
UT04 - Fehlerbehebung
Fehlerbehebung
Wann immer ein Fehler auftritt, benachrichtigt SOTO das Personal mit blinkenden roten LED-Lichtsignalen.
Wenn ein Fehler auftritt, wird die entsprechende Fehlerinformation auf dem SOTO-Display angezeigt. Um den Fehler zu beheben und den Betrieb fortzusetzen, folgen Sie den Anweisungen.
Alle SOTO-Fehlermeldungen werden in einem sogenannten "Tutorial" bereitgestellt:
 |
|
Häufige Fehler und Wiederherstellungsroutinen
Die wichtigsten Fehler und Tutorials zur Fehlerbehebung sind:
Blockiert mit Gegenstand im Greifer | Grund: Der Lastenträger auf dem Greifer befindet sich nicht in der richtigen Position. Lösung:: Positionieren Sie den Ladungsträger ordnungsgemäß und versuchen Sie es erneut. | 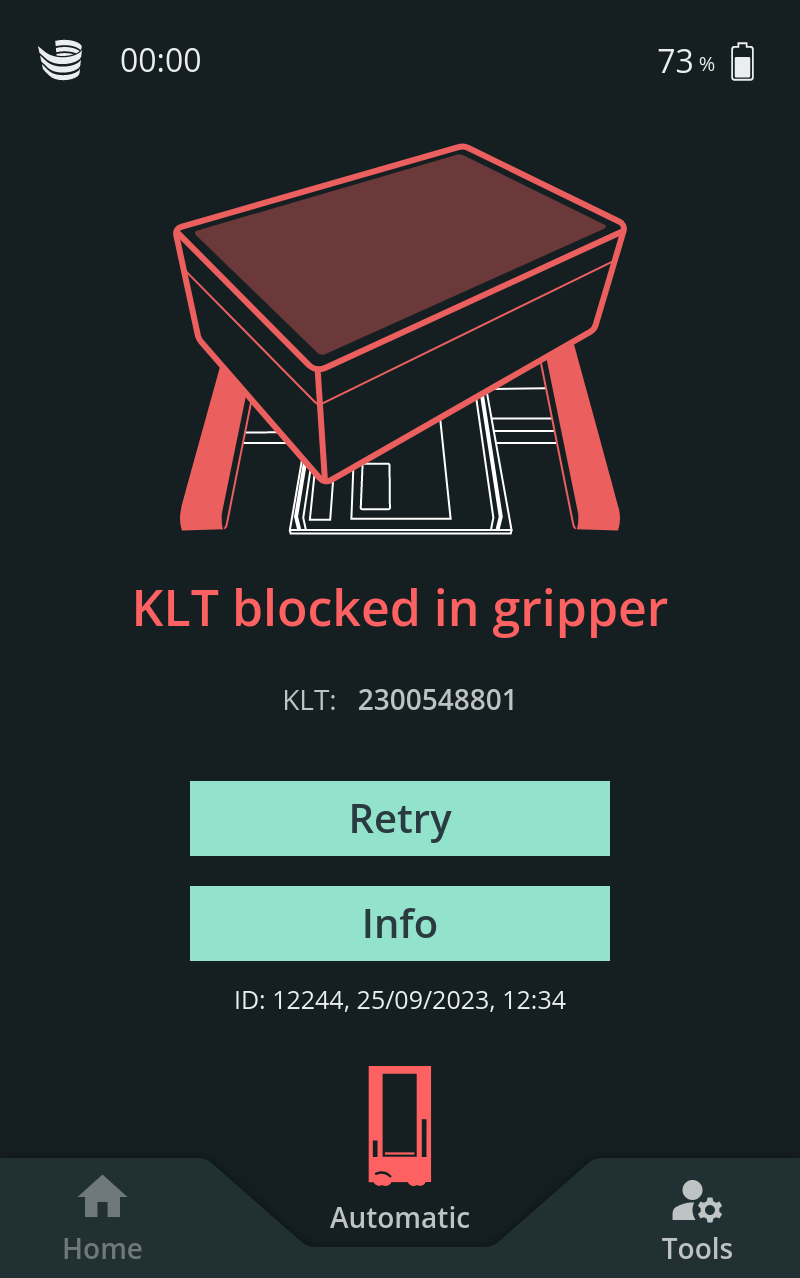 |
