EUT03 - Mastercontroller
Introduction to master controller systems
SOTO needs a lot of information to successfully execute a transport order. For example:
Source compartment
Target compartment
Load carrier information
Path
Blockages by other vehicles
Firealarm
Charging status
Available chargers
Status of peripherals (i.e. doors)
…
SOTO does not compile this information itself. Instead, this is the main task of a master controller.
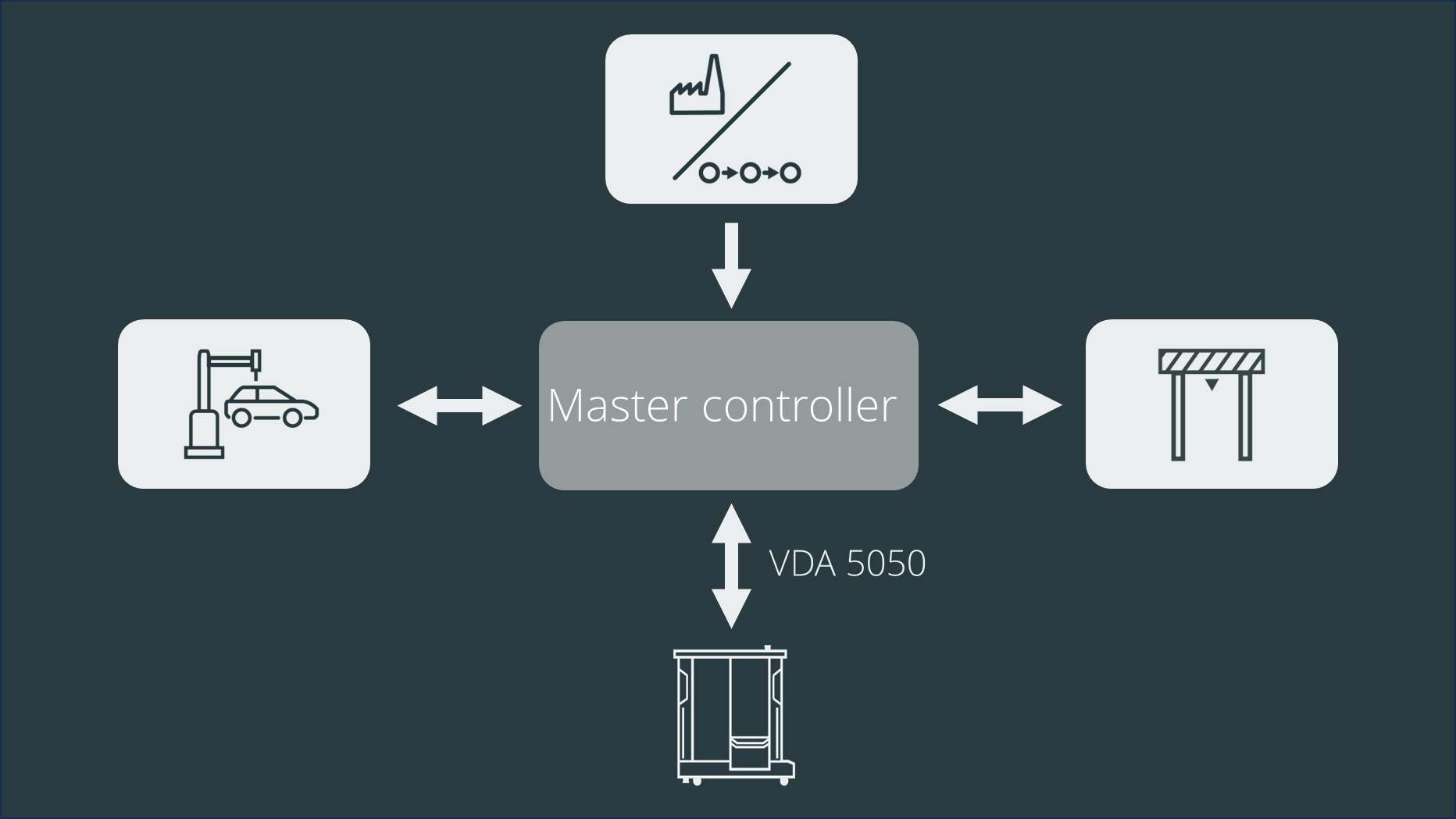
The master controller is responsible to collect all relevant information, evaluate next steps and feed the resulting commands to the robot as required.
Introduction to VDA5050
SOTO is controlled by VDA5050 commands. VDA5050 is a vendor-independent interface for controlling autonomous mobile robot and vehicles.

The VDA5050 standard is published by the German Association of the Automotive Industry together with the Mechanical Engineering Industry Association with the aim of creating a single vendor-independent plug-and-play interface between master controllers and autonomous mobile robots.
The VDA5050 standard provides all compatible robots and master controllers with a defined format for the exchange of order and status data.
In simple terms, the main communication between the master controller and the robot consists of a constantly updated list of commands. The command list contains nodes and edges on which the robot is permitted to travel and the actions to be executed at these positions.
Nodes and edges
Nodes and edges form the so-called driving graph. Nodes are waypoints which are connected via edges.
