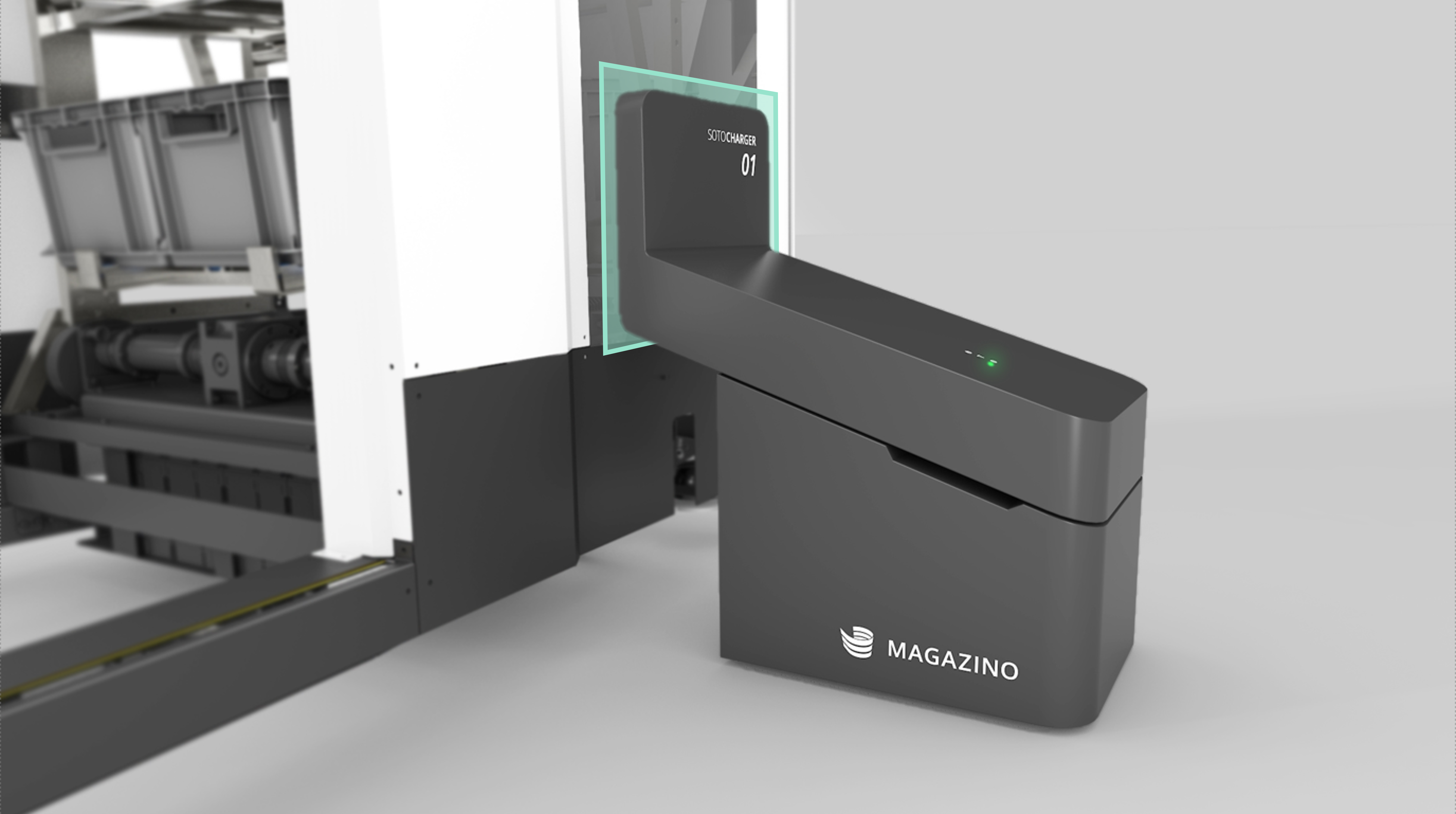
Charger not working | Reason: The robot is not receiving power. Solution: Unplug the charging cable and wait 10 seconds. Plug it back in, confirm on screen and try again. | 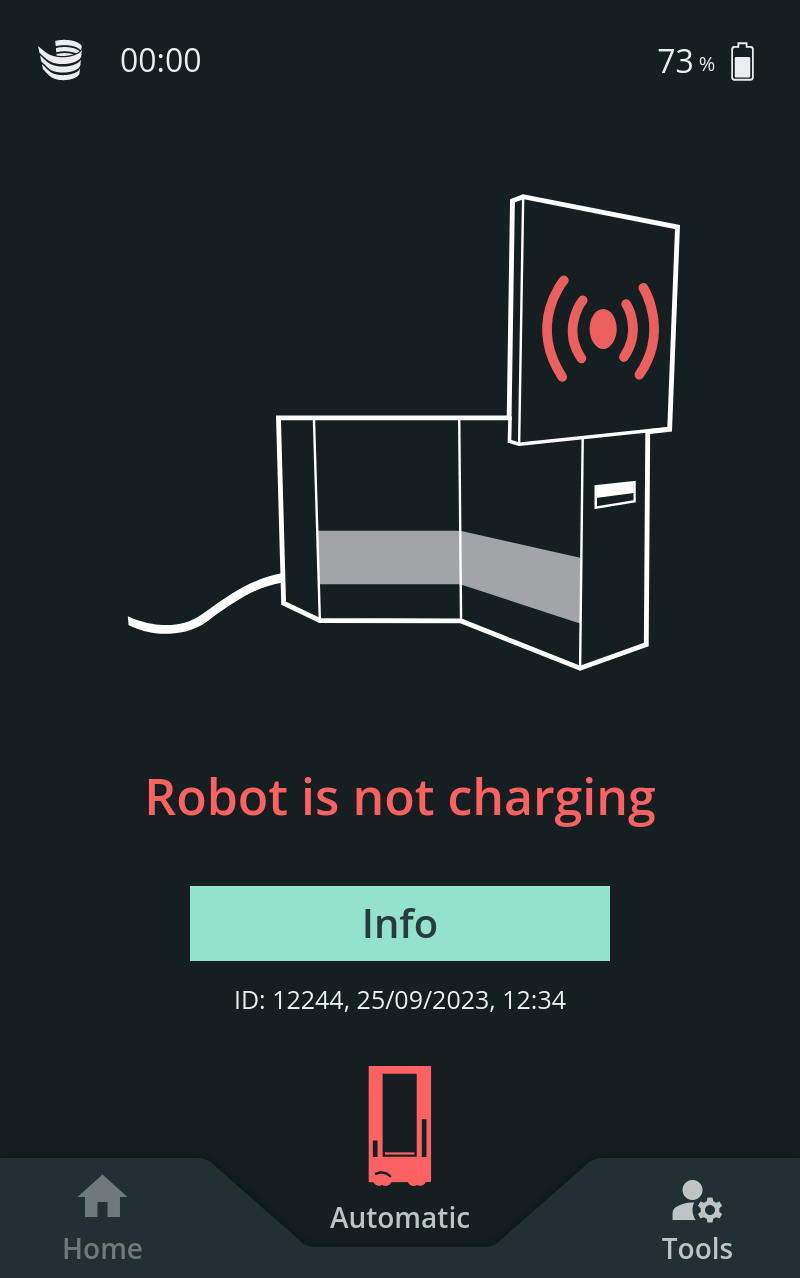 |
Docking failed | Reason: The robot is unable to dock to the handover station. This may be due to an obstacle obstructing the front of the shelf or the robot did not recognize the docking shape. Solution: Remove all obstacles in front of the handover station and check whether the docking shape is correctly positioned or damaged. | 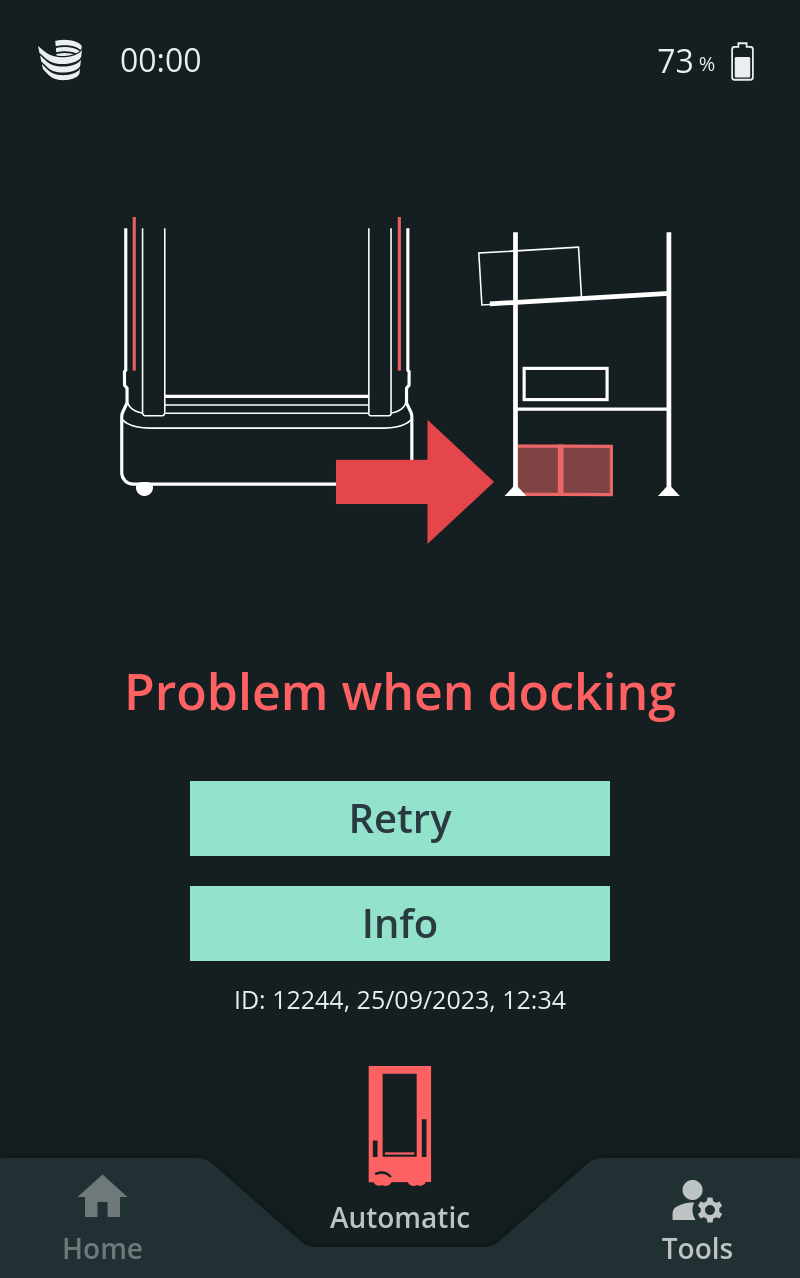 |
Adapter not recognized | Reason: The compartment's adapter was not recognized. This issue commonly appears due to damaged or missing components. Solution: Check that the adapter includes all necessary details, such as the QR code and reflective sticker. Confirm that the name of the compartment corresponds with the name provided in the instructions. Then press “Retry”. | 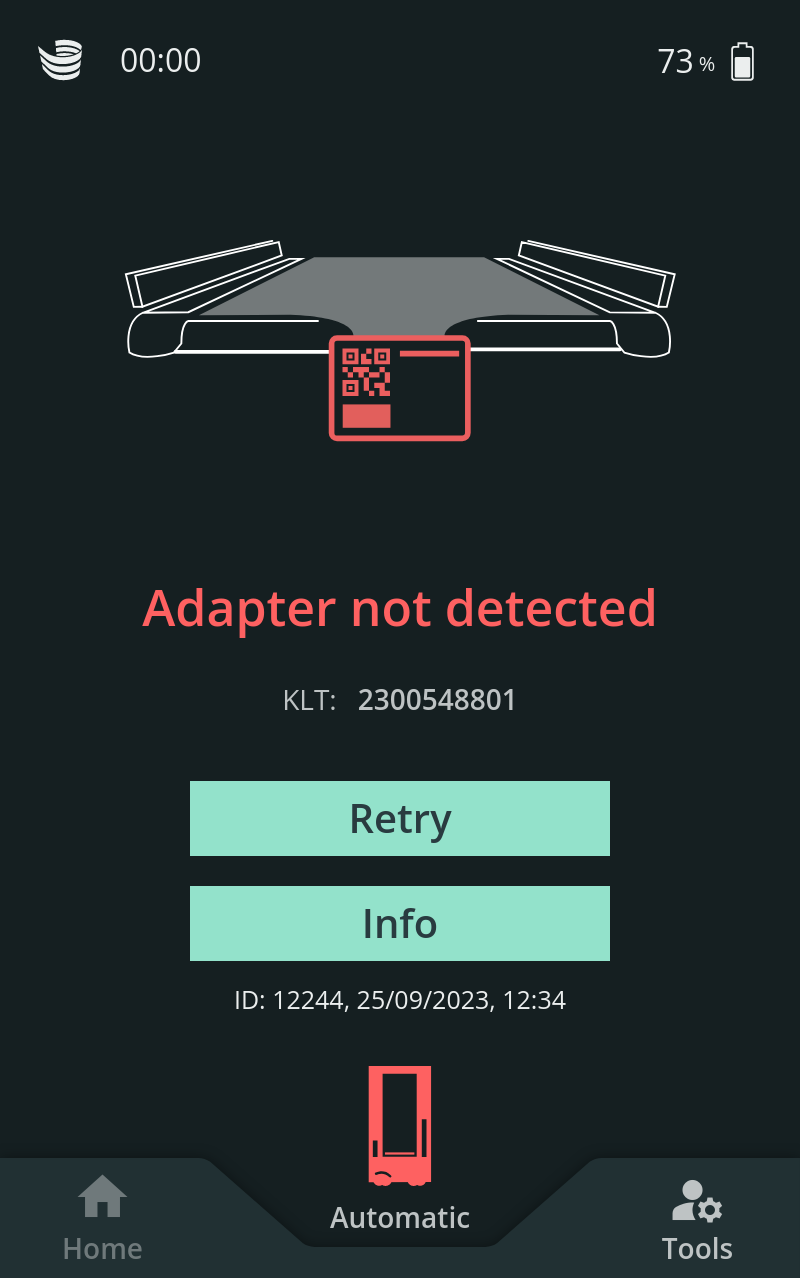 |