Roboter de-lokalisiert | Grund: SOTO hat die Lokalisierung verloren. Lösung: Fahren Sie den Roboter manuell zur Ladestation. Der Roboter wird versuchen, sich neu zu lokalisieren. Versuchen Sie es noch einmal. | 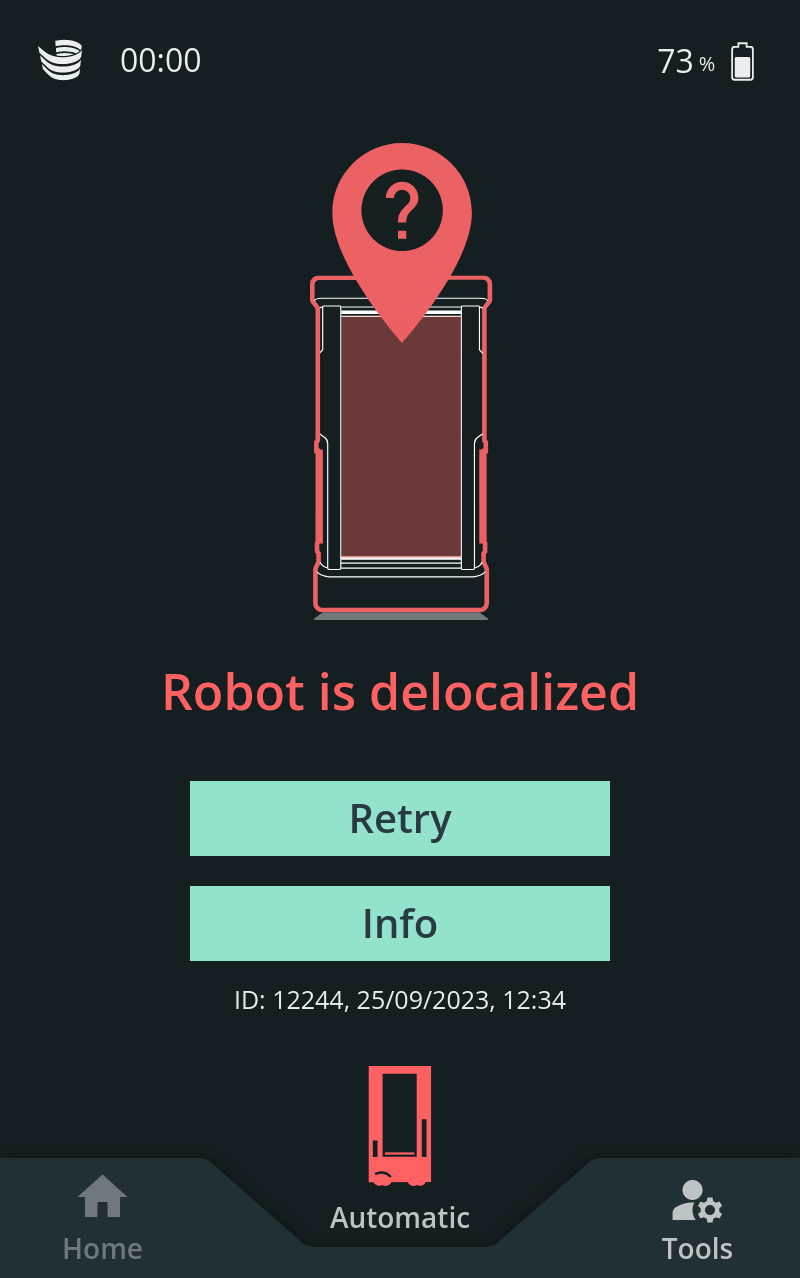 |
Greifer verletzt den Lichtvorhang | Grund: Der Greifer ragt aus dem Roboter heraus und verletzt den Lichtvorhang. Lösung: Betätigen Sie den Not-Halt-Taster. Schieben Sie den Greifer zurück in den Roboter. Achten Sie darauf, dass der Lastenträger auf dem Greifer bleibt; entfernen Sie ihn nicht. Entriegeln und quittieren Sie den Not-Halt-Taster, bestätigen Sie den Fehler auf dem Display und drücken Sie die Taste "Erneut versuchen". Wichtig: Der Abstand zwischen den beiden Bandgreifern