
UT01 - SOTO introduction
Overview
Until now, production logistics have been carried out almost exclusively manually. Driverless transport systems have driven automation forward. SOTO goes one step further and brings materials directly to the assembly line, just-in-time and at different heights directly to the target compartment — completely autonomously. The initial setup is user-friendly and can be set up largely independently.

SOTO works up to 20 hours per day and enables processes that are not only more efficient but also significantly more cost-effective. Its operation is deliberately simple and enables parallel operation with humans. The hardware is extremely robust and designed for maximum reliability.
Material flow automation with SOTO not only adapts to the environment, but also to increasing demand. New robots can be integrated directly without major effort.
SOTO delivers a complete intralogistics solution. The SOTO fleet closes the gap between automated small parts warehouses and an automated production line.
With its high intelligence, SOTO is able to perform complex transport tasks independently, reacting to changes in the environment and changing demand. It can completely replace tugger trains or also cooperate with them in a meaningful way.
Each SOTO picks and transports goods packed in standardised small load carrier boxes between flow racks and automated small parts warehouses.

SOTO typically transports between 20 to 45 load carriers per hour in a standard operating environment, ensuring timely and precise delivery of materials to the required locations.
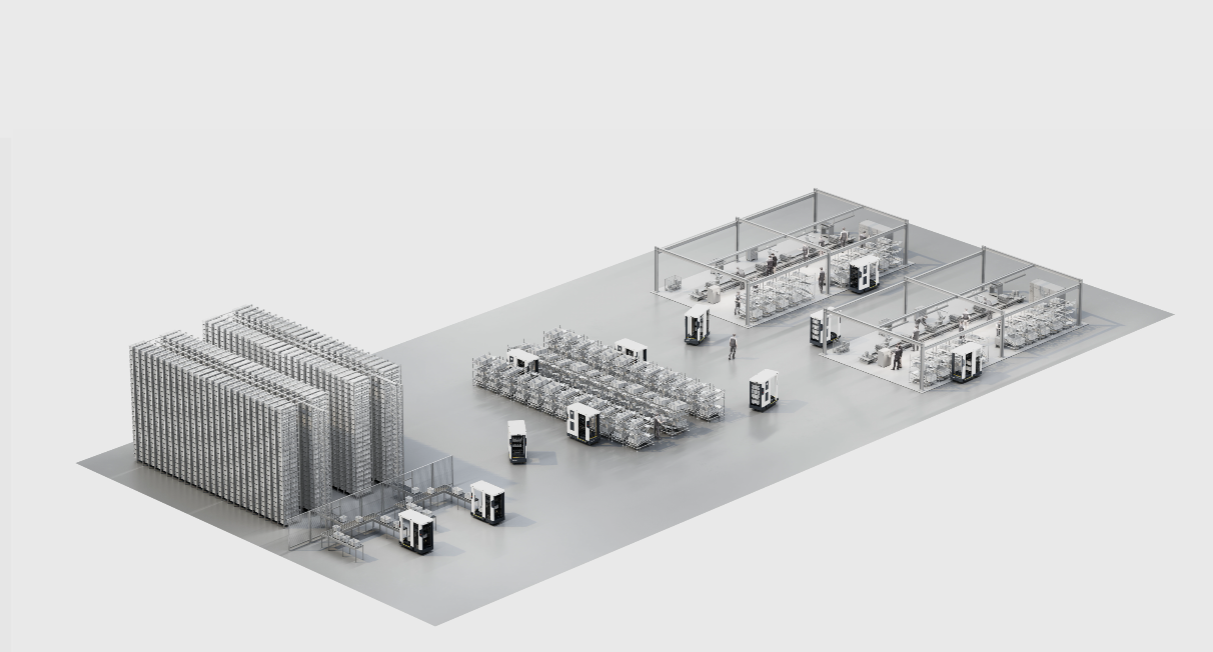
In an industrial manufacturing setting, the supply process involving SOTO could look as follows:
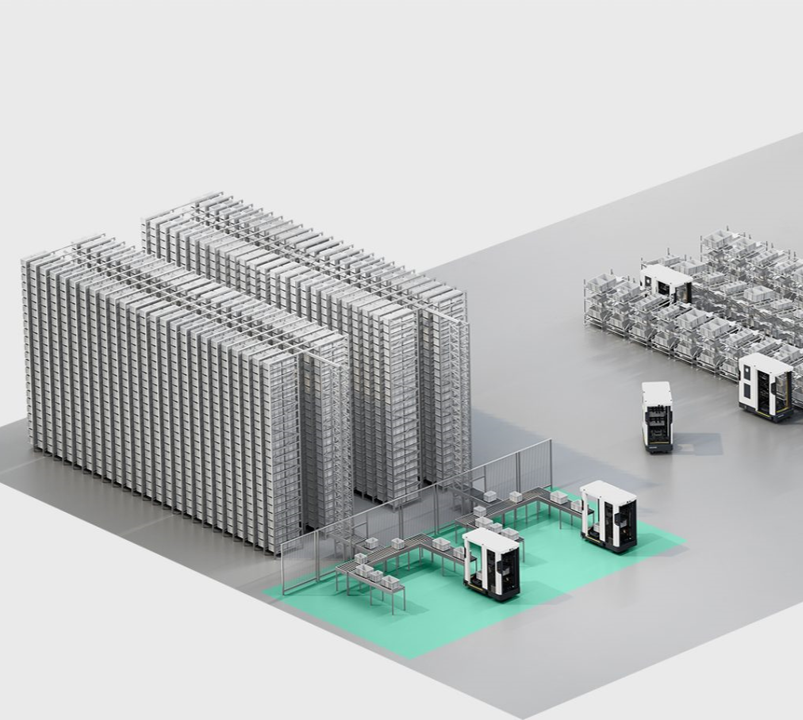
Automated small parts warehouse
SOTO picks up boxes directly from the conveyor of the automated small parts warehouse. The transport order for this comes from the ERP system. Empty boxes can be returned the same way.