Compartment not reachable | Reason: The space in the compartment is probably blocked. Solution: Make sure that there are no objects blocking the space in the compartment. Then press “Retry”. | 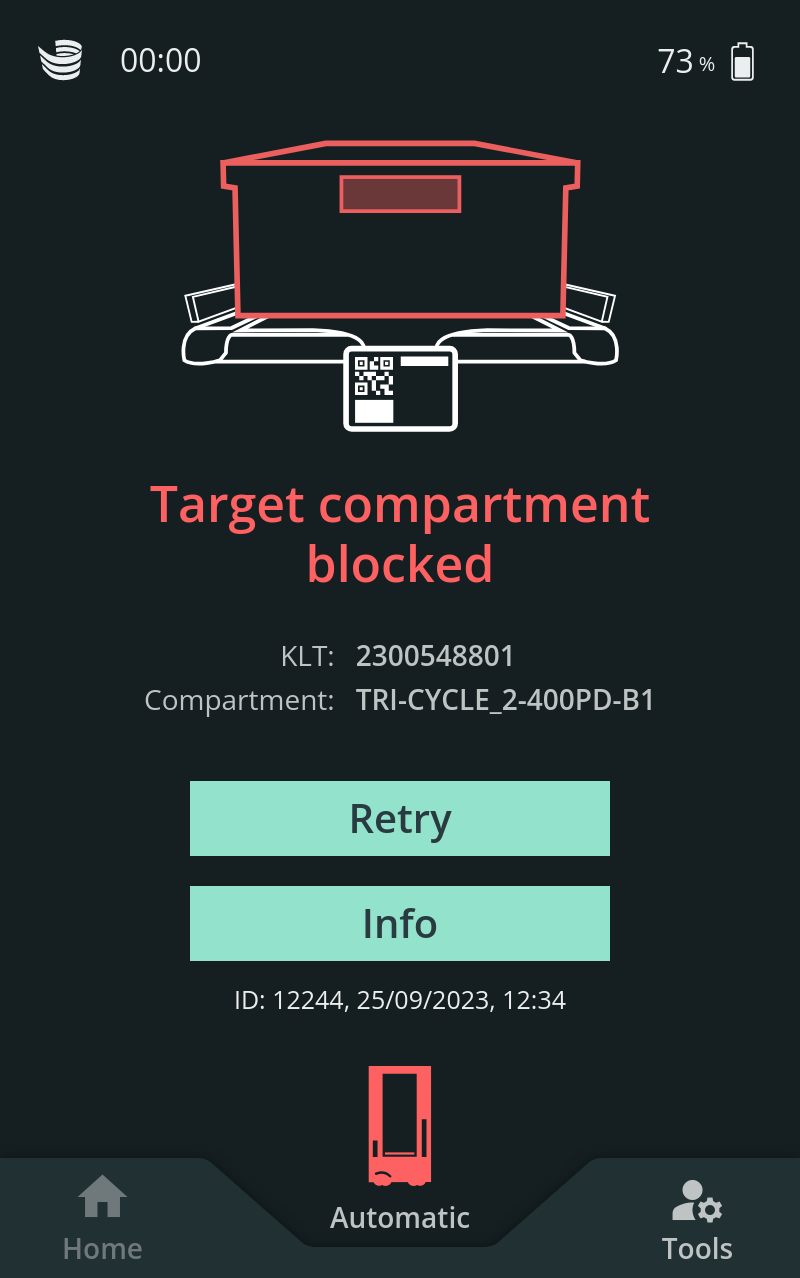 |
Load carrier not found | Reason: The designated load carrier is either not located where the robot expects it to be, or the load carrier's label is unreadable. Solution: Check the location of the load carrier and position it correctly. Ensure that the barcode is clearly visible. Then press “Retry”. | 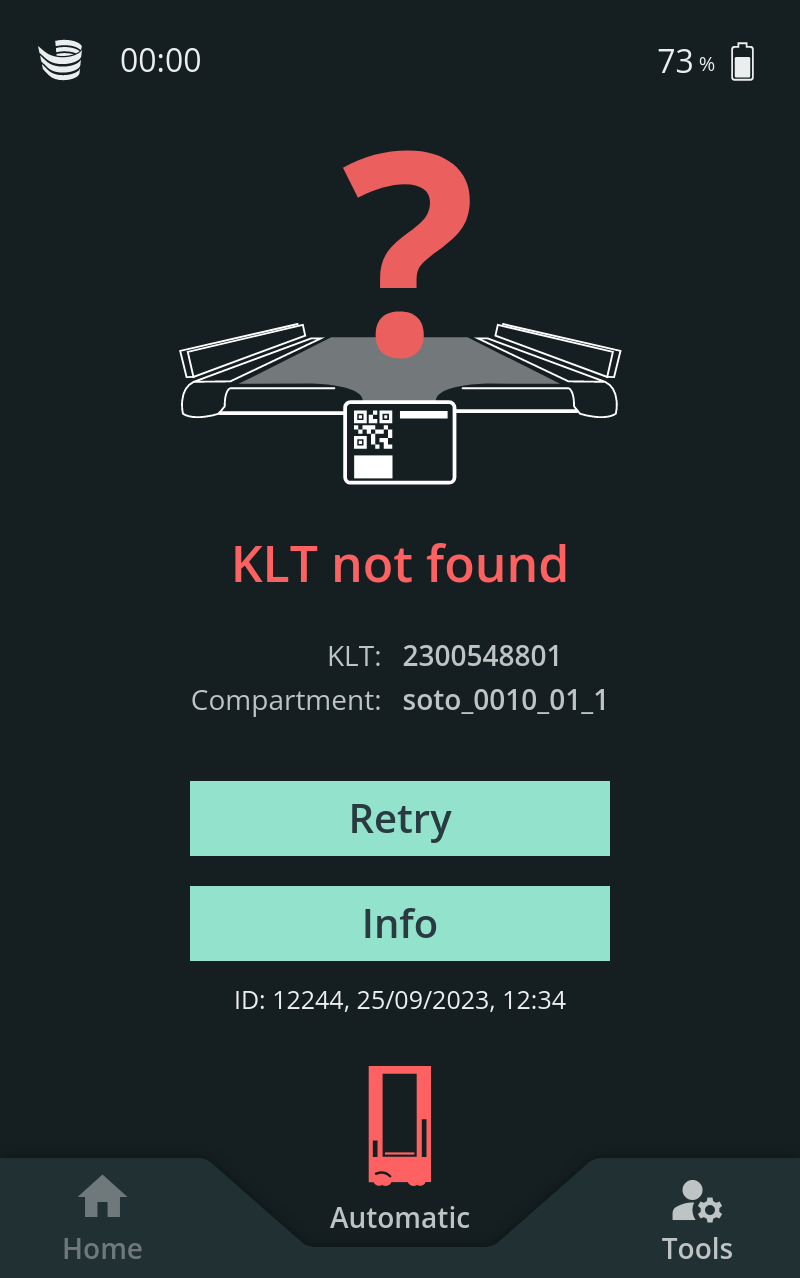 |
Load carrier not found on gripper | Reason: The load carrier may have been removed manually during load handling. Solution: Check the location of the load carrier on the gripper and position it correctly. Then press “Retry”. | 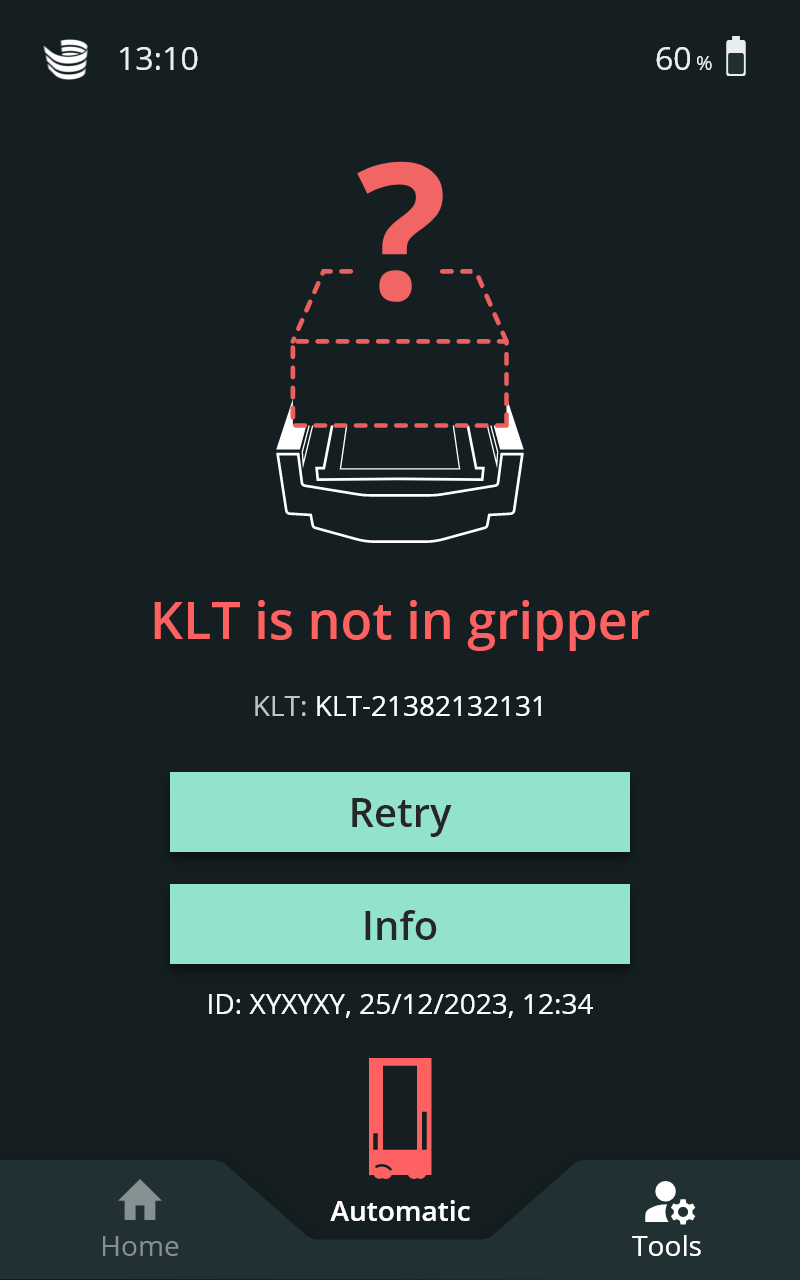 |