muss gleich bleiben und der Lastenträger muss in der Mitte des Greifers positioniert werden. | 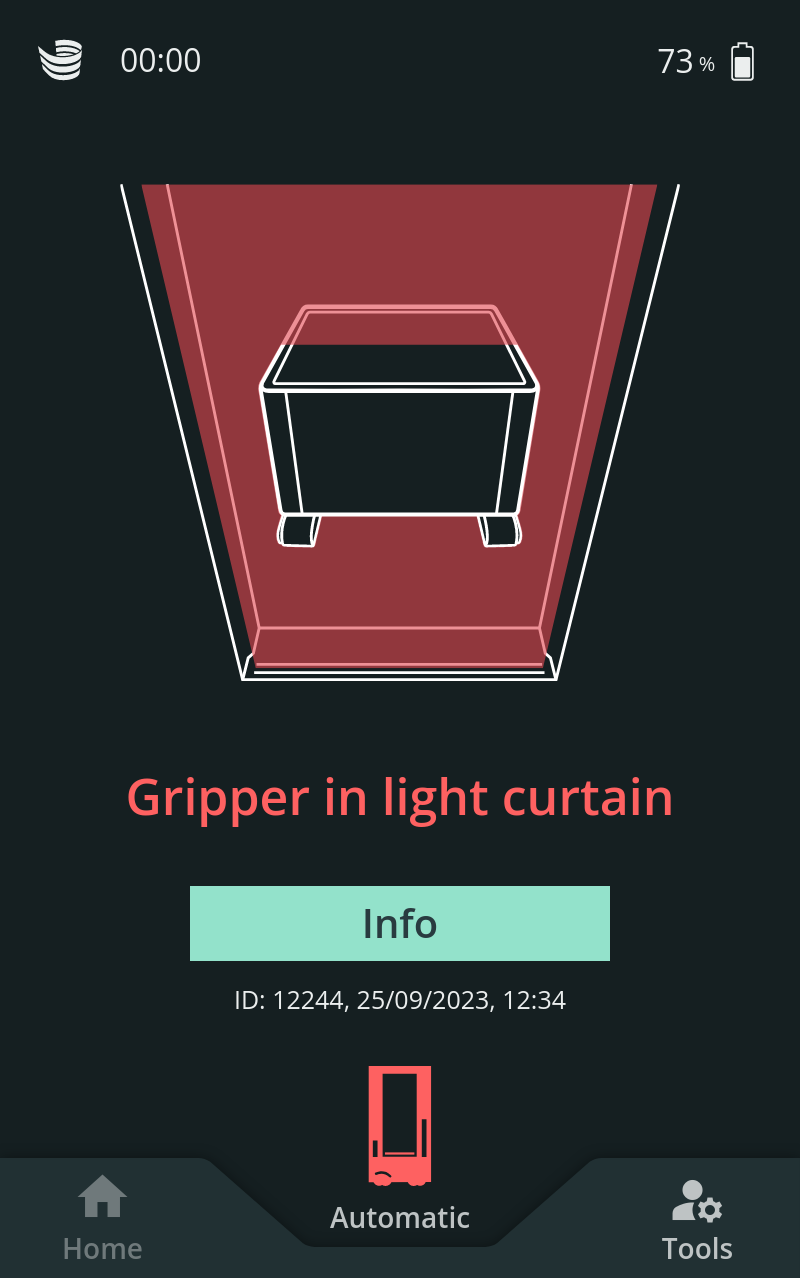 |
Überstrom | Grund: Der Greifer ist mit anderen Teilen des Roboters kollidiert. Lösung:
Wichtig: Der Abstand zwischen den beiden Bandgreifern muss gleich bleiben und der Lastenträger muss in der Mitte des Greifers positioniert werden. |  |
Ladegerät funktioniert nicht | Grund: Der Roboter wird nicht mit Strom versorgt. Lösung: Ziehen Sie das Ladekabel ab und warten Sie 10 Sekunden. Schließen Sie es wieder an, bestätigen Sie auf dem SOTO-Display und versuchen Sie es erneut. | 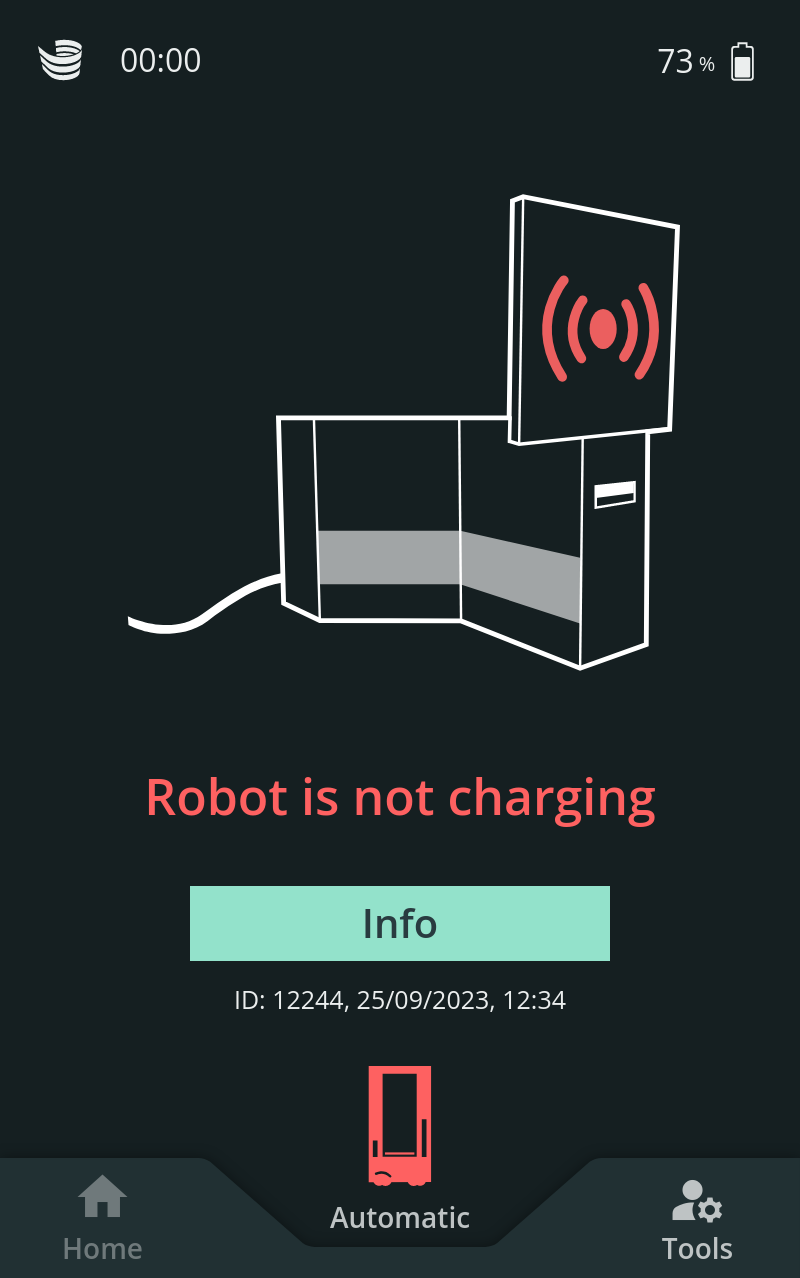 |