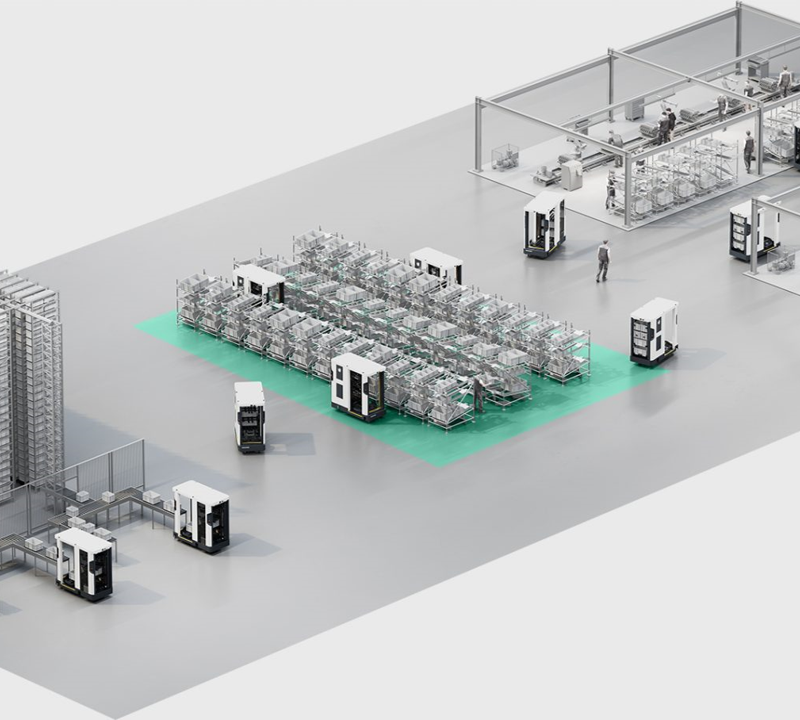
Supermarkets
SOTO takes over the transport from warehouse to buffer supermarkets and all the way to the production line.
Supermarkets are common in industrial material supply process in order to reduce response times.
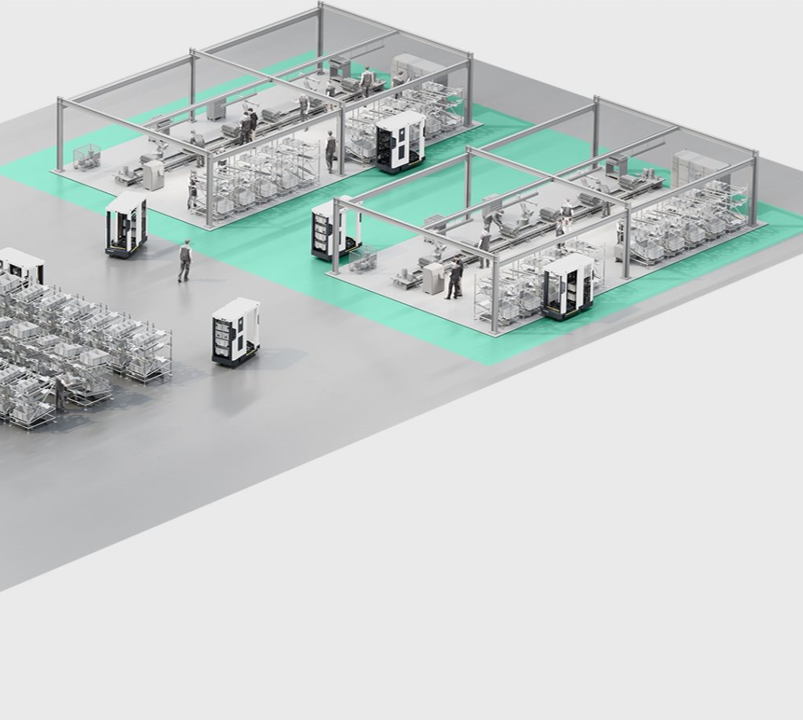
Production Line
SOTO delivers boxes directly into the flow racks at the production line. The right material, at the right time, in the right place. Fully automatic and continuous.
