
EUT04 - Safety briefing
Foreword
The following types of safety instructions are used in this document:
.png?inst-v=623fd237-c9af-448b-8290-279da381d7b9) | Danger! |
|---|---|
Danger describes a hazard which, if not avoided, will result in death or irreversible injury. |
| Warning! |
|---|---|
Warning describes a hazard which, if not avoided, can result in death or irreversible injury. |
| Caution! |
|---|---|
Caution describes a hazard which, if not avoided, may result in minor injury. |
 | Notice! |
|---|---|
Notice describes a hazard which, if not avoided, may result in damage to the machine. |
General safety guidelines
Whenever you are within a SOTO working area obey the following guidelines:
Only use SOTO in excellent condition. Take the robot out of operation if you detect any damage to any robot components. Contact the responsible supervisor or Magazino.
Always pay attention to the robot whenever you are within its proximity.
SOTO is fitted with safeguards to ensure your safety as described in this module. However, do not put this to the test unnecessarily. Move out of the robots way if possible.
When you walk into pathways with limited visibility along the path, pay attention to the bluespot.
If you are unsure or feel threatened in any way, press the emergency button. They are meant to be used.
If you observe any contamination of the floor - i.e. liquid spillage - within the work area of the robot, remove the contamination before you continue operation of SOTO.
The robot can only detect obstacles above certain sizes at defined positions. Remove small diameter obstacles on the floor or at height out of the path of the robot. If you are in doubt if a certain obstacle can be detected by the robot clarify with your supervisor. Common example: Resting forks of forklifts or manual trucks.
| Warning! |
|---|---|
Risk of injury! Persons can be caught by falling load carriers. Avoid the danger area at handover stations. |