Andocken fehlgeschlagen | Grund: Der Roboter ist nicht in der Lage, an der Übergabestation anzudocken. Das kann beispielsweise daran liegen, dass ein Hindernis die Vorderseite des Regals blockiert oder der Roboter die Andockform nicht erkannt hat. Lösung: Entfernen Sie alle Hindernisse vor der Übergabestation und überprüfen Sie, ob die Andockform korrekt positioniert oder beschädigt ist. | 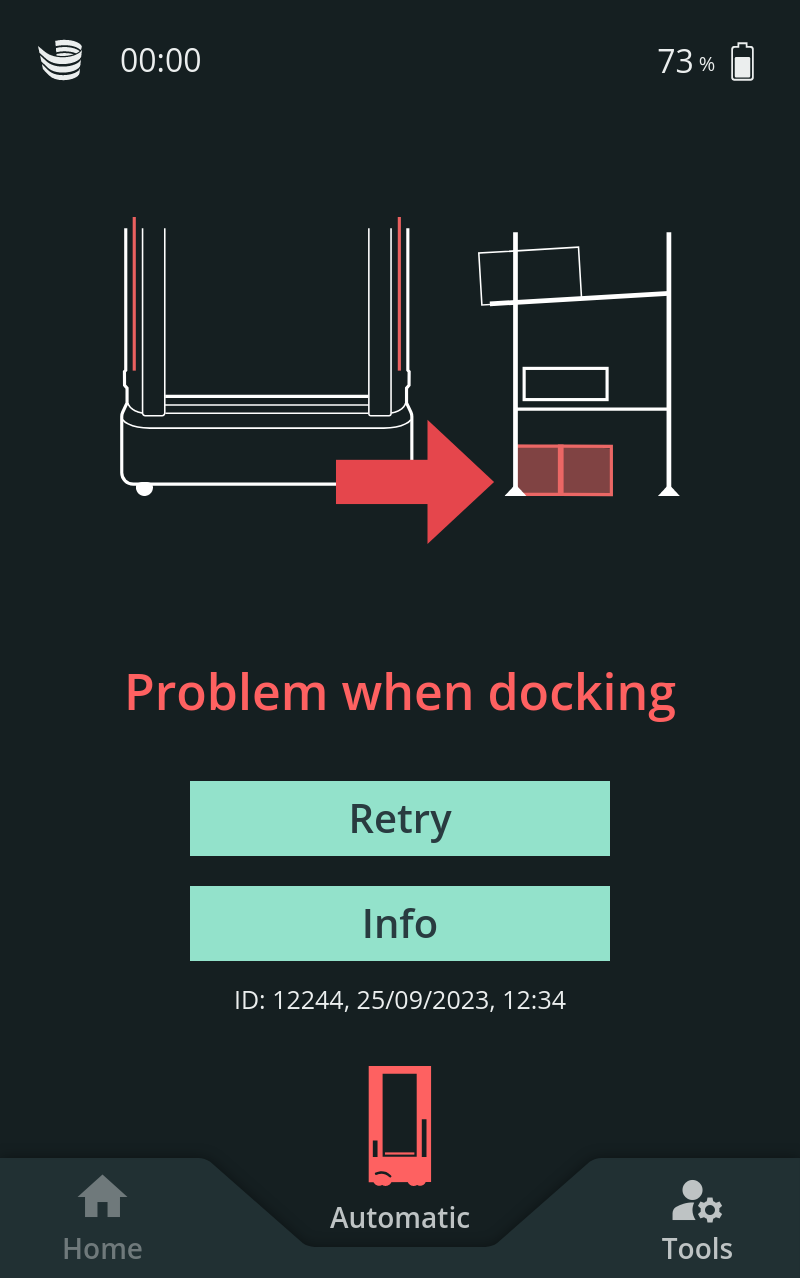 |
Adapter nicht erkannt | Grund: Der Adapter des Fachs wurde nicht erkannt. Dieses Problem tritt häufig aufgrund von beschädigten oder fehlenden Komponenten auf. Lösung: Vergewissern Sie sich, dass der Adapter alle notwendigen Angaben enthält, wie den QR-Code und den Reflektorbandstreifen. Vergewissern Sie sich, dass der Name des Fachs mit dem im Sammeltransportauftrag angegebenen Namen übereinstimmt. Drücken Sie dann auf "Erneut versuchen". | 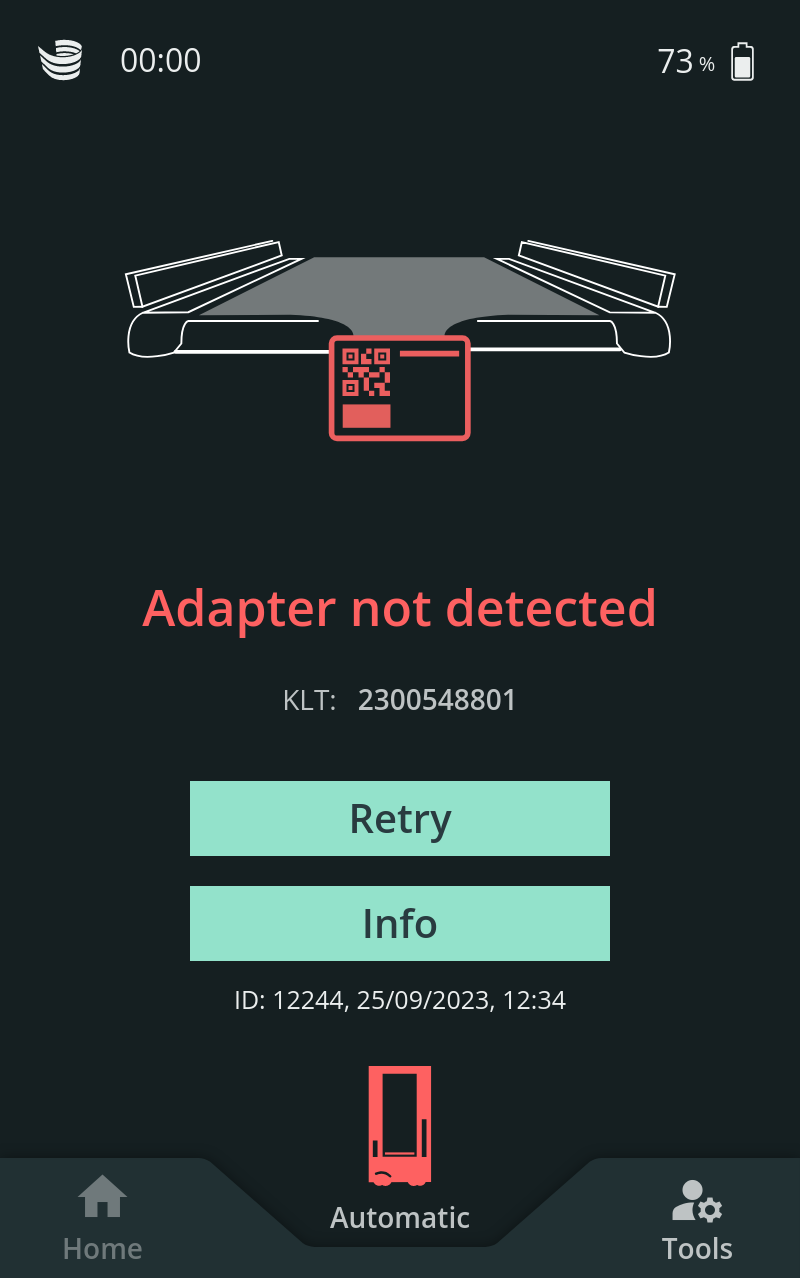 |