Item unreachable | Reason: The gripper is unable to grasp the load carrier. Solution: Check that the load carrier is correctly inserted in the compartment. Reposition or rotate it if not placed correctly. Then press “Retry”. | |
Item no graspable | Reason: The gripper is unable to grasp the load carrier. Solution: Check that the load carrier is correctly inserted in the compartment. Reposition or rotate it if it is not placed correctly. Then press “Retry”. | 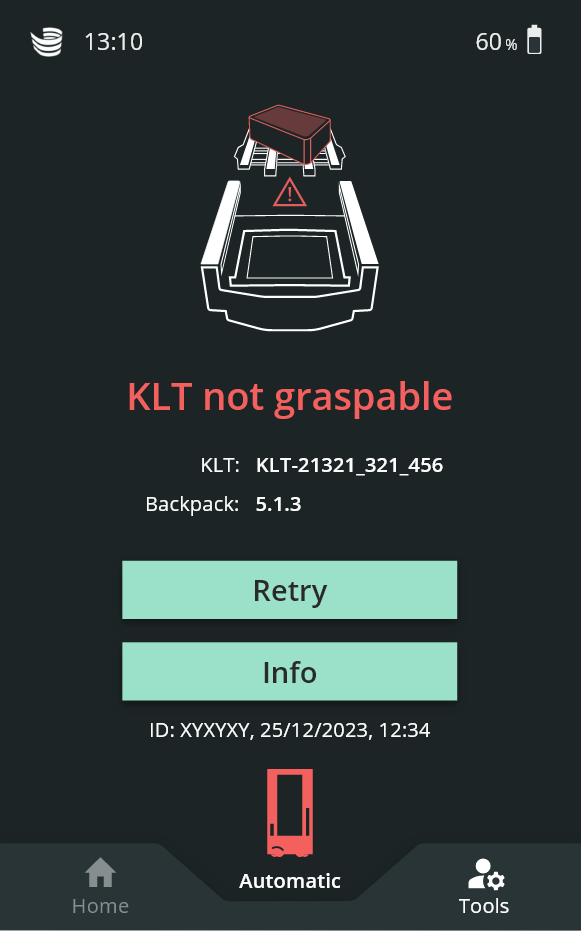 |
Path to target blocked | Reason: An obstacle is blocking the path of the robot. Solution: Remove the obstacle. The robot will continue driving automatically. | 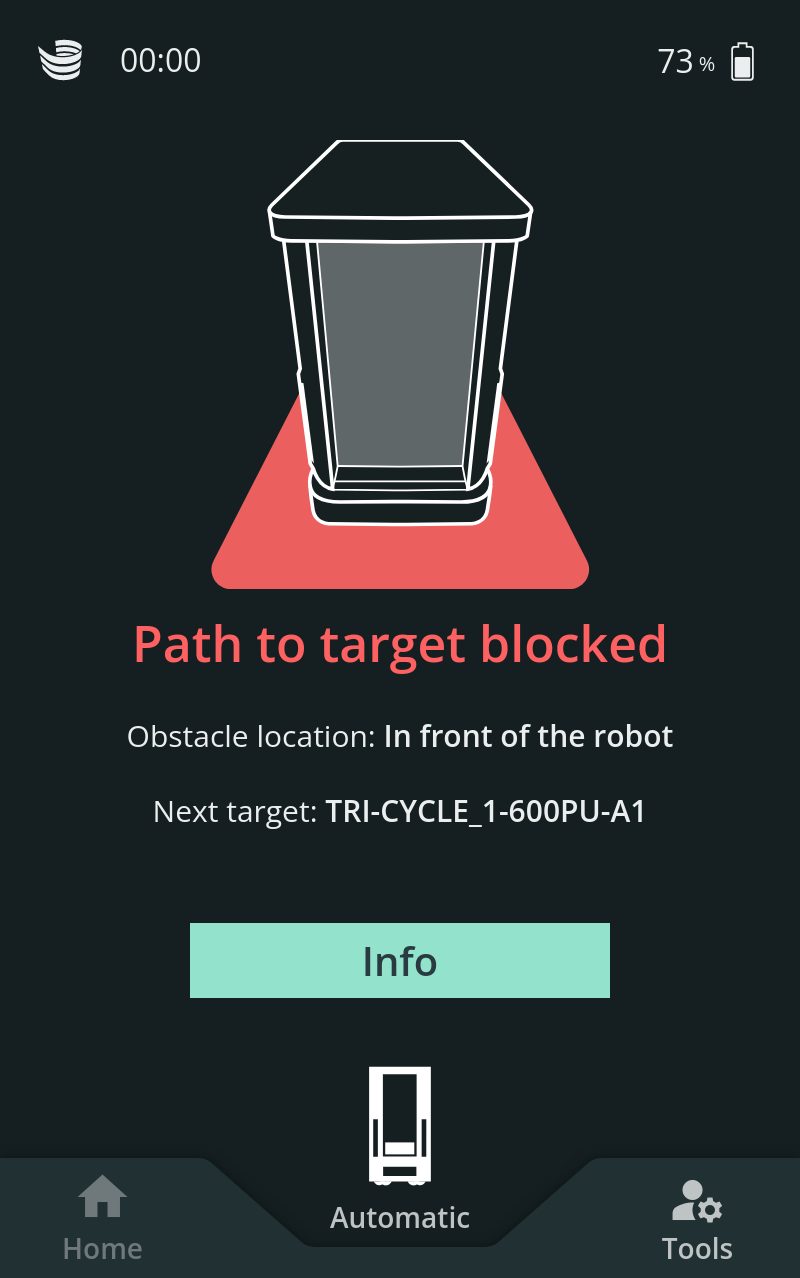 |
Top laser retracted | Reason: The top laser scanner is retracted and cannot be used. Solution: Unfold the top laser scanner above the gripper. | 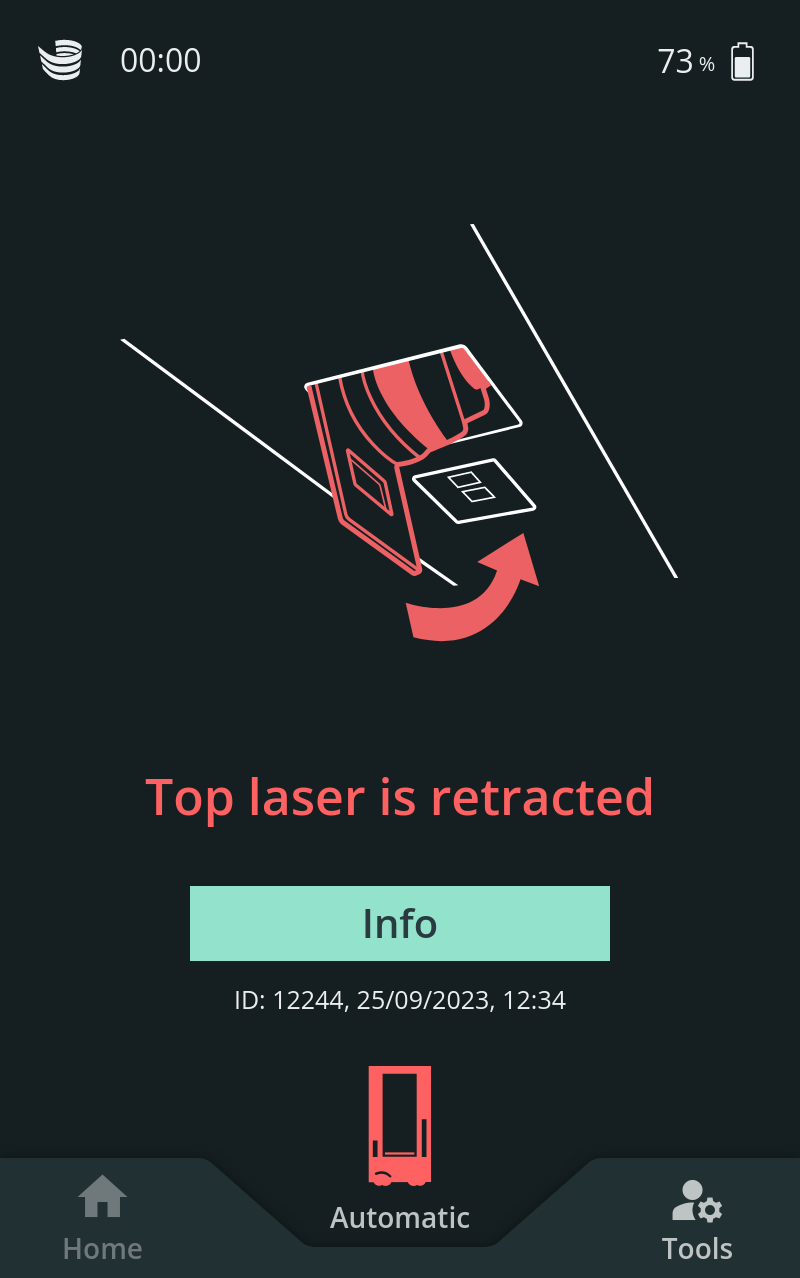 |