Empty boxes are picked up and returned to the automated small parts warehouse.
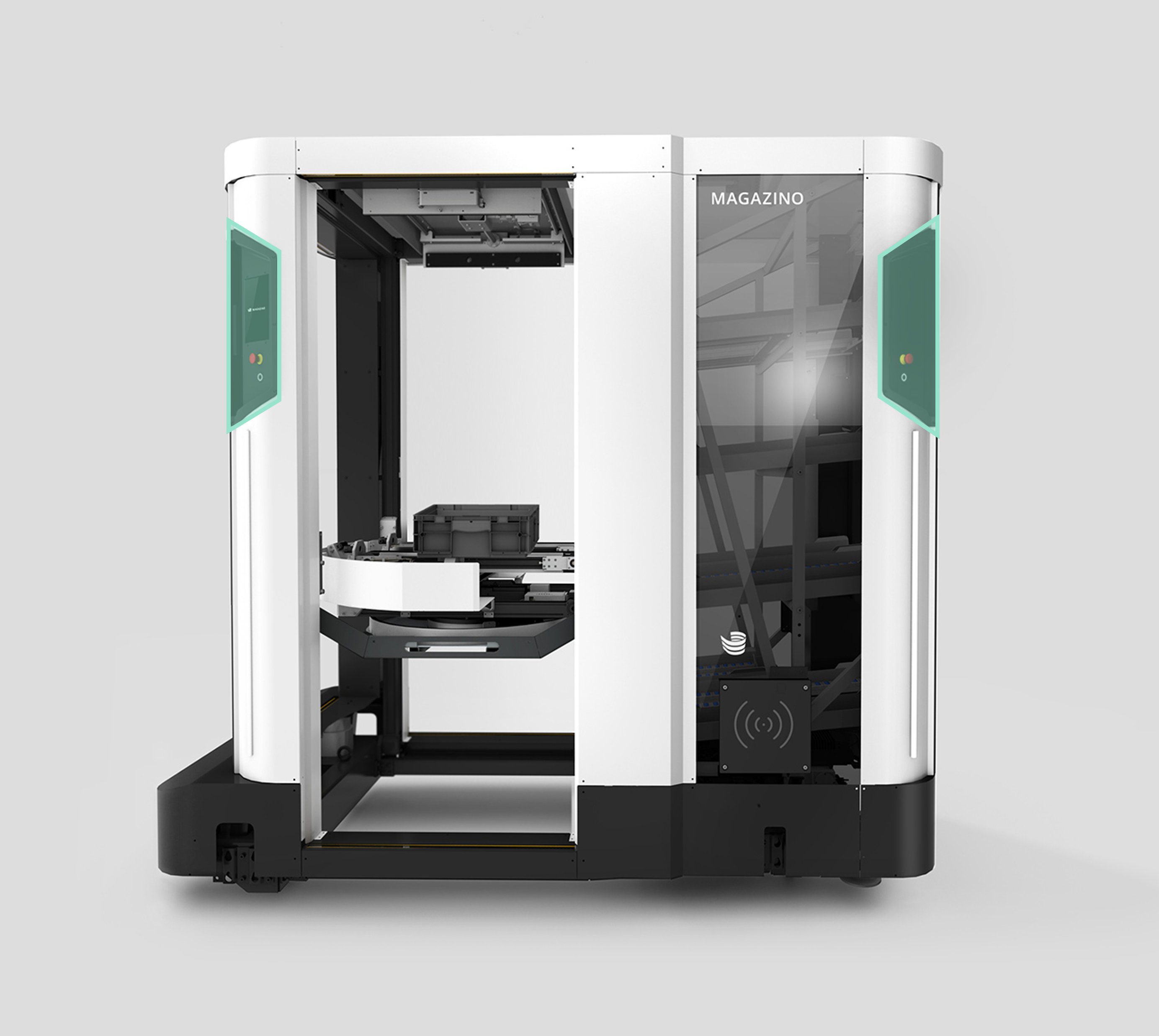
SOTO
To operate SOTO successfully, the robot, the transported objects, and the physical environment used for operations must all be compatible.