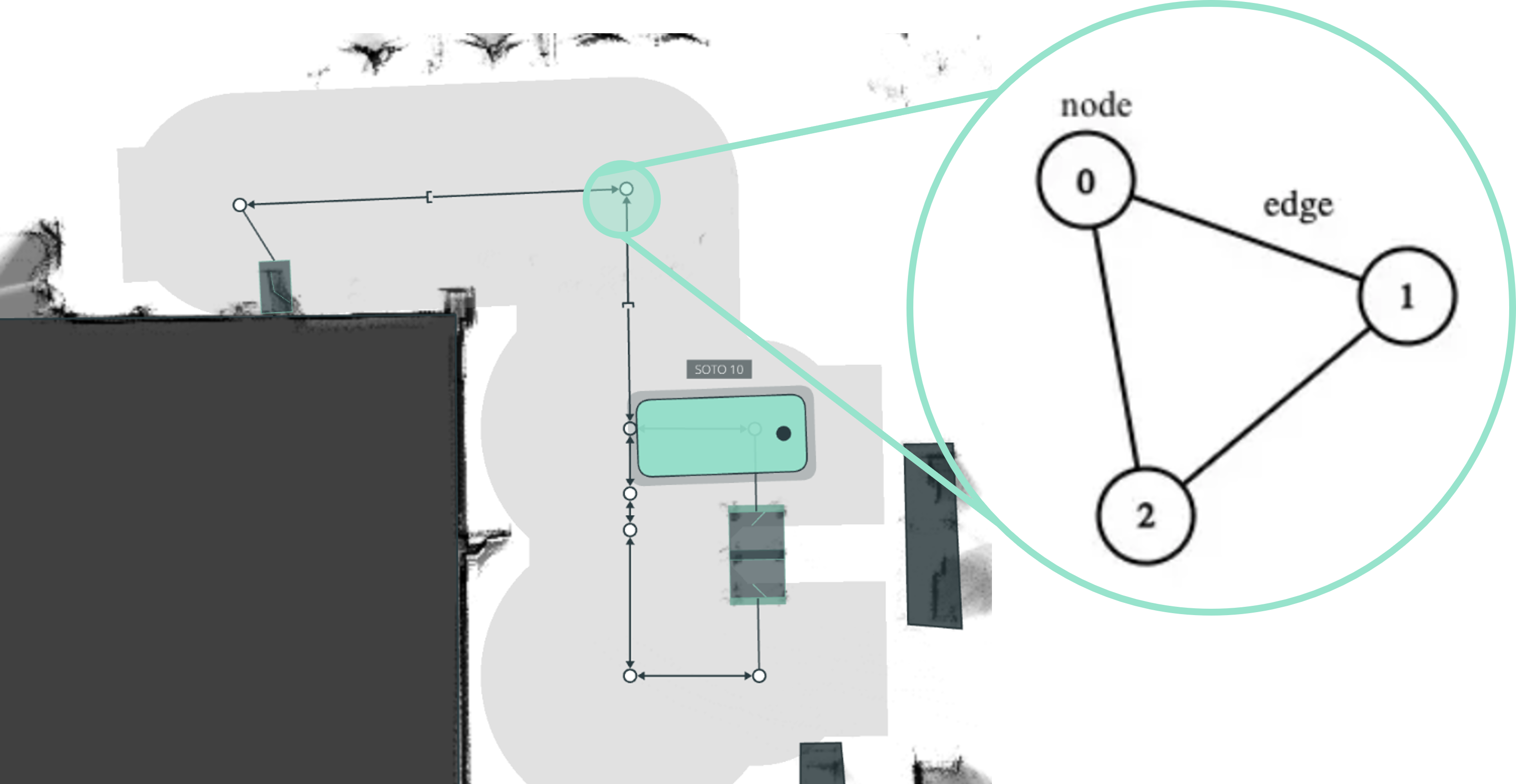
The driving graph is an editable overlay to the 2D environment model in the Magazino Operations Center. The driving graph defines the navigation routes for SOTO.
The master controller needs to have knowledge of the driving graph and the environment model of the vehicles it controls. The master controller submits VDA5050 commands to the robot fleet. VDA5050 commands basically consist of a list of released nodes (nodes that are permitted for travel) and edges with actions attached to them.
To allow for dynamic planning, the entire route of a transport order is not communicated all at once. Instead, only the next steps are communicated and constantly updated. Therefore, the route is divided into "base" and "horizon" components:
Base components are released nodes and edges that are permitted for travel. These nodes are blocked for all other vehicles.