Robot inoperable | Reason: The emergency button was pressed and/or the light curtain was triggered. Solution: Clear any objects interfering with the light curtains and confirm on the display. Then release all emergency buttons and press the release button. | 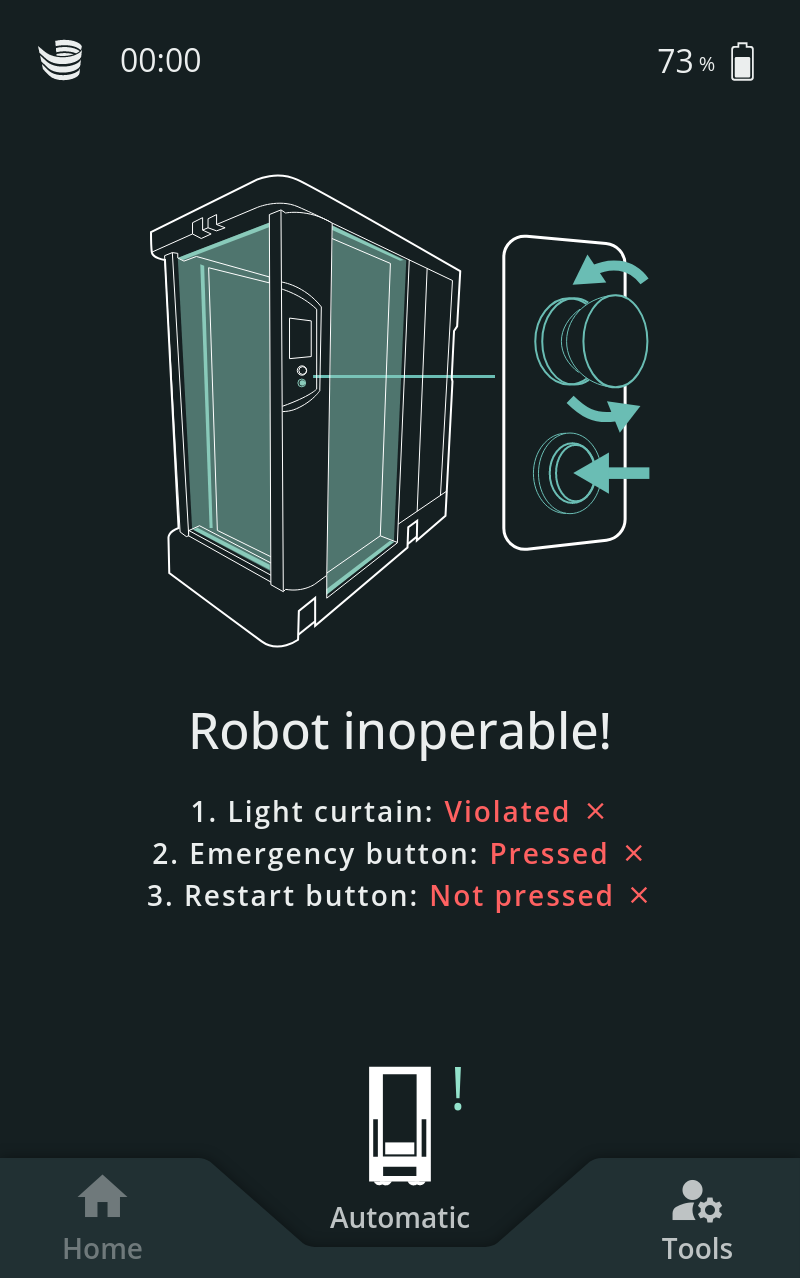 |
Robot overheating | Reason: The robot has reached critical temperature and needs to cool down. Solution: The robot is out of operation. Navigate to the “Tools” section to contact support. Important: Operating the robot outside of its temperature specification can result in damage to the system. | 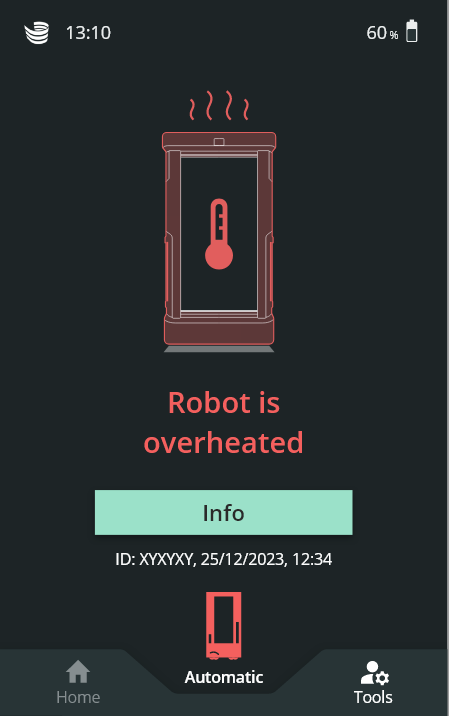 |
Internal error | Reason: Unknown software issue. Solution: Follow the on-screen instructions and press “Retry” or navigate to the “Tools” section to contact support. | .png?inst-v=623fd237-c9af-448b-8290-279da381d7b9) |
Hardware Error (Software restart) | Reason: Unknown hardware issue. Solution: Try to restart the software. If the error persists, restart the robot in the “Tools” section. |  |
Hardware Error (Robot restart) | Reason: Unknown hardware issue. Solution: Try to restart the robot.
If the error persists, navigate to the “Tools” section to contact support. |  |
System error | Reason: The robot has encountered a system error. Solution: Try to restart the system. If the error persists, navigate to the “Tools” section to contact support. |  |
Access management
Access to advanced error recovery tools, robot settings and robot commissioning functions is restricted.
Pin
Enter your PIN in order to access advanced error recovery tools and change robot modes.
Make sure the pin is known only to authorized personnel.
General SOTO Display tools
SOTO also provides an optional set of tools that can be used to recover the robot.