Relevant technical data of SOTO and environmental requirements for successful robot integration:
Robot data
Physical footprint | 2146 × 1060 mm |
Virtual footprint with small safety field | 2430 x 1280 mm |
Height | 2240 mm |
Empty Weight | 733 kg – 777 kg |
Maximum Payload | 207 kg – 251 kg |
Maximum Speed | 1.5 m/s |
Run Time without charging | up to 8 hours |
Recharge Time | 1.6 hours (5:1 ratio) |
Load carrier transport
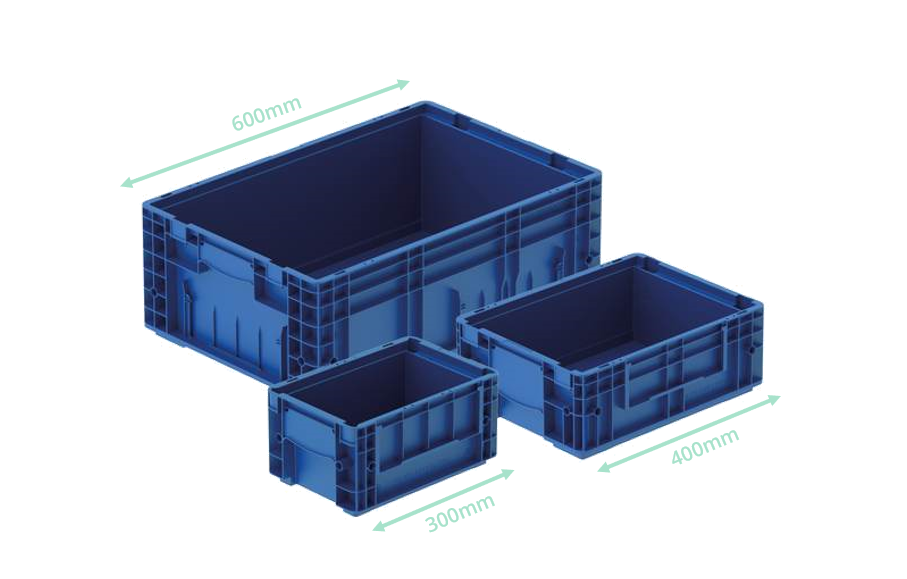
SOTO supports small load carriers according to VDA 4500 (R-KLT, RL-KLT) and comparable small load carriers.
Minimum grasping height | 400 mm (lateral grasping) |
Maximum grasping height, lateral/frontal grasping | 1700mm if load carrier height <= 220mm |
Supported load carrier dimensions | 300 × 200 mm |
Maximum weight per load carrier | 20 kg (homogeneously distributed) |
Supported load carrier heights | 80 – 320 mm (no items protruding from the box), the width must always be greater than the height |
Max. number of KLTs per robot | 8 (600×400 mm) – 24 (300×200 / 400x300 mm) |
Center of gravity of the payload | max. 2/3 to one side |
Space
Recommended | Maximum | |
Width to drive slow | 1800 mm | 1650 mm |
Width to drive fast | 2800 mm | 2510 mm |
Height of passage during operation | 2280 mm |
More detailed corridor requirements can be found in the SOTO datasheet.
Corridors must be kept free at every height. In particular, shelf adapters must be considered when measuring corridor width.
Floor
Recommended | Maximum | |
Maximum floor gap width for driving over | 0 mm | 10 mm |
Height of passable floor unevenness | 0 mm | 5 mm |
Maximum floor inclination | 0° | |
Floor load capacity | 1000 kg |
Additional floor properties according to DIN 18202 – Industrial floors.
Operating Conditions
Temperature Range | 15 °C – 35 °C |
Maximum Temperature (short term, up to 1h) | 40 °C |
Air Moisture | < 95%, non-condensing |
Floor | dry |
Illumination | no direct “horizontal” light source |
Components
SOTO is built in a modular fashion, with each component designed to fulfill a specific, independent task.