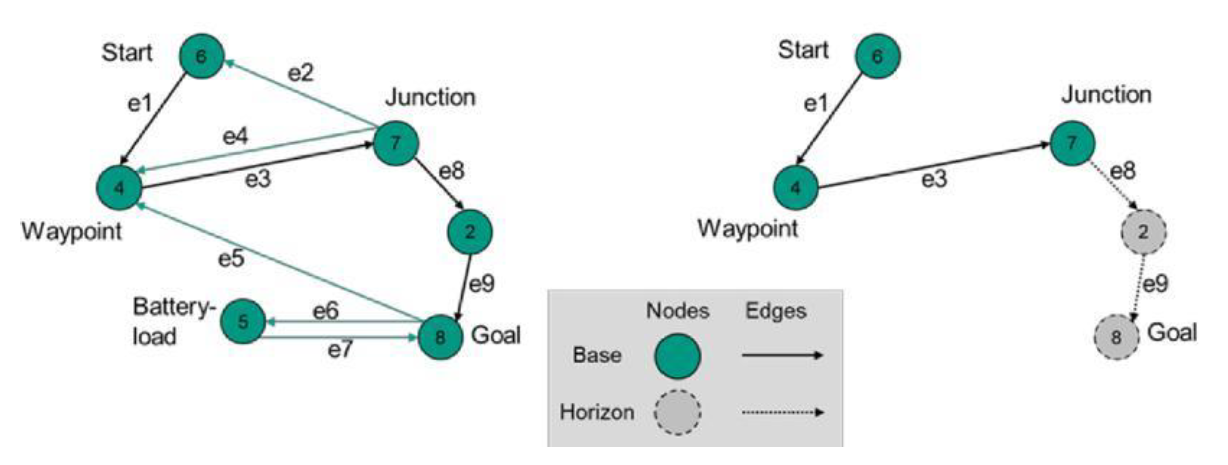
Source: VDA/VDMA - VDA5050
Horizon components, consisting of nodes and edges, are the paths a robot will take after reaching its current base component. These components are not exclusively reserved for a specific vehicle, allowing other vehicles to navigate them. Consequently, the configuration of these nodes remains flexible and may change in response to activity on a dynamic factory floor.
By constantly updating the list of base and horizon components, the vehicle finally reaches its target position. If the robot exhausts its current base components and receives no new horizon components, it will stop and wait.