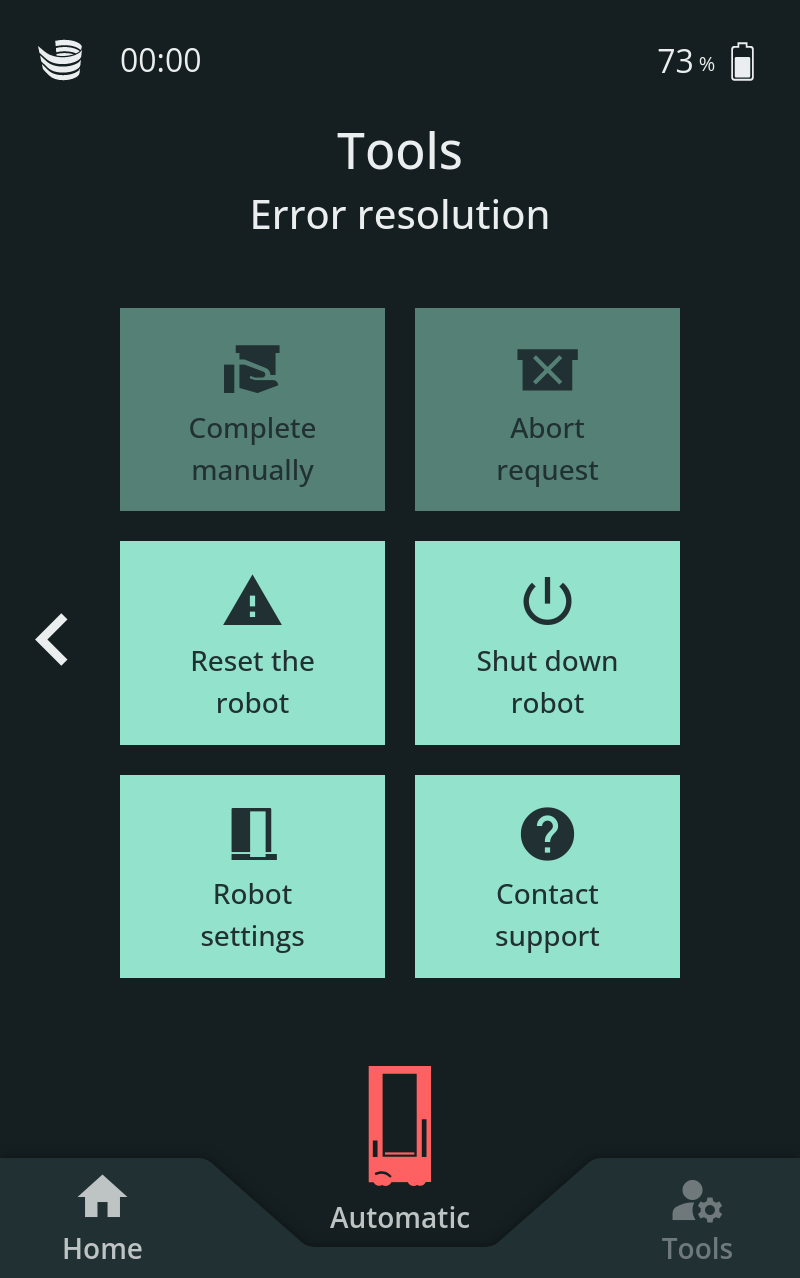
Tools
You can access the tools section by pressing the “Tools” button located at the bottom right-hand corner of the SOTO display.
Some of the tools are only available if the robot has an active order and an active error.
If no order or error is present the unavailable tools are faded out.
Manual transport request override
There is also an option to override an active request to resolve an issue:
Complete manually | The current request is completed manually. The user must bring the load carrier to the target compartment manually. Refer to the information given on the SOTO display to identify the target compartment. | 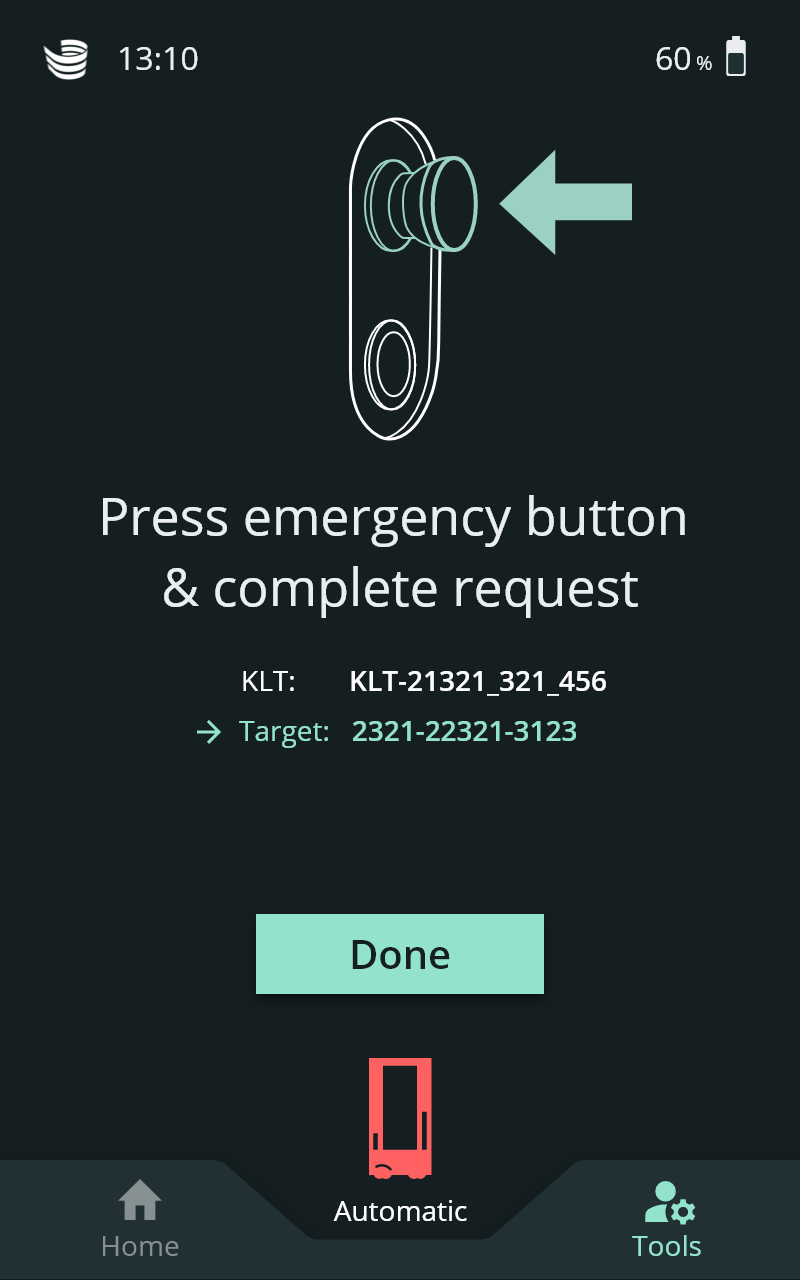 |
Abort manually | The current request is aborted manually. | 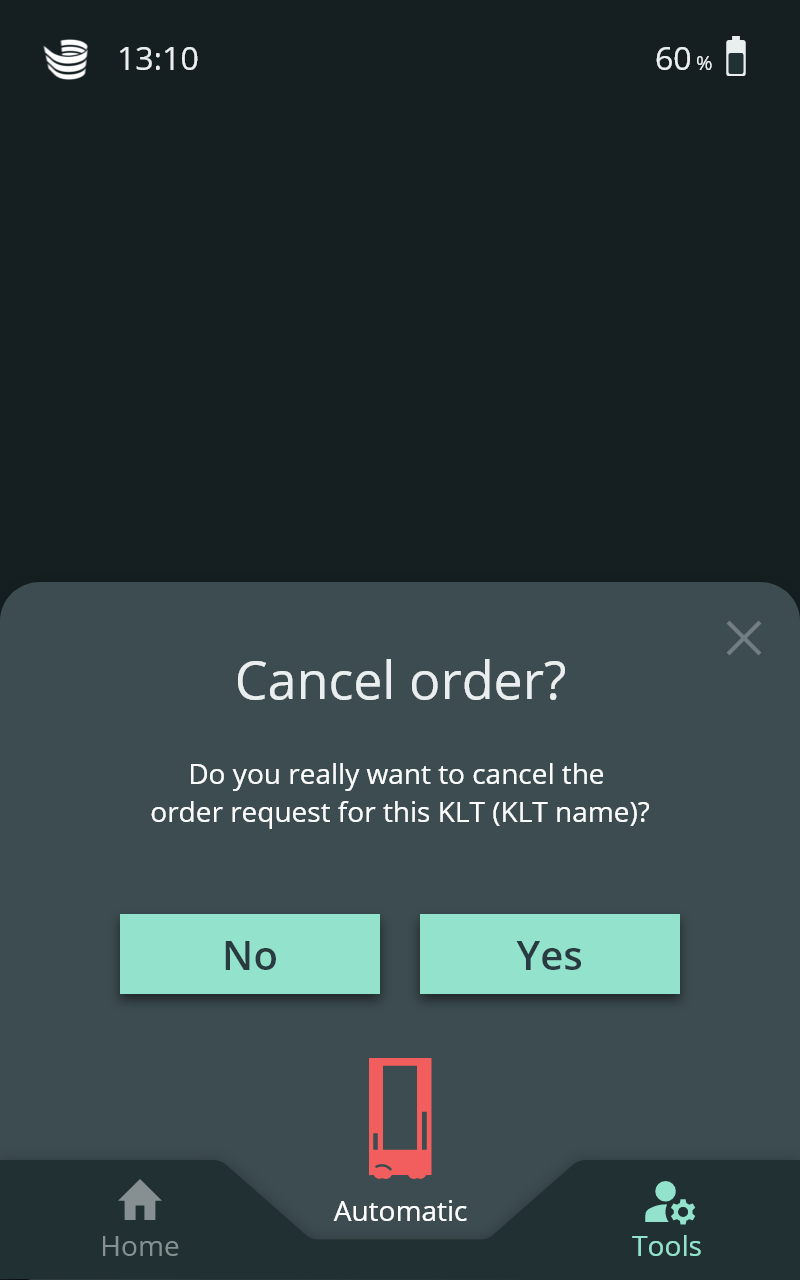 |
System reset