There are five major components:

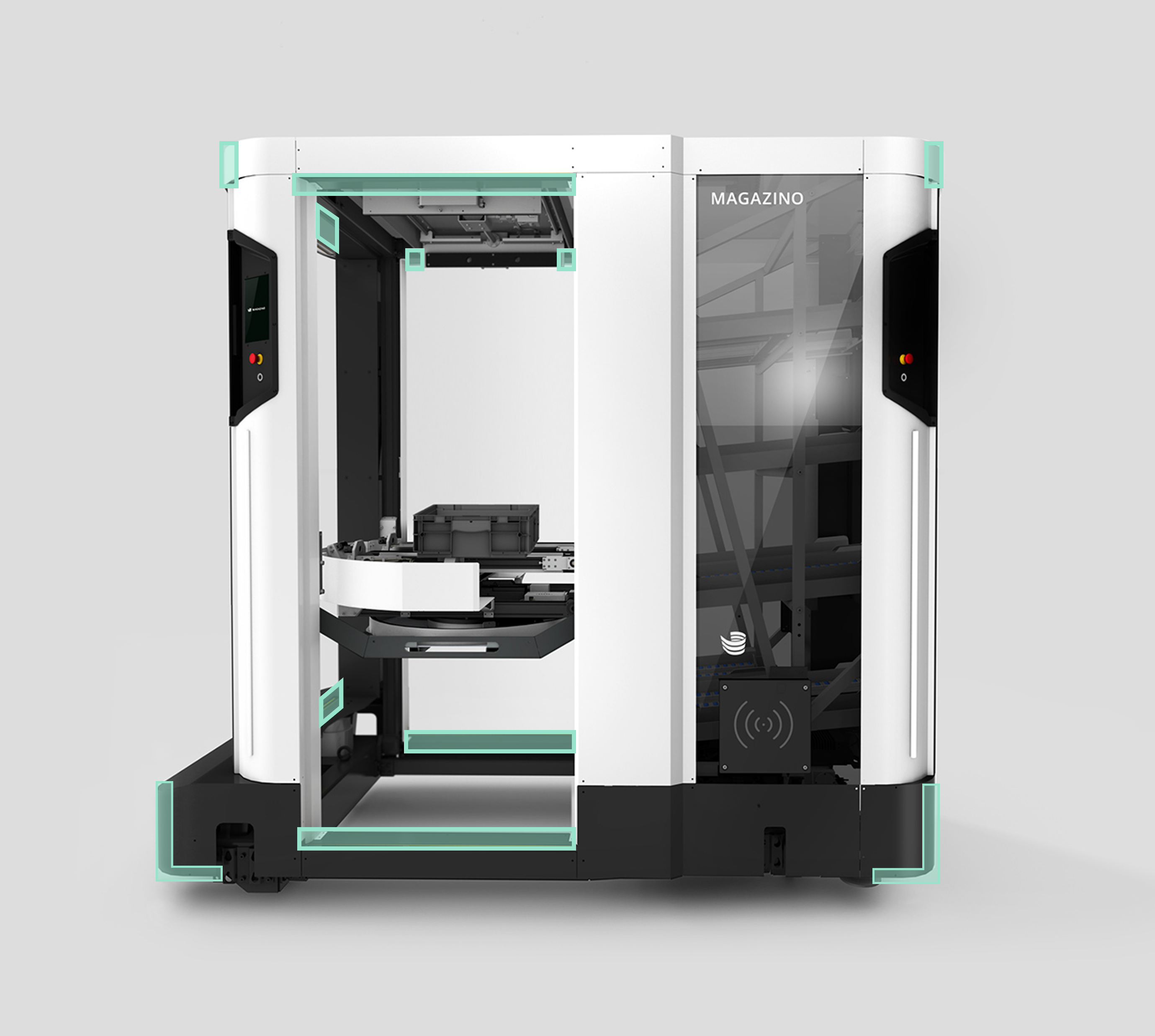
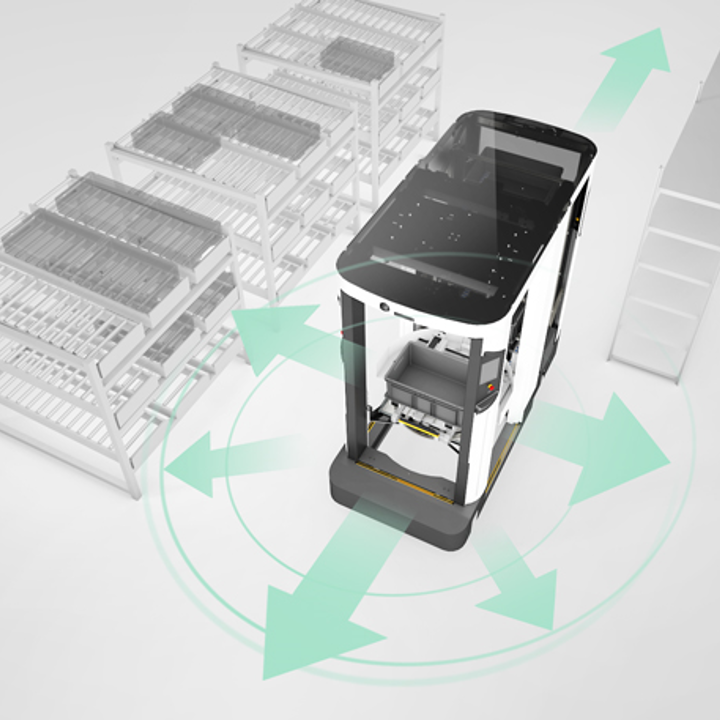
Drivebase
The omnidirectional drive enables precise manoeuvering even in the most restricted spaces.