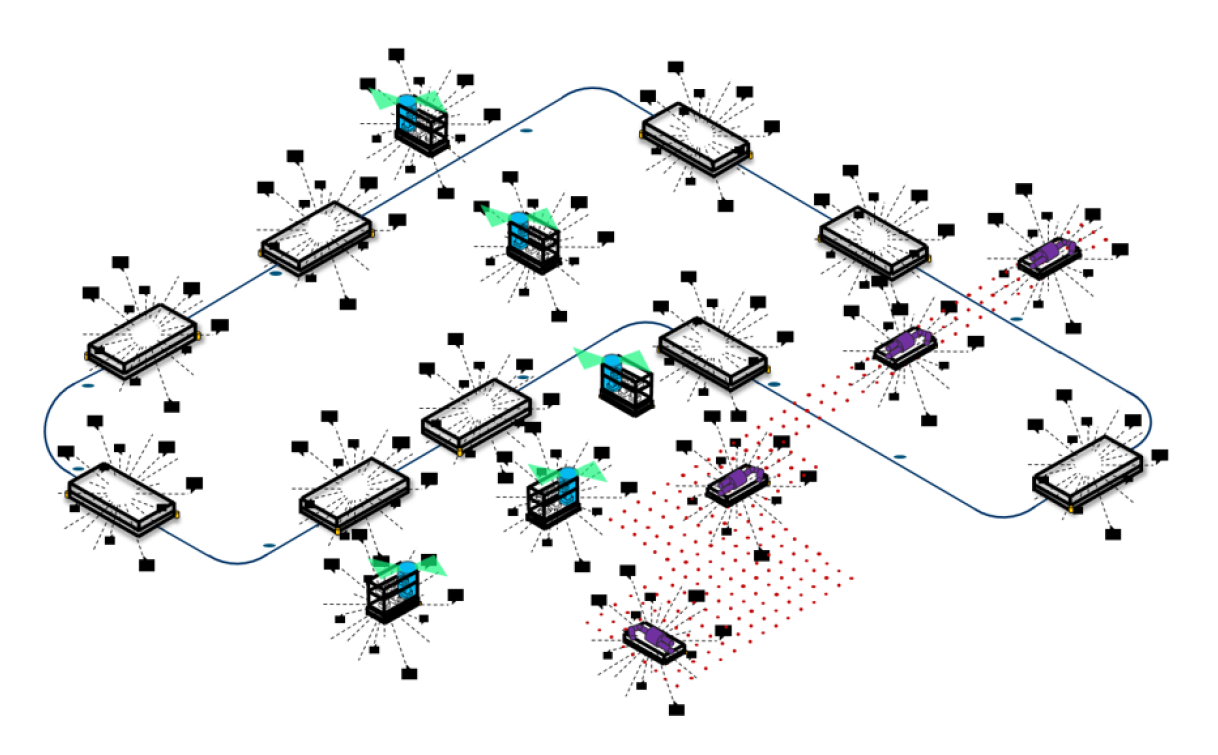
This behaviour is used to control traffic in a multi-robot coordination scenario:
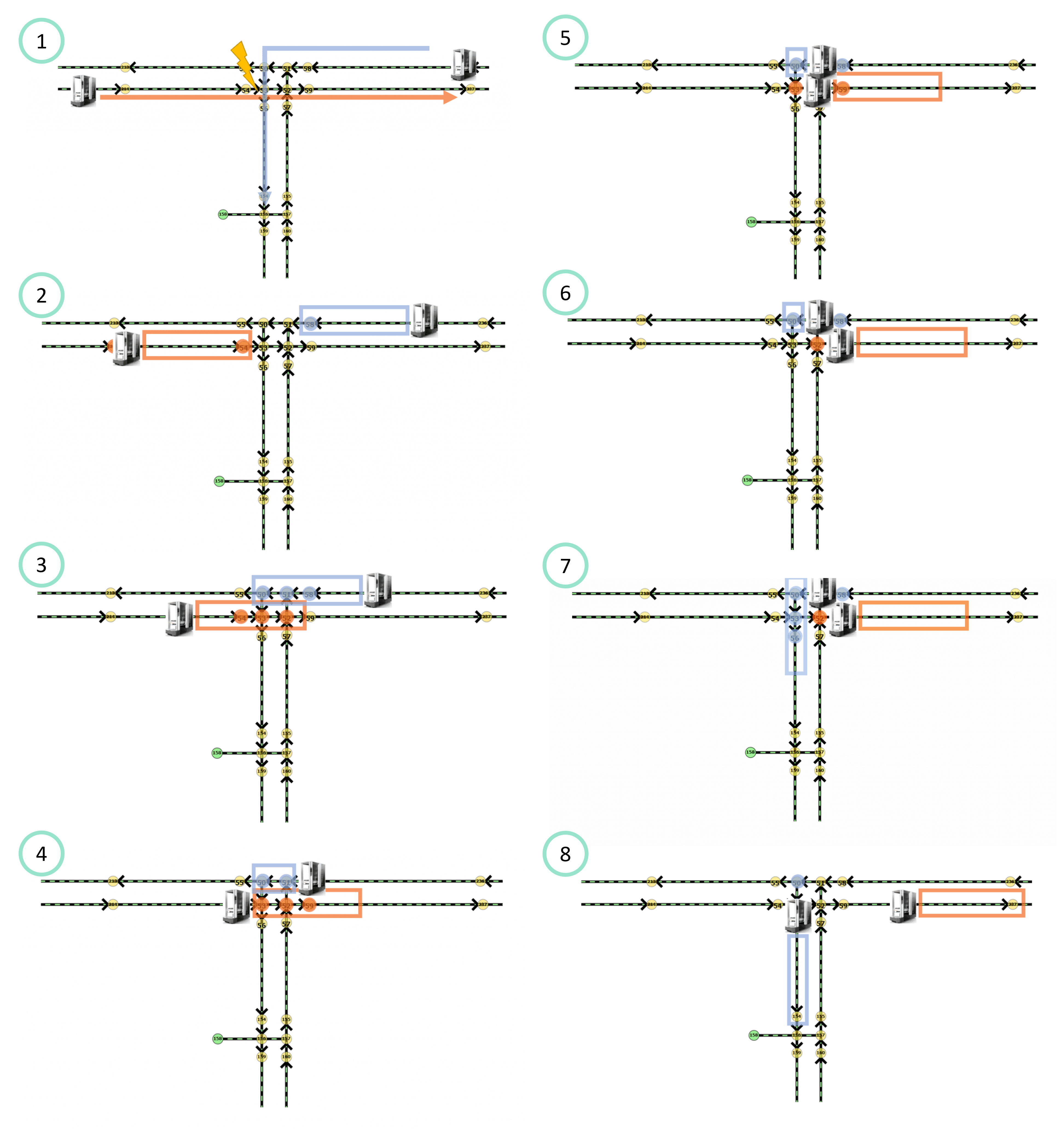
Source: Flexus
If a node is blocked by another vehicle, the master controller will not release the node. The vehicle therefore stops on the last available node and waits for the next node to be released once the other vehicle has driven away.
MQTT broker
VDA5050 commands are transmitted as MQTT messages through an MQTT broker. The MQTT broker is a server that facilitates communication between devices (called clients), using the MQTT protocol. It receives messages on specific topics from publishers and routes them to subscribers.