| Warning! |
|---|---|
Risk of injury! In the event of an error, it may be necessary to remove the load carriers from the robot manually. Comply with the recommendations for safe lifting and carrying of loads. |
| Warning! |
|---|---|
Risk of injury! Switch off the robot via the power switch before any repair or cleaning. |
| Caution! |
|---|---|
Risk of injury! Persons can reach through the flow rack and reach moving parts of the gripper as well as the load carrier during Pick-Up and Put-Down. |
| Notice! |
|---|---|
Laser class 1 according to DIN EN 60825-1:2003-10. |
Warning signs
Warning signs indicating a potential crushing hazard for hands and fingers are clearly visible on all sides of the openings.
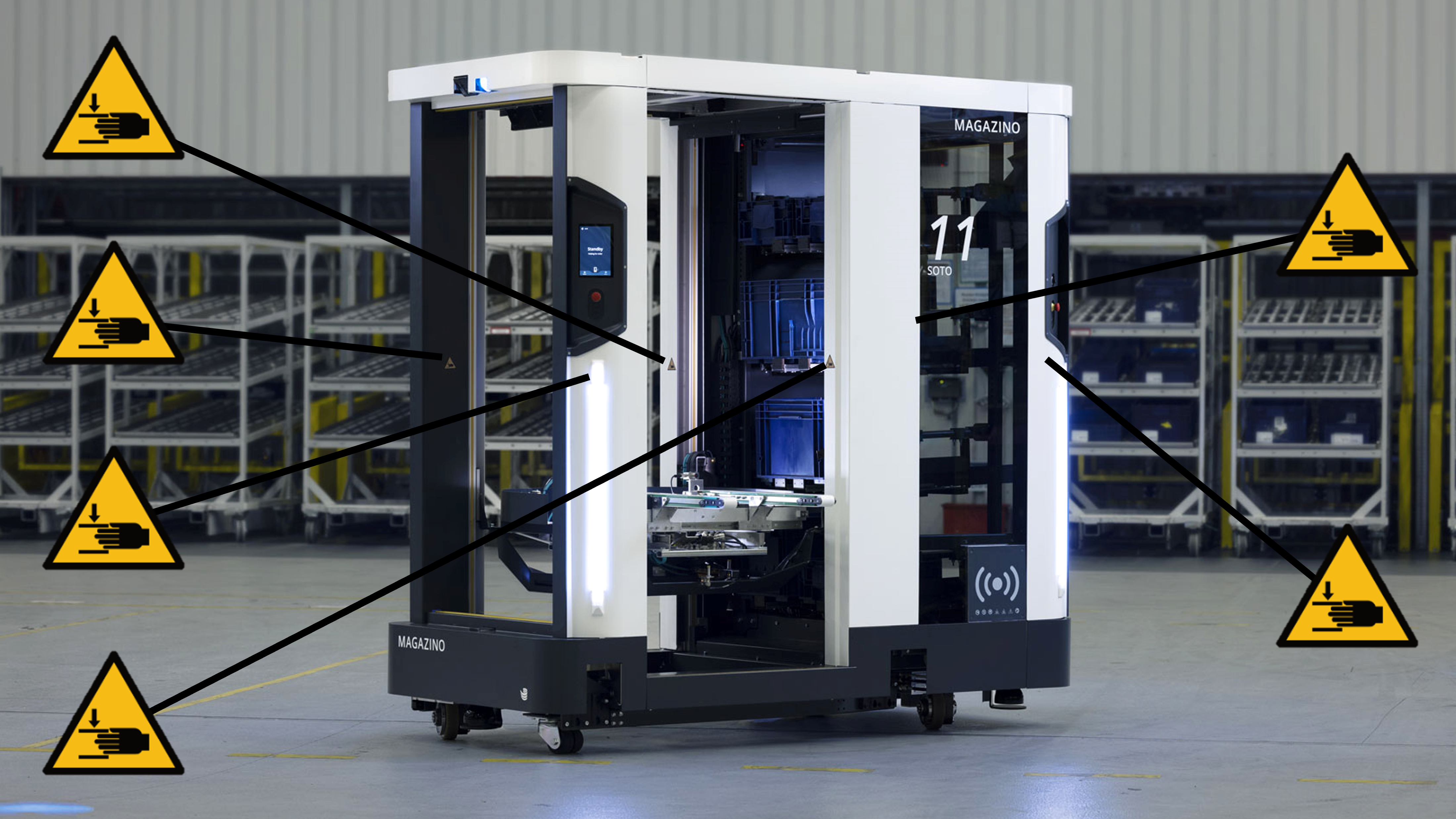
| Caution! |
|---|---|
Risk of injury! Persons can reach into the robot and come in contact with moving parts of the gripper or backpack. |
| Notice! |
|---|---|
The robot may only be operated with attached warning signs. Contact Magazino if damaged or removed warning signs need to be replaced. |
Safety concept
The safety concept of the robot ensures safe, autonomous operation alongside humans. The use of proven safety components with a safety controller ensures that the robot is always in a safe state during automatic operation.
Emergency stop buttons
Pressing an emergency stop button results in an immediate stop of all dangerous robot movements.

There are a total of four emergency stop buttons located on all four corners of the robot, which are always within arm's reach.
The emergency buttons work as follows:
Press the emergency stop button. The robot stops all dangerous movements.
Unlock the emergency stop button to be able to put the robot back into operation. Turn the emergency stop button in any direction until the button is unlocked.
Press the acknowledge button (below the emergency stop button) to put the robot back into operation.