With 3D cameras at the front and rear and a localization laser scanner at the top, the robot can navigate independently and react to changes in the environment.
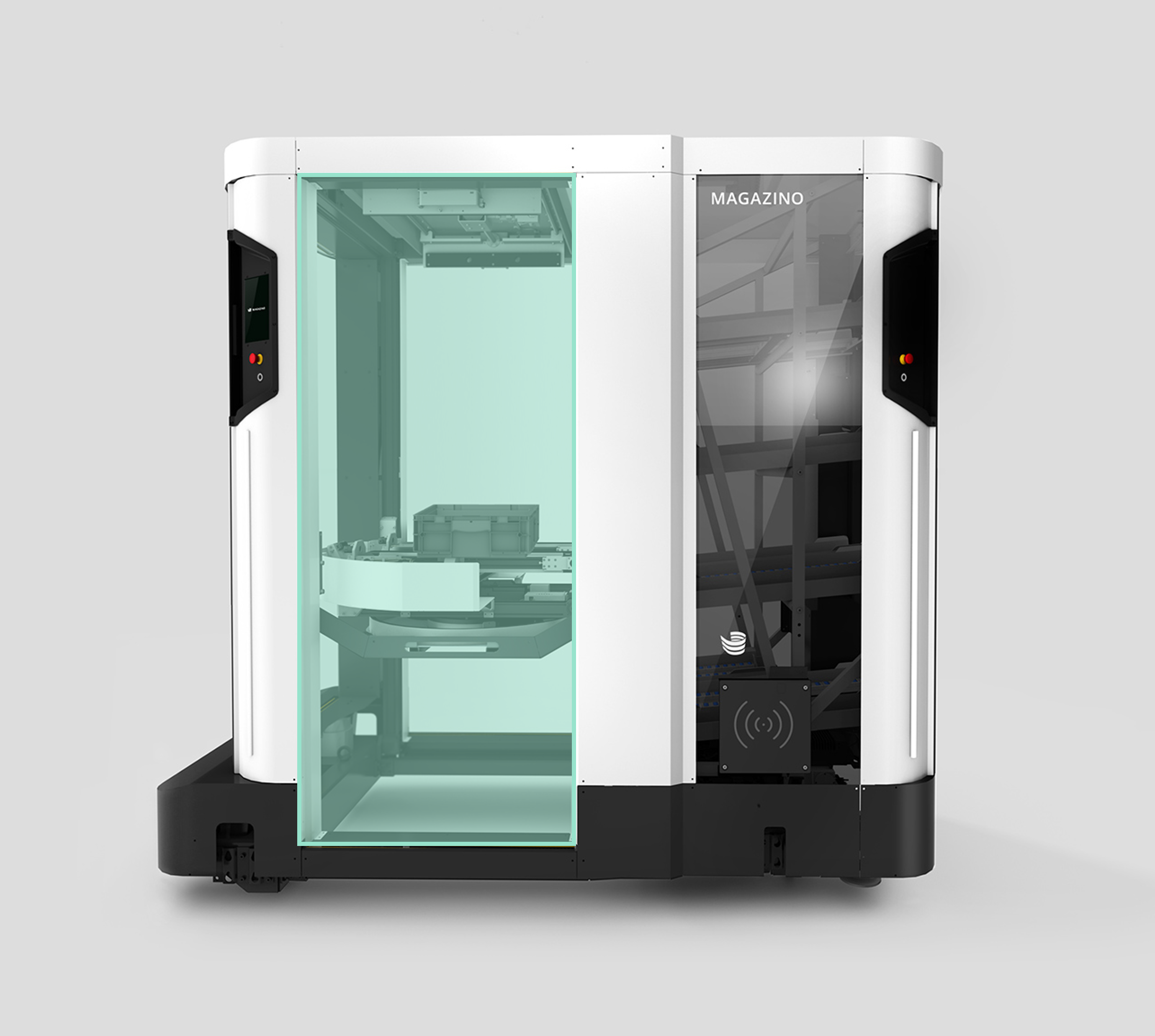
Backpack
SOTO can temporarily store multiple objects in the vehicle and transport them between source and sink.The backpack arrangement can be configured according to customer specifications for a maximised utilization level on every tour.
The backback is double-deep - meaning more than one identical box can be stored behind each other in every slot. Boxes can be retrieved with a tilting mechnism.