Fach nicht erreichbar | Grund: Der Raum im Fach ist möglicherweise blockiert. Lösung: Stellen Sie sicher, dass keine Gegenstände den Zugang zum Fach blockieren. Drücken Sie dann auf "Erneut versuchen". |  |
Ladungsträger nicht gefunden | Grund: Der vorgesehene Ladungsträger befindet sich entweder nicht dort, wo der Roboter ihn erwartet, oder das Etikett des Ladungsträgers ist unleserlich. Lösung: Überprüfen Sie die Position des Lastenträgers und positionieren Sie ihn richtig. Achten Sie darauf, dass der Strichcode gut sichtbar ist. Drücken Sie dann auf "Erneut versuchen". | 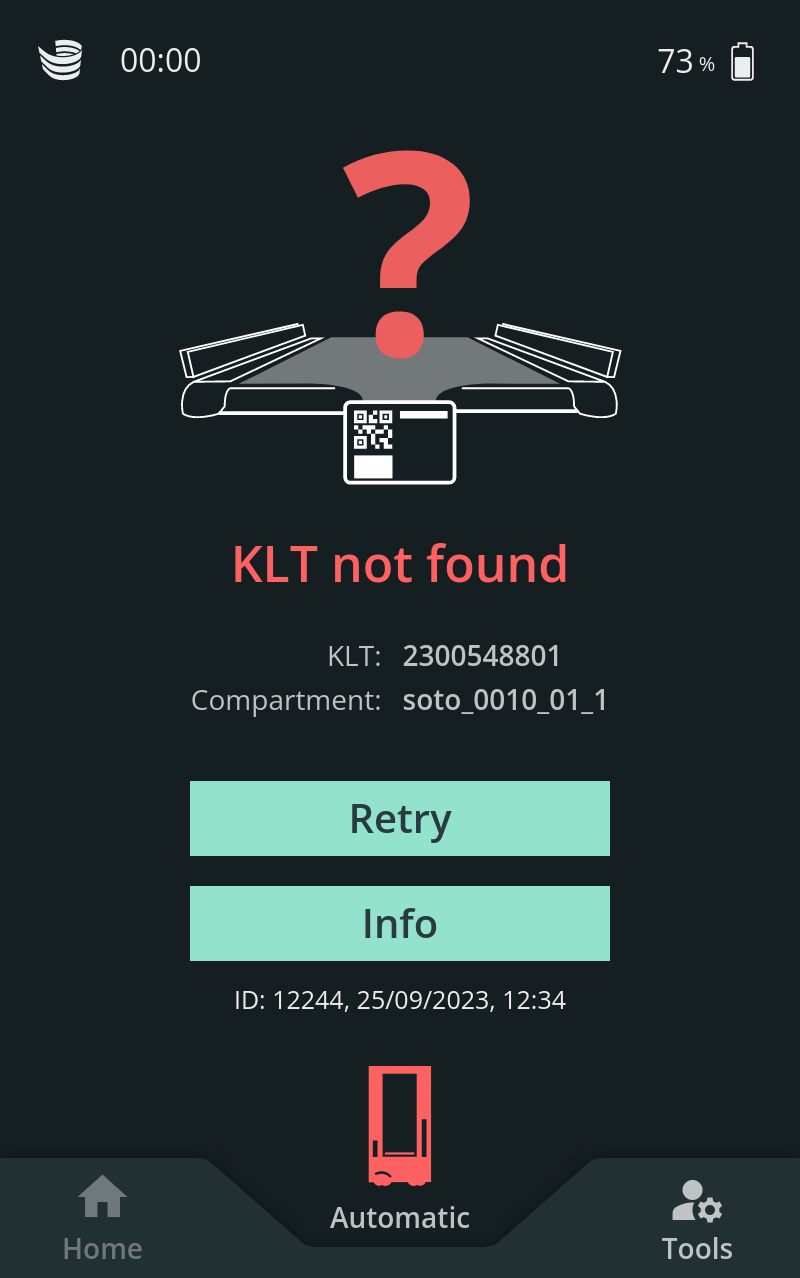 |