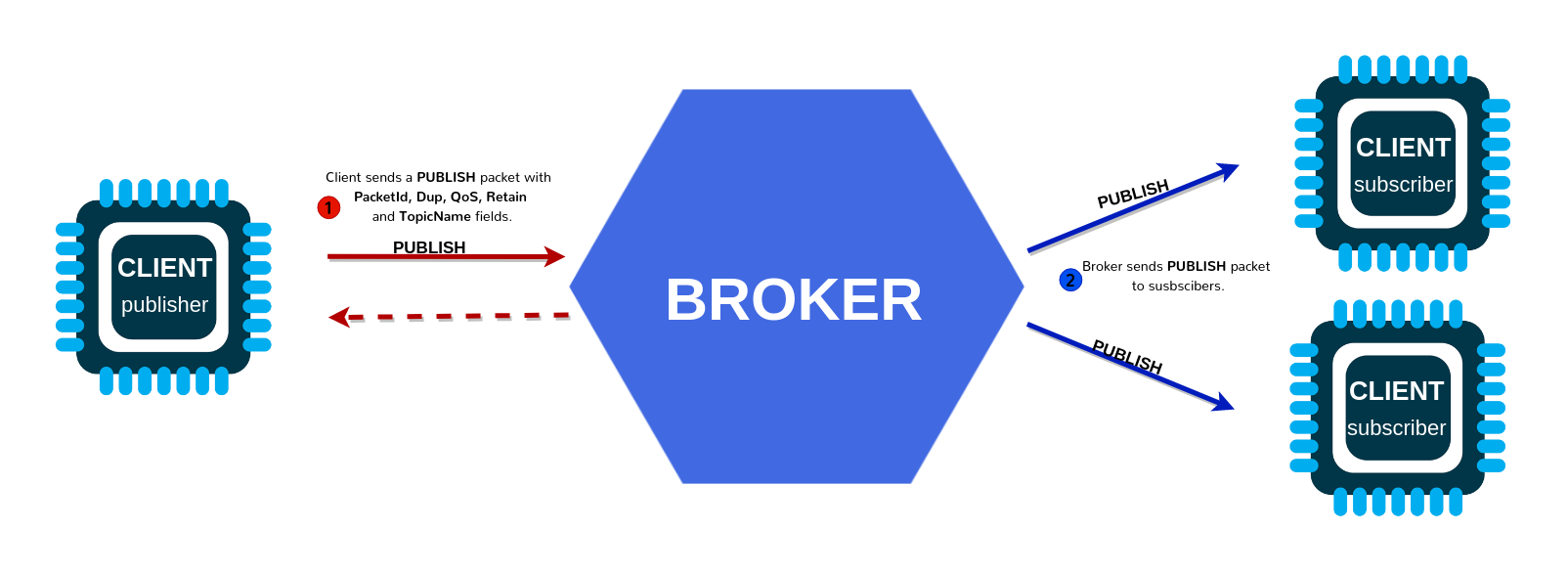
The MQTT broker is the software instance to which SOTO wirelessly connects to receive commands. If this connection is lost, SOTO will not receive any transport jobs. The status of this connection is displayed in the top bar of SOTO's interface on the robot.
Warehouse Management System
Warehouse management systems (WMS) are generally used to manage and control warehouse processes. The WMS tracks stock levels, orders, shipments and the movement of goods within a warehouse. It optimizes the processes of receiving, storing, picking and shipping goods, resulting in improved efficiency and accuracy in inventory management.

The WMS is therefore a typical input system for the master controller.
Master controller with SOTO
SOTO is fully compliant with the VDA5050 standard and can therefore be operated in any VDA5050-compliant master controller network. The master controller is responsible for orchestrating the operation of SOTO and issuing the right commands at the right time.