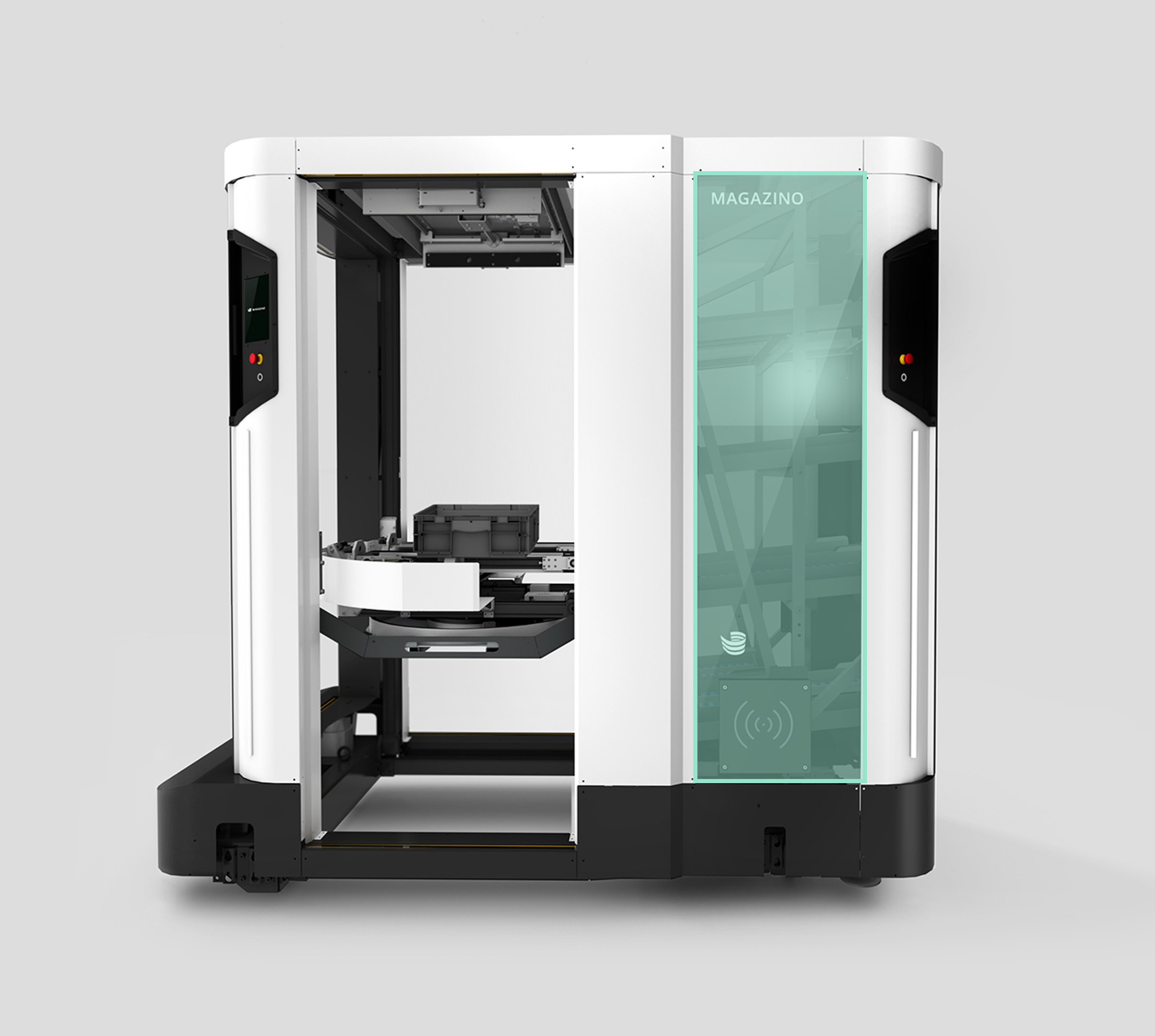
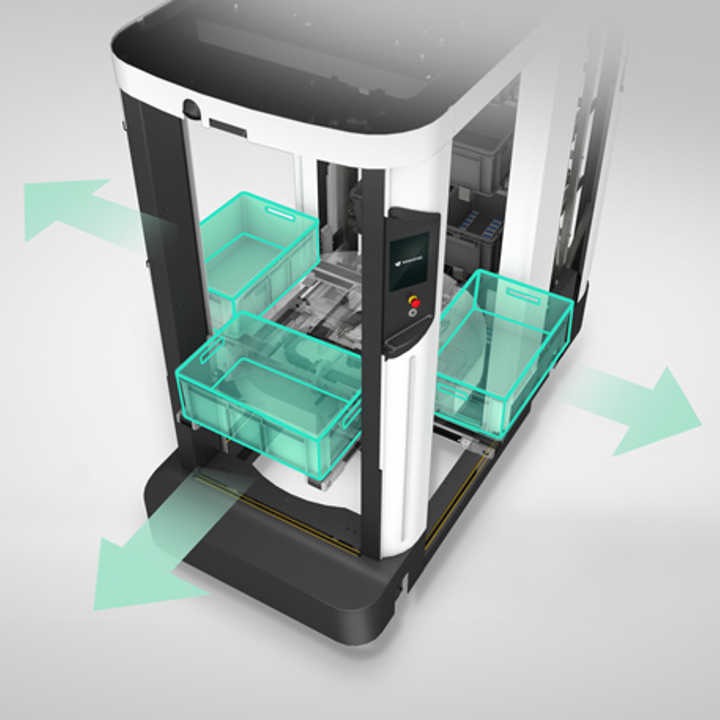
Gripper
The conveyor band gripper can move in height as well as deliver and pick up load carriers in all four directions - frontal, lateral left and right, and backwards into the backpack. Equipped with a range of sensors the gripper can detect the stored boxes and even compensate misalignments.