Ladungsträger nicht auf dem Greifer erkannt | Grund: Der Ladungsträger wurde möglicherweise während des Lasthandlings manuell entfernt. Lösung: Überprüfen Sie die Position des Lastenträgers auf dem Greifer und positionieren Sie ihn richtig. Drücken Sie dann auf "Erneut versuchen". |  |
Objekt nicht erreichbar | Grund: Der Greifer ist nicht in der Lage, den Ladungsträger zu greifen. Lösung: Überprüfen Sie, ob der Lastenträger richtig in das Fach eingeschoben ist. Positionieren Sie ihn neu oder drehen Sie ihn, wenn er nicht richtig platziert ist. Drücken Sie dann auf "Erneut versuchen". | |
Objekt nicht greifbar | Grund: Der Greifer ist nicht in der Lage, den Ladungsträger zu greifen. Lösung: Überprüfen Sie, ob der Ladungsträger richtig in das Fach eingeschoben ist. Positionieren Sie den Ladungsträger neu oder drehen Sie ihn, wenn er nicht richtig positioniert ist. Drücken Sie dann auf "Erneut versuchen". |  |
Pfad zum Ziel blockiert | Grund: Ein Hindernis blockiert den Weg des Roboters. Lösung: Entfernen Sie das Hindernis. Der Roboter wird automatisch weiterfahren. | 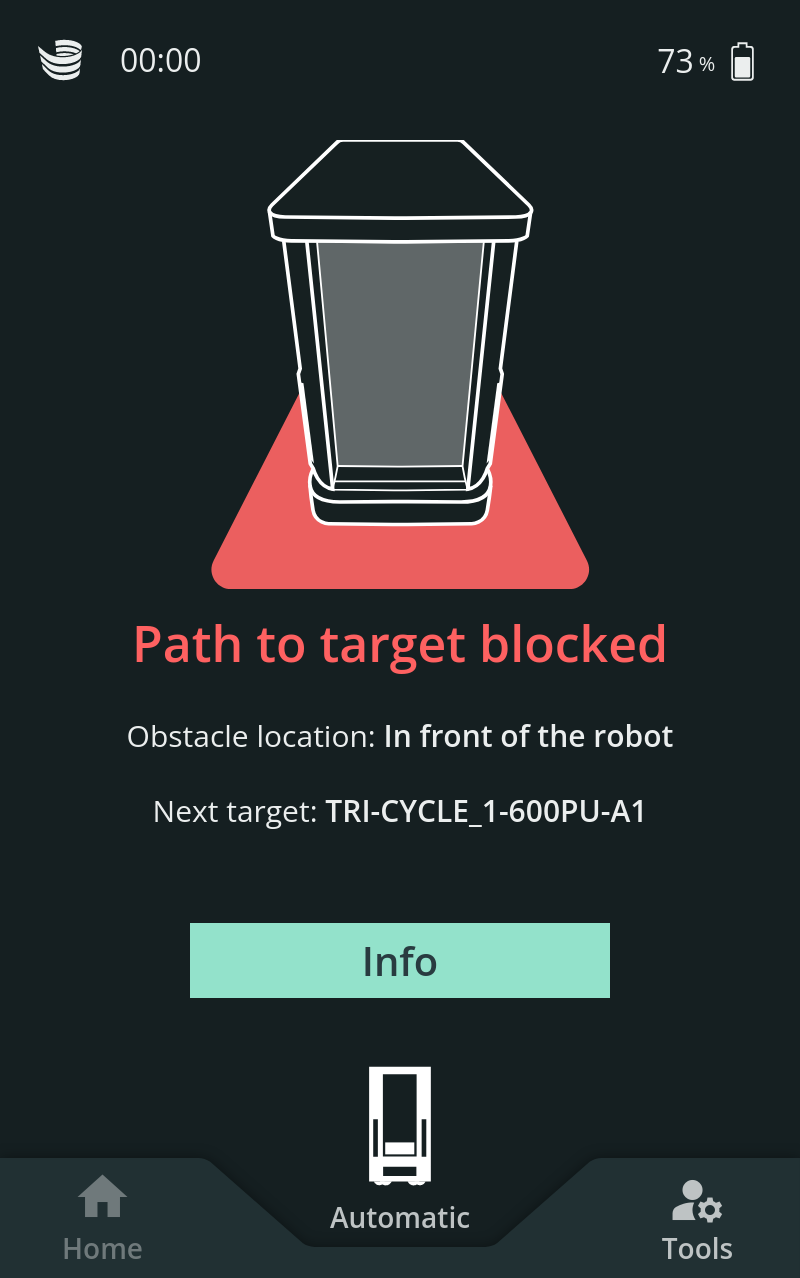 |
Oberer Laserscanner eingeklappt | Grund: Der obere Laserscanner ist eingeklappt und kann nicht verwendet werden. Lösung: Klappen Sie den oberen Laserscanner über dem Greifer aus. | 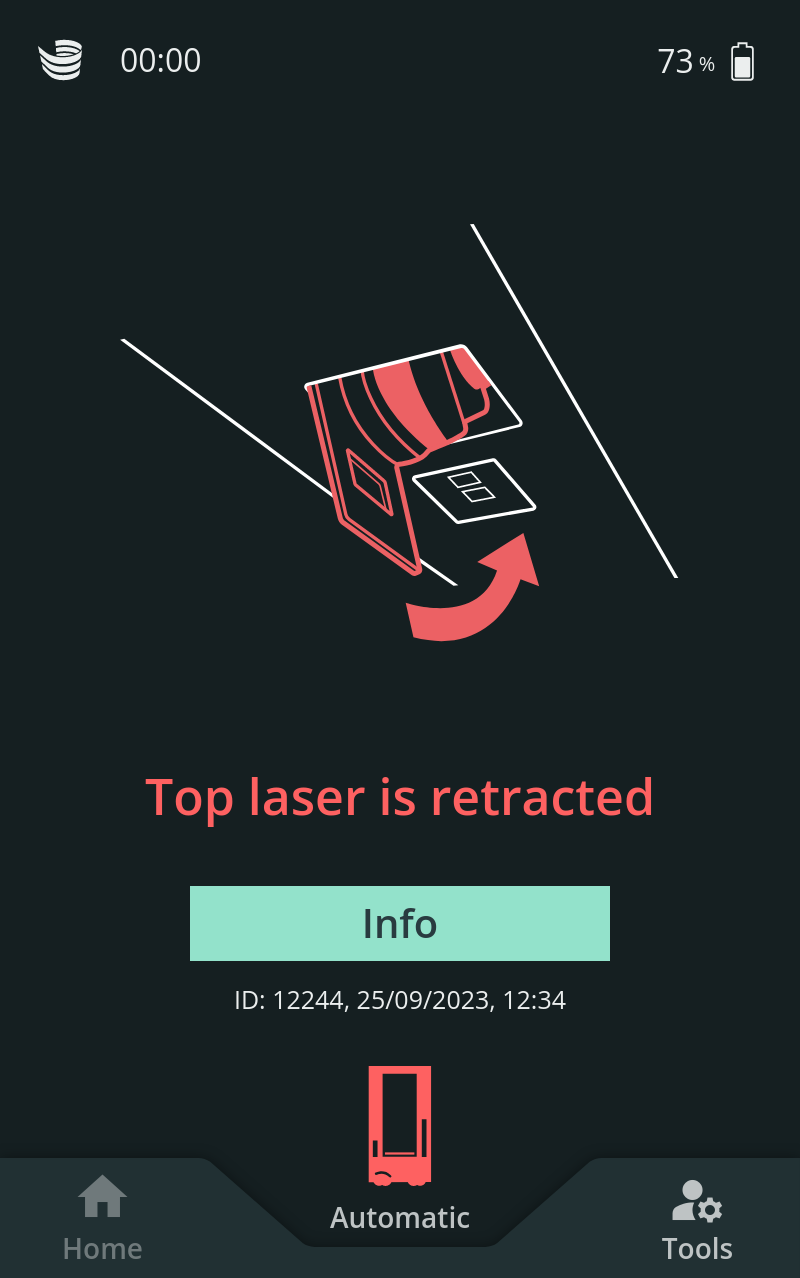 |
Roboter nicht betriebsbereit | Grund: Der Not-Halt-Taster wurde betätigt und/oder der Lichtvorhang wurde ausgelöst. Lösung: Entfernen Sie alle Gegenstände, die die Lichtvorhänge behindern und bestätigen Sie dies auf dem