All peripheral devices such as WMS, fire alarms, station sensors, material request terminals, doors and similar I/O devices must be connected to the master controller.
SOTO can either be operated with the Magazino master controller or any other compatible third-party master controller.
Batching
To manage SOTO's operations, the master controller performs a crucial task called 'batching.' This involves grouping several orders into a single tour, taking into account factors such as order priority, backpack capacity, system layout and delivery sequence.
Last in first out (LIFO)
The double-deep backpack of SOTO requires a LIFO delivery sequence. This means that the robot must first pick up the load carriers that are to be delivered last.
Due to the double-deep backpack this task is quite complex and essential to achieve the highest possible profitability when deploying SOTO.
Fleet manager
If several robots are operating in the same environment, the master controller is responsible for directing traffic accordingly to avoid blocking the vehicles. This is done via VDA5050 messages that control which vehicle is allowed to drive through certain nodes and edges.

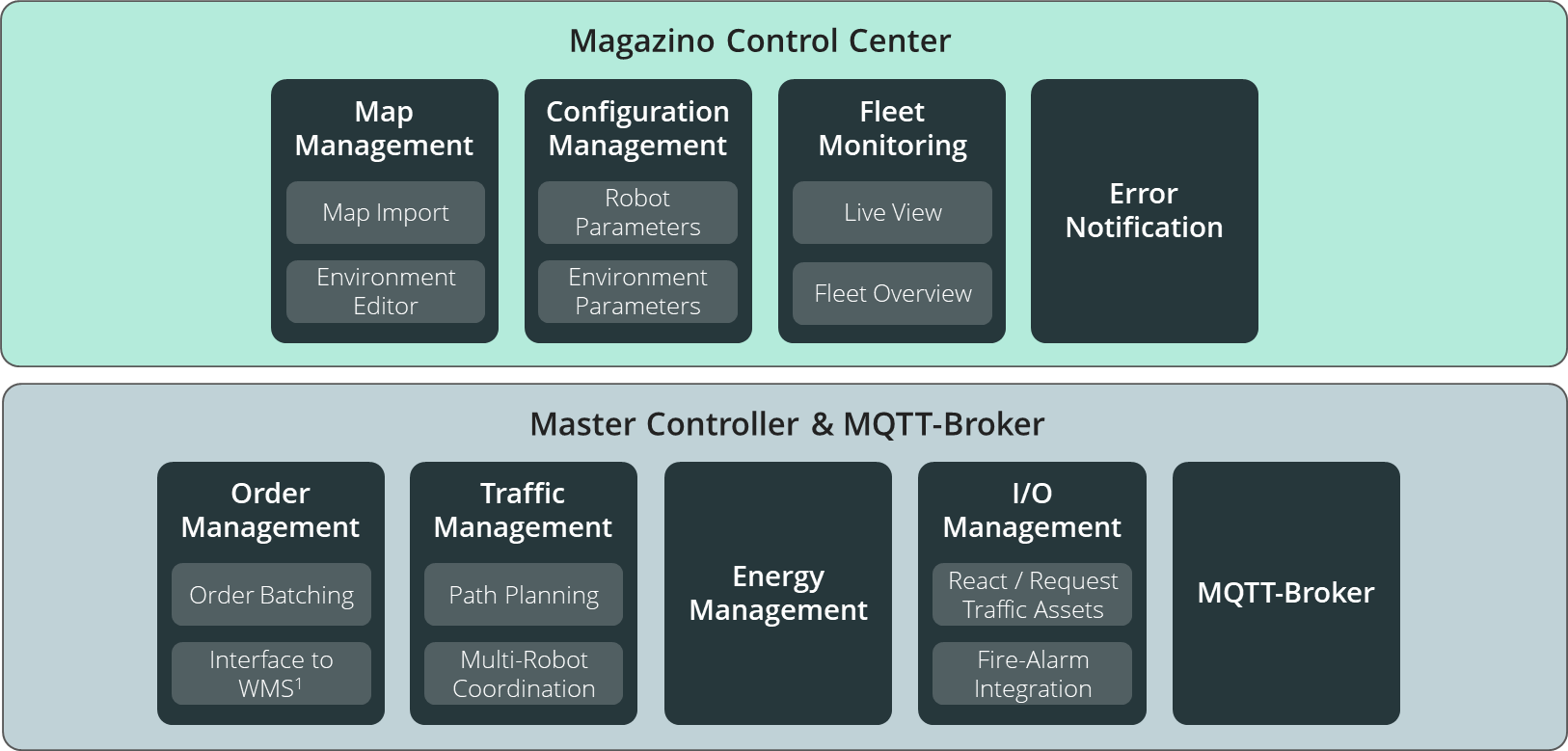
Magazino Fleet Manager
The Magazino Fleet Manager can be used to operate a pure SOTO fleet. The fleet manager does not support vehicles from other vendors.
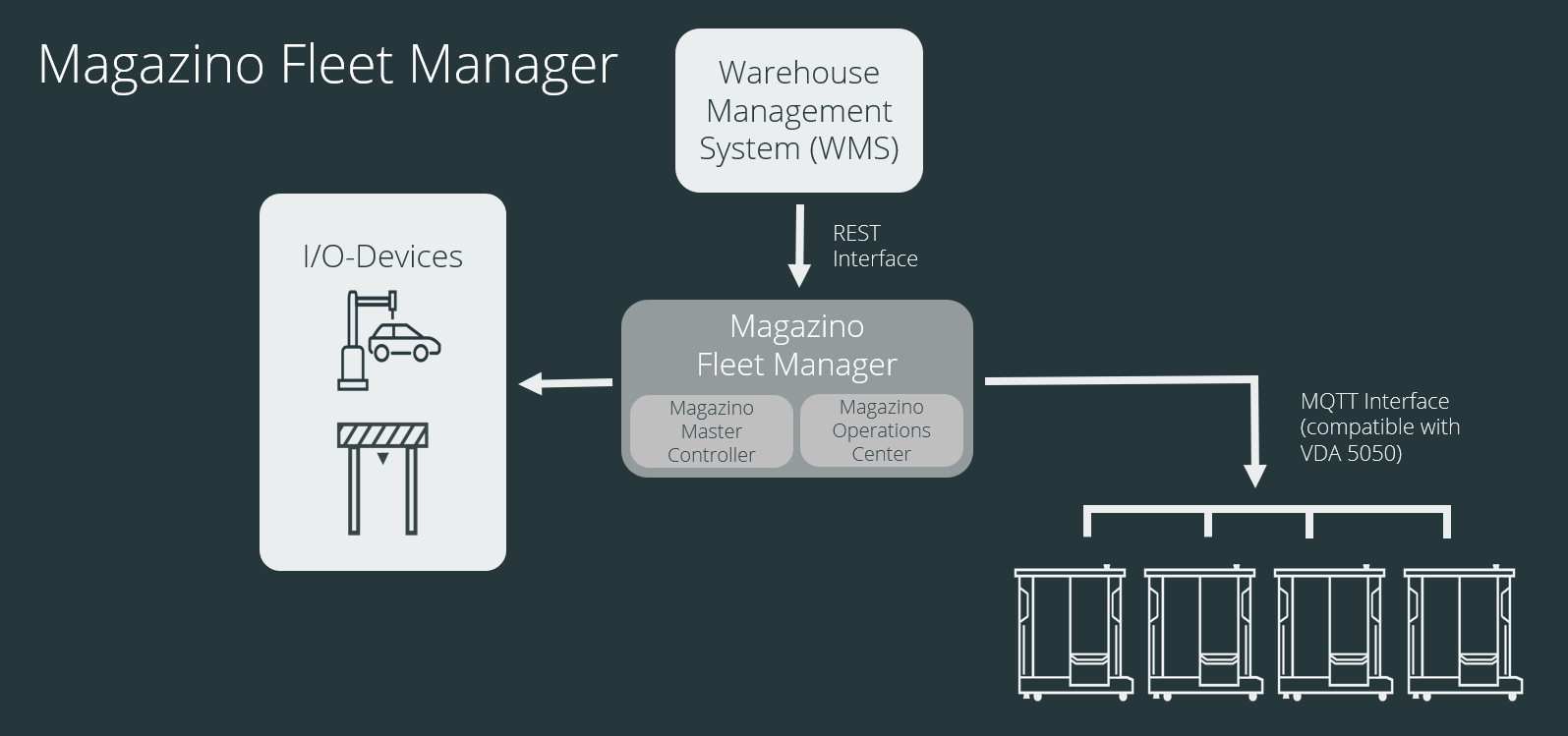
The Magazino Fleet Manager consists of two components:
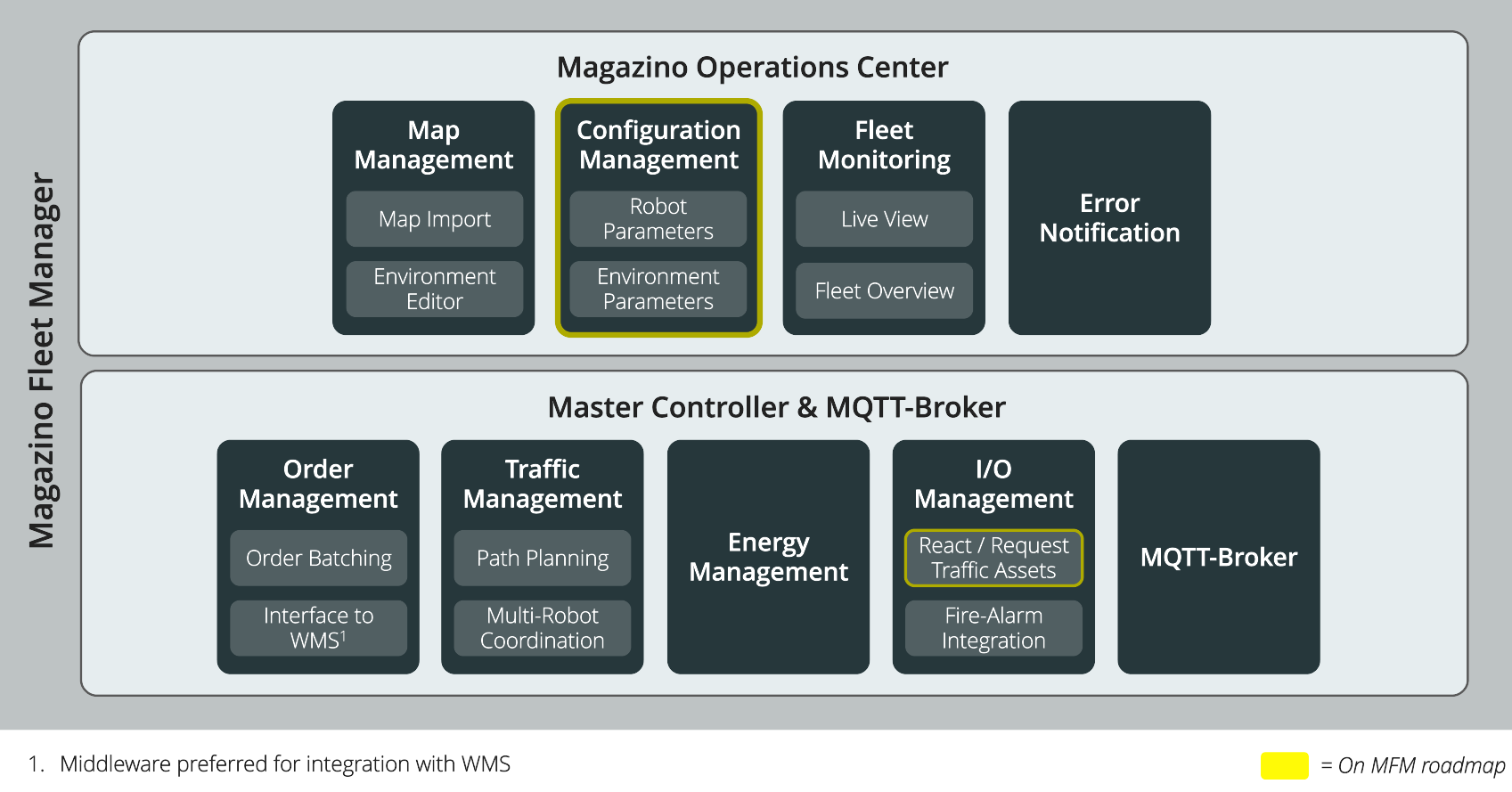
Magazino Operations Center
The Magazino Operations Center contains everything that is required to setup and monitor a single SOTO or a fleet of SOTOs.Magazino Master Controller
The Magazino Master Controller manages a single SOTO or a fleet of SOTOs at runtime.