The gripped load carriers can be held in a press mechanism in the upper area of the robot while the gripper rotates underneath it, in order to change the orientation of the load carrier within the robot.
Safety
Certified safety laser scanners at the front and rear enable SOTO to navigate freely at up to 1.5 m/s. They also guarantee safe operation in parallel to people and other vehicles.
Depending on how close an obstacle comes, SOTO automatically reduces its speed until it stops or looks for an alternative route.
SOTO Display
If human interaction is required, touch displays show the relevant information and enable intuitive operation by employees directly on the robot.
Summary
Summed up, the key features of SOTO are:
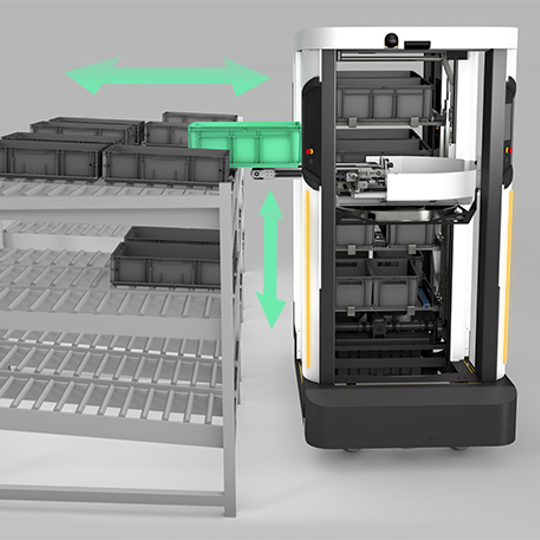
Flexible handover height from 400 mm up to 1700 mm depending on load carrier height
Minimum required aisle width of 1650 mm and a maximum speed of 1.5 m/s with natural navigation

Operation time of 8 hours on one charge, Li-Ion battery (lithium-iron-phosphate battery)
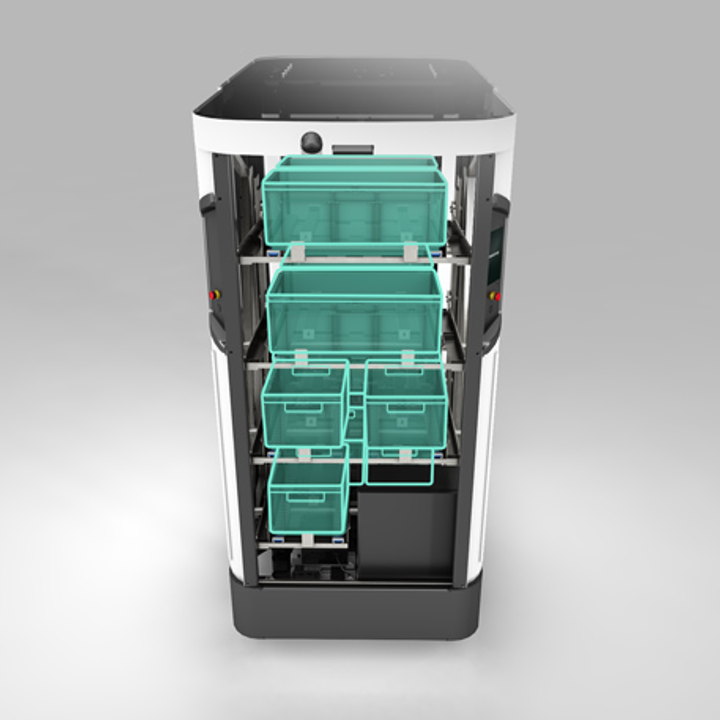
The backpack carries 8 to 24 load carriers and can be configured based on customer requirements
Handling of standard load carrier sizes (300x200 mm, 400x300 mm, 600x400 mm) on three sides of robot and into the backpack

Maximum load carrier weight of up to 20 kg with a total payload of up to 240 kg