If all recovery attempts fail, there is an option to reset the system. This action will clear all active errors and orders. Resetting can be done in two ways:
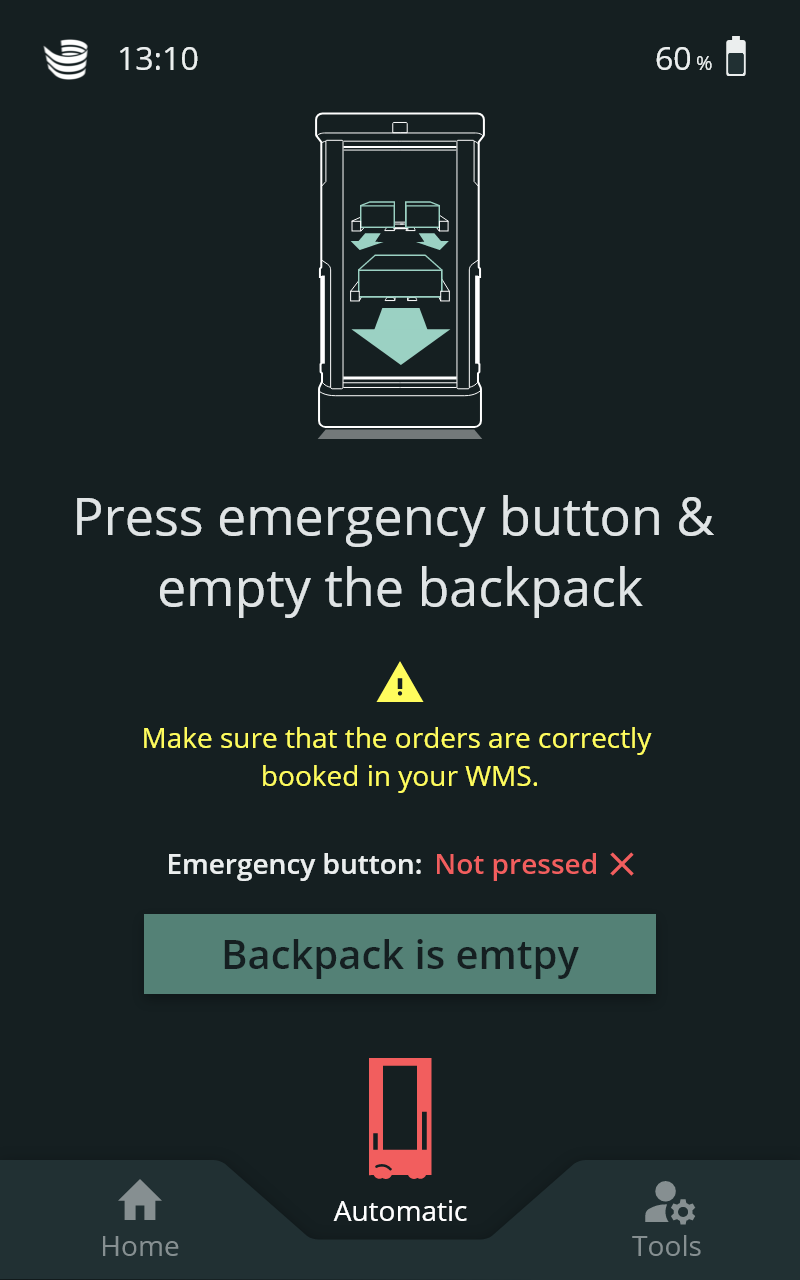 | The robot deletes all its orders and all critical events are automatically acknowledged. The user must remove all load carriers from the backpack manually. Please make sure to resolve any potential conflicts with the WMS transport jobs! | Reset the robot |
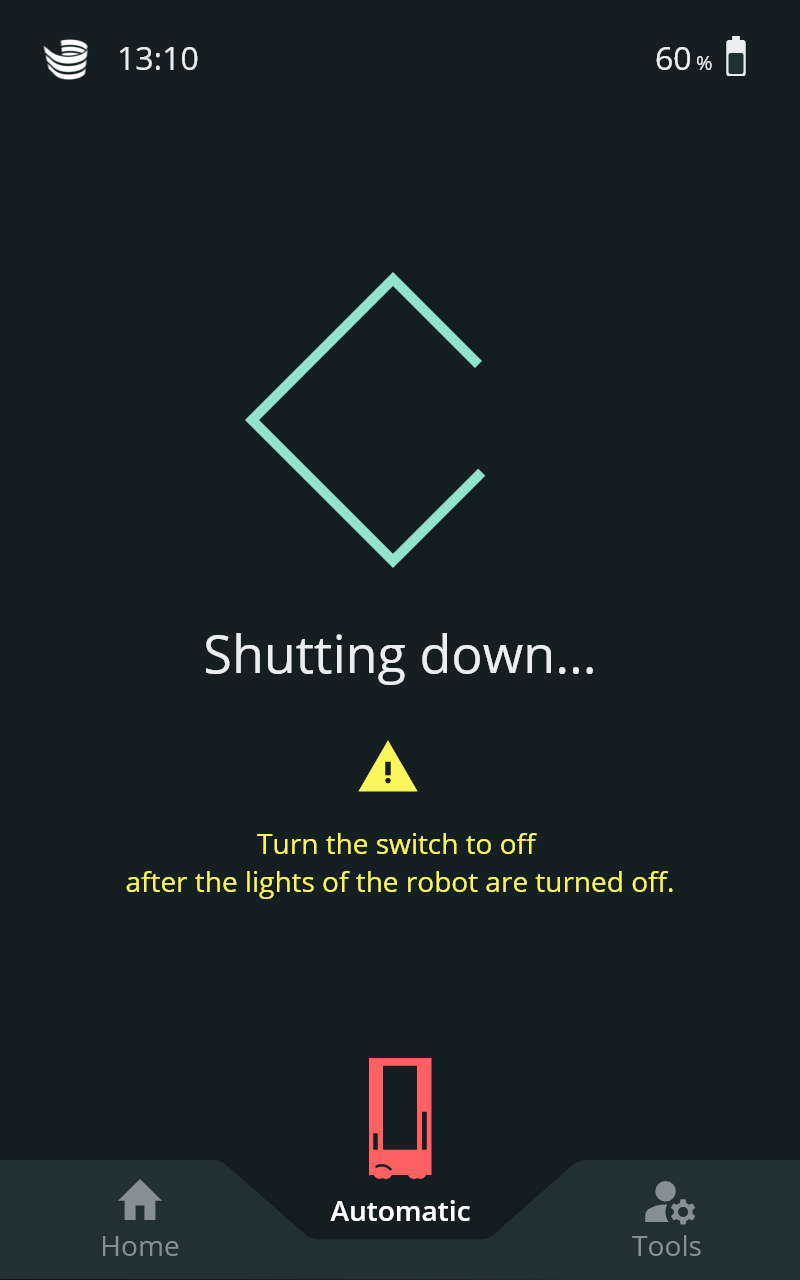 | The robot is completely switched off. Please turn the “On/Off” switch when the robot is completely switched off (LEDs and SOTO display are turned off). Please wait 10 seconds before turning SOTO back on. | Shut down robot |
Robot settings
The robot settings section shows all important information about the robot, its software components and their status.