The Magazino Fleet Manager provides the following services:
The Magazino Fleet Manager offers a RestAPI interface for transport jobs.
To connect other peripheral devices and systems that are not directly compatible, a middleware is required, for example the Jungheinrich logistics interface.
The Jungheinrich Logistics Interface is a versatile communication interface that connects machines and processes in the warehouse. It enables simple and efficient communication between vehicles, the warehouse equipment and the warehouse management software, such as the Warehouse Management System or alternatively a higher-level host system.
Third-party master controller
If you operate a mixed fleet of vehicles, a third-party master controller is required. The third-party master controller must support the following aspects:
VDA5050 (MQTT) communication to SOTO
Batching algorithm
The communication interface to peripherals and higher-level host systems is dependent on the protocols supported by the master controller.
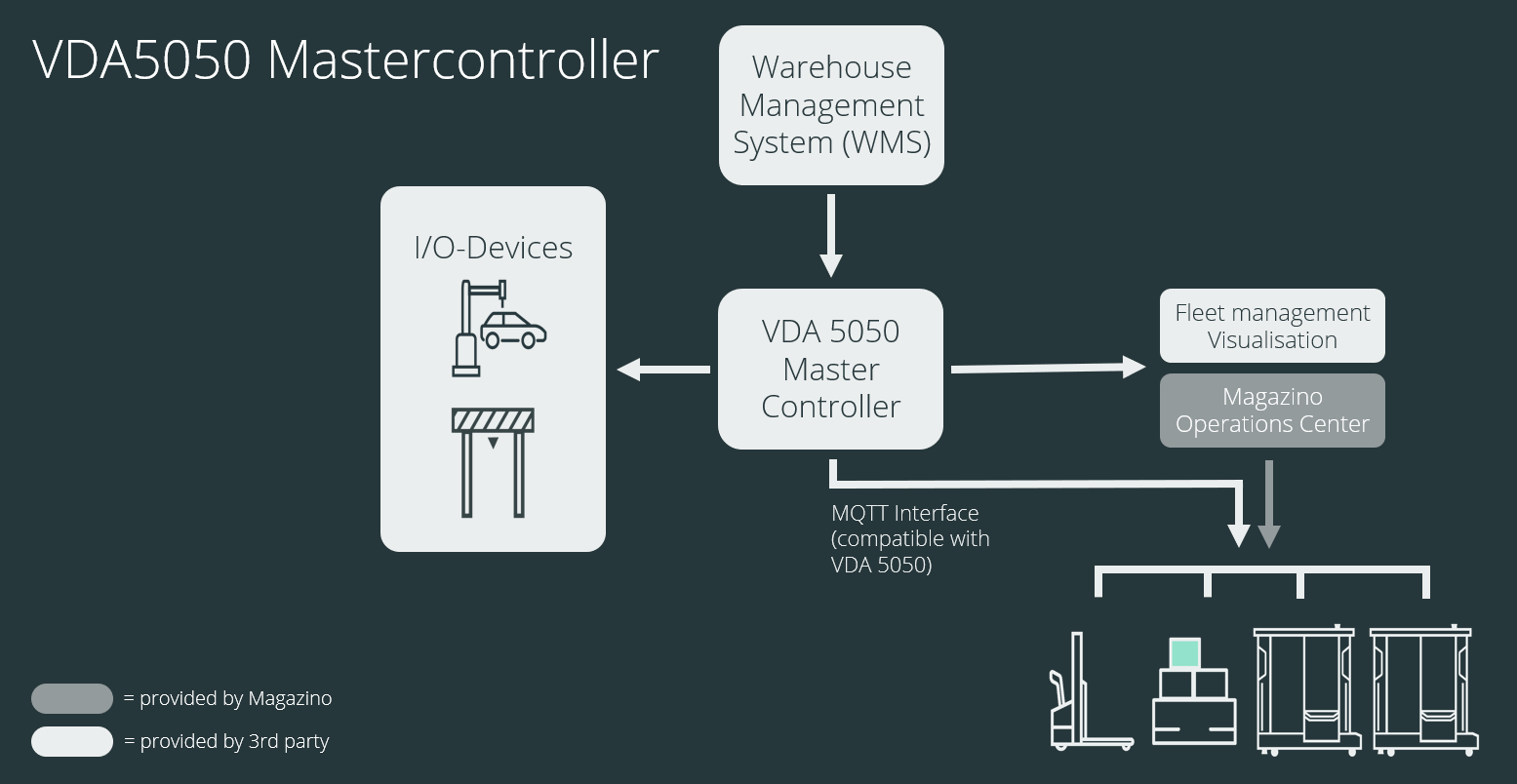
In any case, the Magazino Operations Center must be used for setting up a single SOTO or a fleet of SOTOs. The Magazino Operations Center is therefore always included in every SOTO offer.
The customer will not be able to view current and previous orders in the Magazino Operations Center when used with a third-party master controller. This needs to be provided by the third-party vendor.