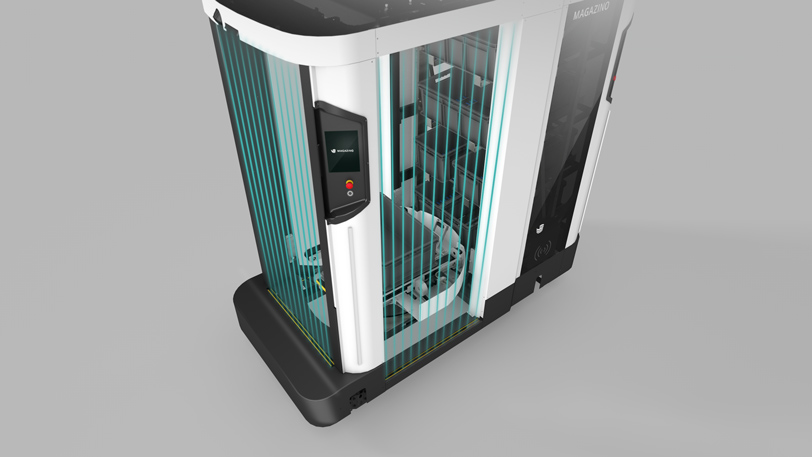
Safety laser scanners
Three certified laser scanners form a protective area around the robot at a height of 0.12 m. If this area is breached, SOTO slows down or halts its drivebase, resuming automatically once the field is clear.

The robot only monitors the surroundings at a height of 0.12m. Bear in mind that the robot cannot detect obstacles below or above this height.
There are a total of three safety fields for different detection ranges around the physical footprint of SOTO. The robot monitors these fields for obstacles or personnel in its path. The safety fields are the small, medium and large field.
The small safety field is always active — without exception.
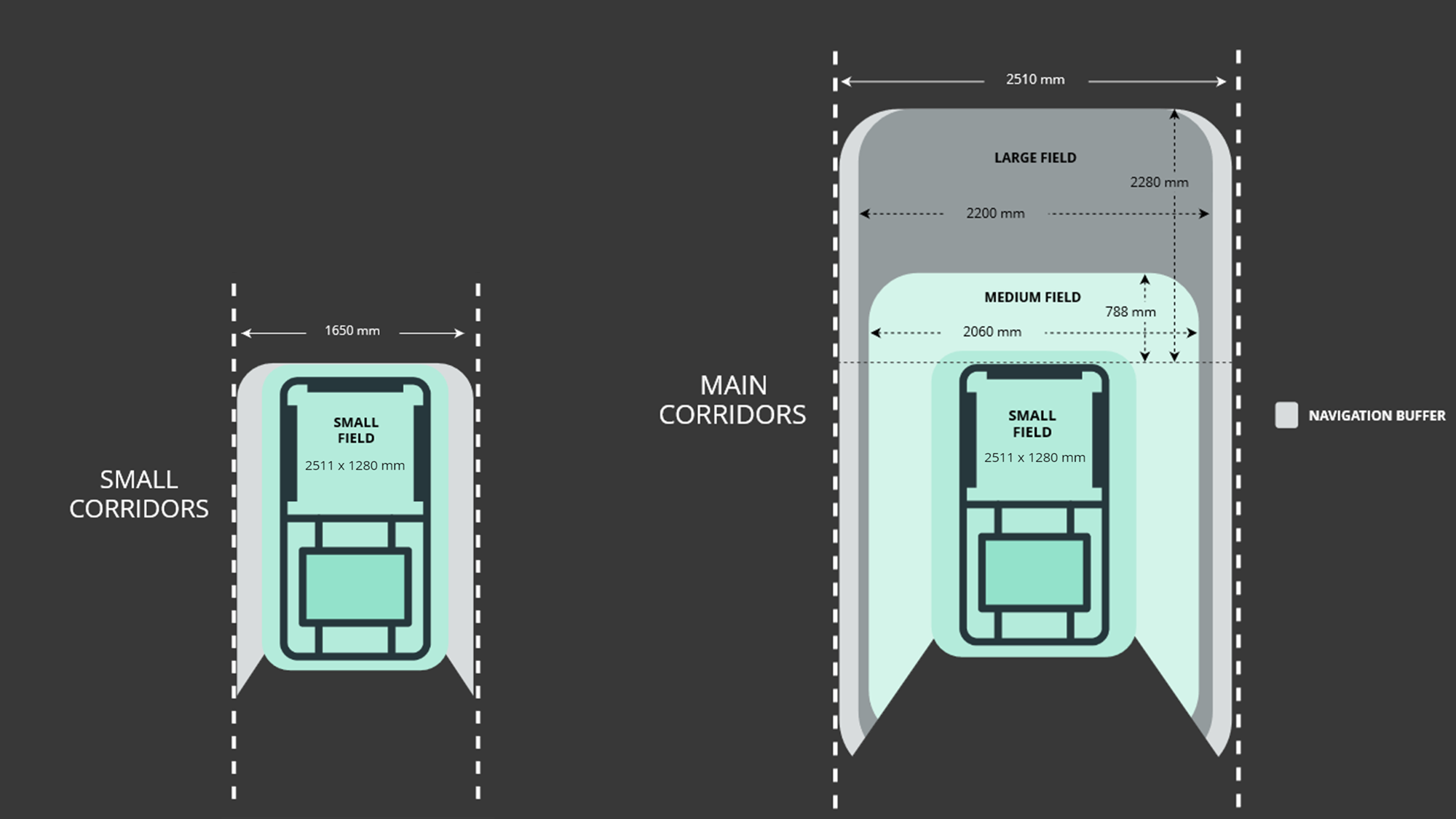
The safety fields are defined as follows:
Safety Fields |
|
|---|---|
Laser scanner height | 120 mm |
Minimum obstacle width detectable at laser scanner height (safe personnel detection with performance level D according to ISO 13849) | 70 mm in large and medium field |
Minimum obstacle width detectable at laser scanner height (standard obstacle detection) | 25 mm |
Small field (L x W) | 2511 x 1280 mm |
Medium field | 788 mm to front and rear of robot 500 mm to side of robot |