Name and model
Software versions
Active environment
Connection status
You can change the system language in robot settings if required.
Sensor field tracing
If a safety field is triggered and the cause is not immediately clear, the SOTO display provides further help.
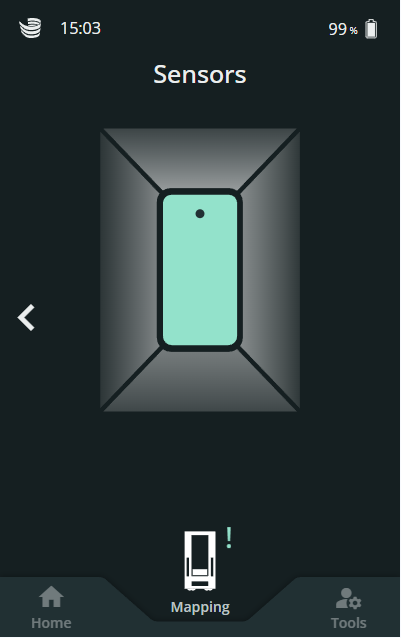 | The display shows the status of each small safety field. As soon as one or more of the small safety fields are violated, the respective field is highlighted in yellow. | Sensors |
Re-localization
In some cases, SOTO might not recognize its precise location within the building due to a loss of localization. If this occurs, manual re-localization is required. This can be done by manually driving the robot back to its charger. Once back at the charger, the robot will automatically re-localize and resolve the error.
Re-localization is often required when switching from manual or mapping mode to automatic mode.
Moving the robot in manual mode
SOTO can be driven manually by switching the robot into manual mode.
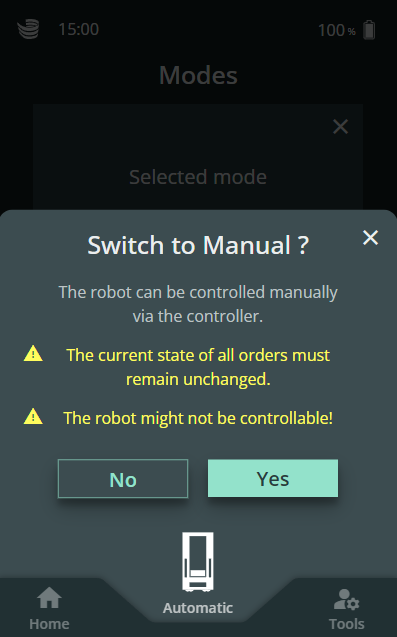
To switch operating modes, click on the mode select button in the bottom center of the display (large SOTO icon).
If there are still active orders inside the backpack, please do not change the state and position of the load carriers.
SOTO can be operated using a handheld controller. The controller is stored in a bracket in the rear panel of the drivebase.
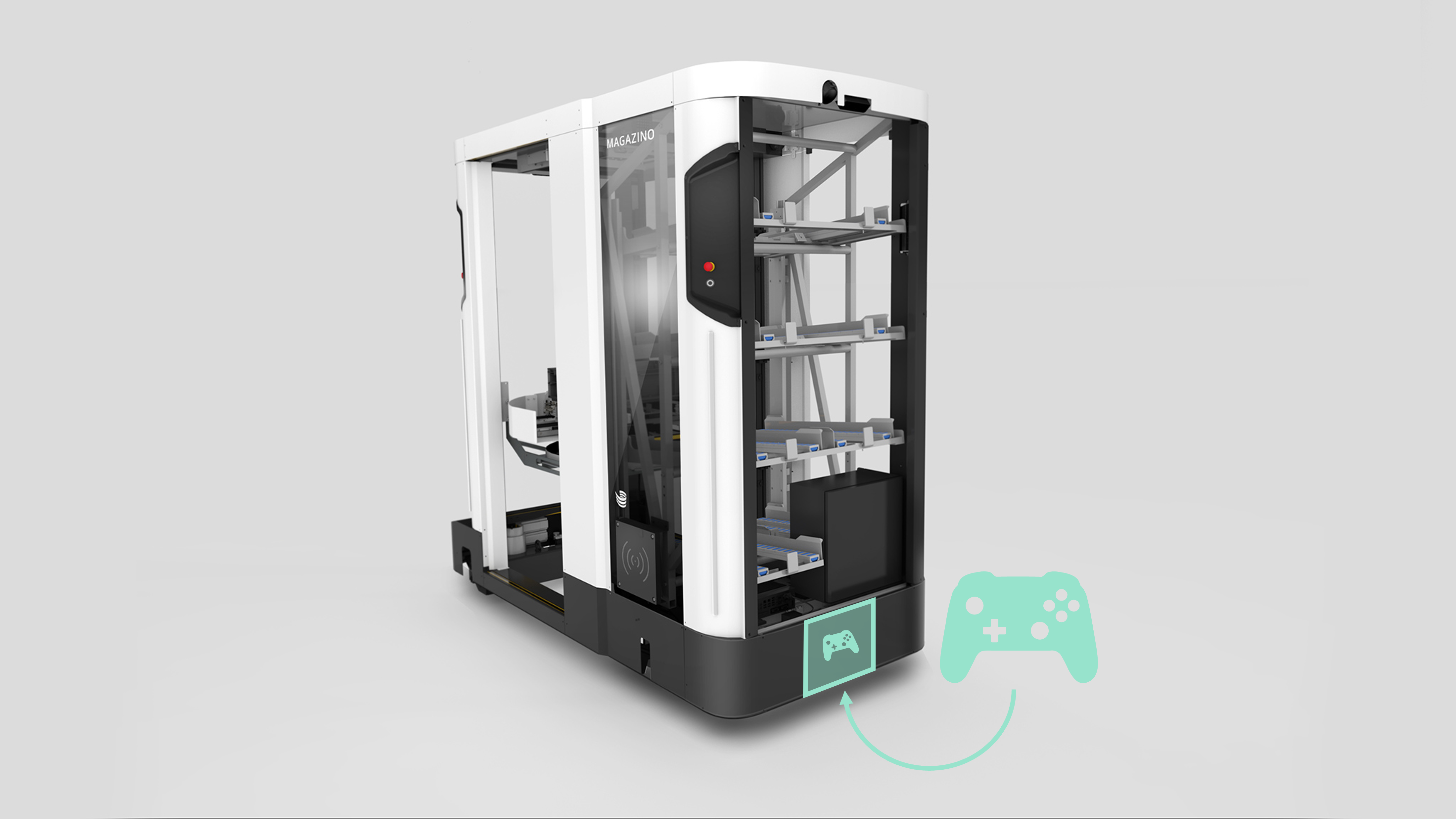
Once you have retrieved the controller from its bracket it has to be connected to SOTO. The connection can be initiated using the 'Start' button on the controller. If the connection was successful, a green controller symbol will appear in the header of the SOTO display.

The robot can now be controlled by the handheld controller. Navigate the robot to its intended target position.
The maximum speed of the robot is set to 0.3 m/s by default.
Button | Function |
Start | Initiates the connection with SOTO (condition USB-Dongle connected) |
Left joystick | Translation control, moves the robot in X and Y direction without changing its orientation |
Right joystick | Rotation control, changes the orientation of the robot by rotating around its center |
LB | Reduced speed, the robot reduces its speed to 0.05 m/s |
RB | Maximum speed, the robot accelerates to 1.5 m/s |
Mode | Has to be disabled, LED off |
XID/HID Switch | D-X-toggle switch on front-end of the gamepad, has to be set to X |
Always use reduced speed when moving the robot close to obstacles that are not detected by the laser scanners — especially the charger.
The safety sensors remain active in manual mode. The robot automatically reduces its speed if the safety fields are violated by nearby obstacles. Keep in mind that the bottom laser scanners only detect obstacles at 0.12 m height.
After maneuvering the robot to the required location, disconnect the controller and return it to its bracket. Upon returning the controller, make sure it securely snaps back into the bracket.
Then, to resume normal operations, switch SOTO back into automatic mode.