Large field | 2280 mm to front of robot |
The maximum permissable speed of the robot in any situation is evaluated on the basis of violated safety sensor fields. The robot automatically reduces its speed to the permissable level depending on its surroundings.
Permissable robot speed |
|
|---|---|
Maximum speed if no fields are violated | 1.5 m/s |
Maximum speed if large field is violated | 0.8 m/s |
Maximum speed if medium field is violated | 0.3 m/s |
Maximum speed if small field is violated | 0.0 m/s (standstill) |
Lateral driving speed | 0.2 m/s |
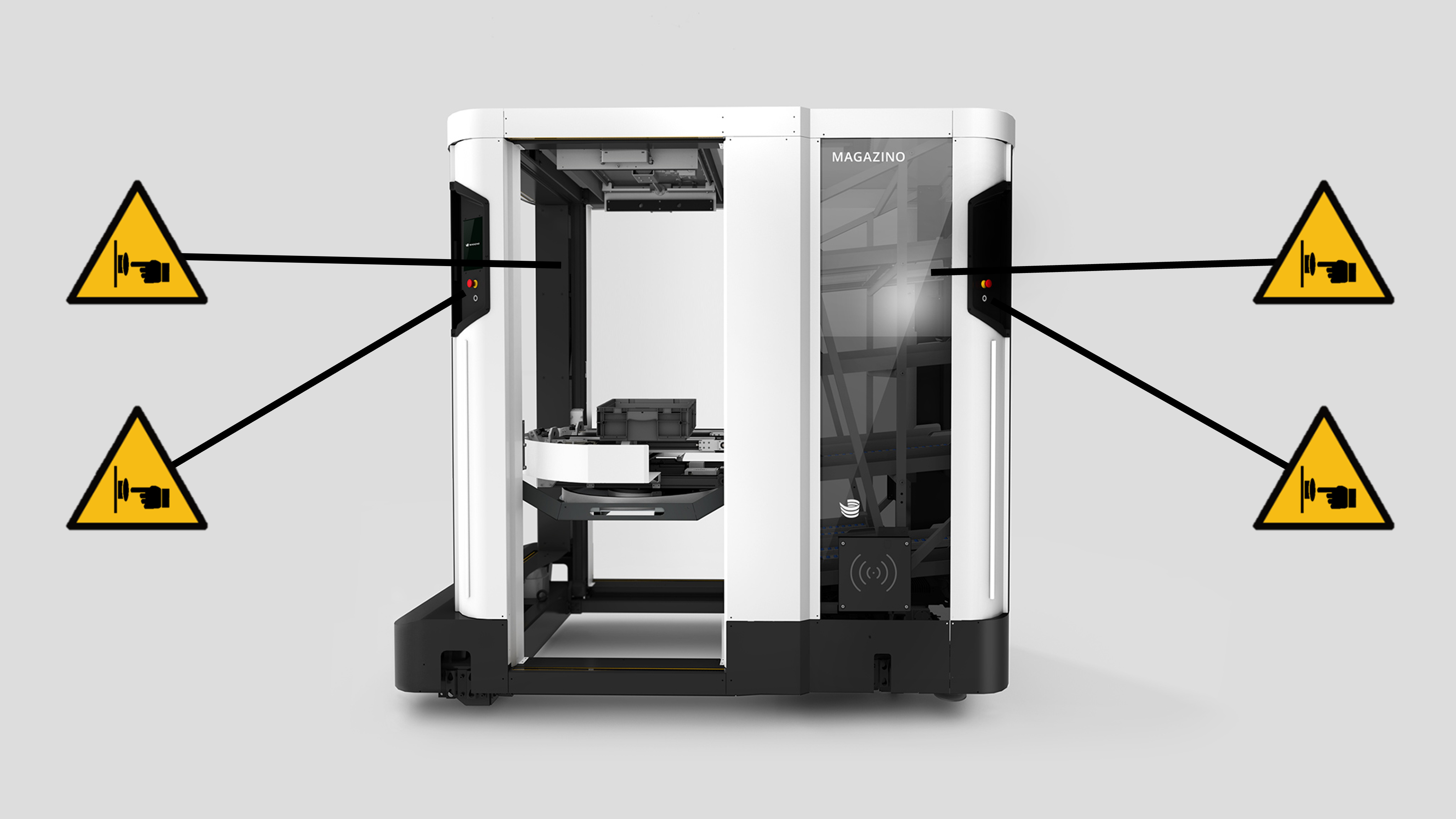
Safety light curtains
Four certified light curtains protect the interior of the robot. Any intrusion, such as a person reaching in, breaches these curtains, which triggers an immediate stop of all SOTO movements and requires the operator to acknowledge the safety event.
To enable the robot to interact with a handover station, the docked state is detected at the handover station and the corresponding light curtain is deactivated towards the docked side. Do not reach into the gap between SOTO and a shelf while the robot is handing over load carriers.
| Caution! |
|---|---|
Risk of injury! Persons can reach through the flow rack and come into contact with moving parts of the gripper and the load carrier during pick-up and put-down. Persons can reach between the robot and a shelf while the robot is docked and transferring load carriers. |
| Caution! |
|---|---|
Risk of injury! Persons can reach into the robot and come in contact with moving parts of the gripper or backpack. |
Automatic mode
SOTO mainly operates in automatic mode. Intervention by trained personnel or a specialist is only necessary in the event of a fault.
Light signals in automatic mode
White light pulsating | White light flashing |
|---|---|
 | |
SOTO is on standby and waiting for orders. | The path is blocked. |
One side white and the other red | Red light flashing |
|---|---|
 |  |
SOTO indicates the direction of travel with the white light. | SOTO has an error. |
One side white and the other flashes yellow | Yellow light flashing |
|---|---|
 | |
SOTO indicates a turn. | SOTO interacts with a handover station. The light curtain facing the handover station is switched off. |
Green light pulsating | Green light constant |
|---|---|
 | |
SOTO is charging. | SOTO is fully charged. |
Manual mode
The gamepad controller can be used to move the robot (i.e. during mapping or re-localization).

| Danger! |
|---|---|
Risk of accident! SOTO can be driven outside of the working area in manual mode. As the operator, you are responsible for maintaining safety at all times while operating SOTO with the controller. |
| Notice! |
|---|---|
Risk of damage! The robot can be driven against protruding obstacles that are not detected by the laser scanners in manual mode. Do not drive against obstacles. Do not drive the robot outside your field of view. Always ensure that there is sufficient free space above the robot so that the upper laser scanner is not damaged. |
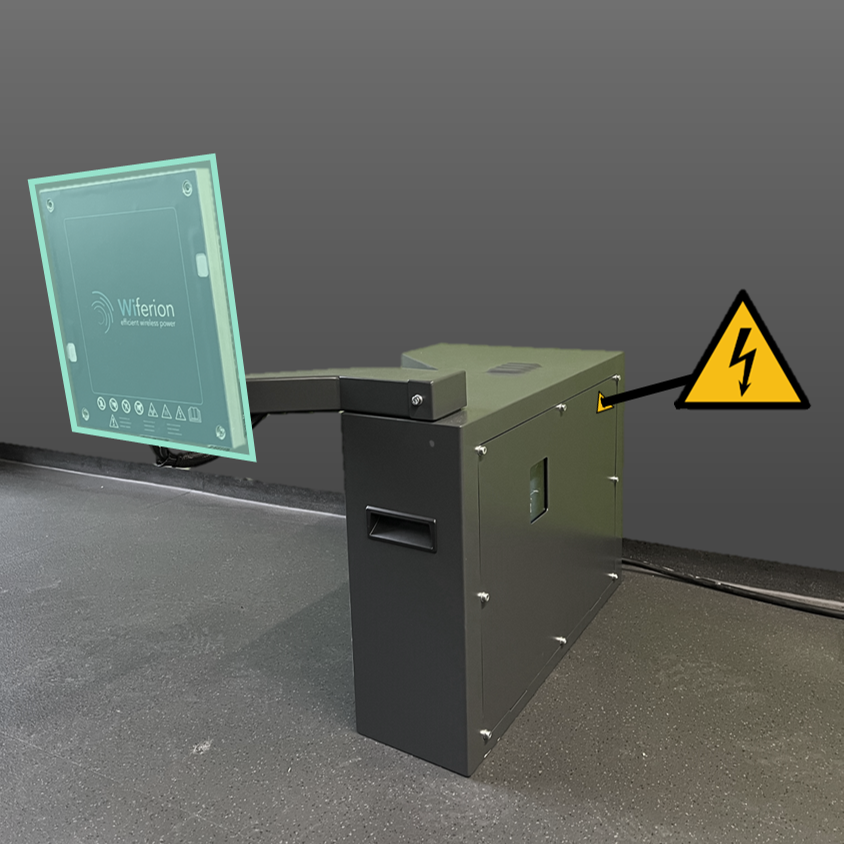
Charging
SOTO uses contactless inductive charging. The robot automatically moves to the charging position. The induction surface of the robot communicates with the induction surface of the charger. Only when both devices have recognized each other is the charger activated and the robot charged.

| Caution! |
|---|---|
Risk of burns! The induction surfaces on the robot and on the charger can become hot during charging. The casing of the charger must remain closed during normal operation. |
| Warning! |
|---|---|
Risk of electric shock! The charger is supplied with 230 V. The charger housing must be closed during normal operation. Work on the charger may only be carried out by trained electricians. Disconnect the charger from the power supply before opening the charger. Do not use the charger if you notice any visible defects. Disconnect it from the power supply and contact a trained electrician. |
| Notice! |
|---|---|
The charger may only be operated with attached warning signs. Contact Magazino if damaged or removed warning signs need to be replaced. |
Bluespot
SOTO warns personnel with a bluespot in the direction of travel.

Pay attention to the bluespot — especially in noisy environments and when stepping into pathways with limited visibility. Do not approach the robot at high speeds.
| Caution! |
|---|---|
Risk of injury! Persons can step into the path of the robot from a shaded position that can not be perceived by the safeguards of the robot. Depending on the scenario and approach speed the braking distance of the robot might not be enough to come to a complete stand-still before making contact. |