Display. Entriegeln Sie dann alle Not-Halt-Taster und betätigen Sie den Quittiertaster. | 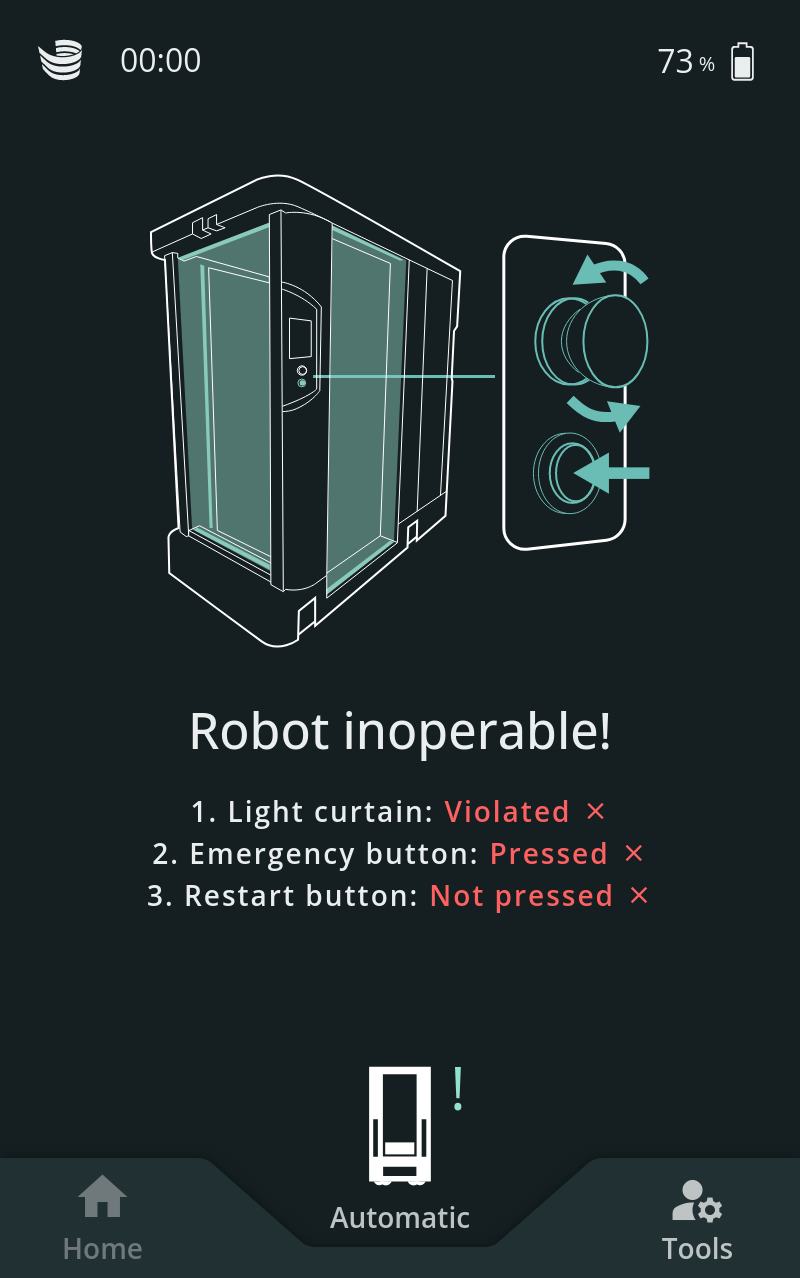 |
Roboter überhitzt | Grund: Der Roboter hat eine kritische Temperatur erreicht und muss abkühlen. Lösung: Der Roboter ist außer Betrieb. Navigieren Sie zum Abschnitt "Tools", um den Support zu kontaktieren. Wichtig: Der Betrieb des Roboters außerhalb seiner Temperaturspezifikation kann zu Schäden am System führen. | 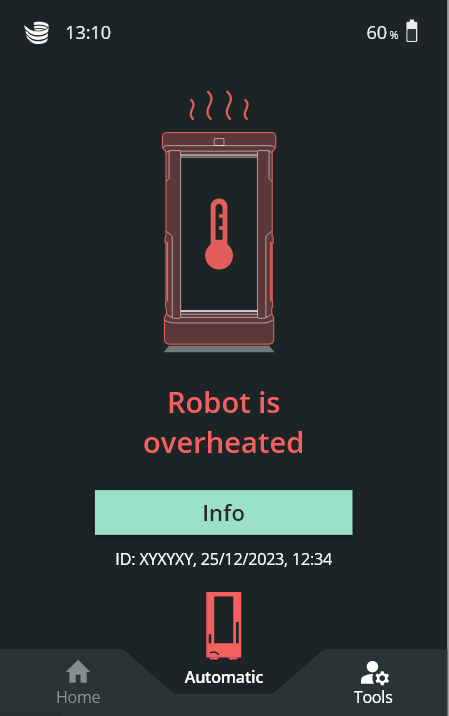 |
Interner Fehler | Grund: Unbekannter Fehler in der Software. Lösung: Folgen Sie den Anweisungen auf dem Bildschirm und drücken Sie auf "Erneut versuchen" oder navigieren Sie zum Abschnitt "Tools", um den Support zu kontaktieren. | .png?inst-v=623fd237-c9af-448b-8290-279da381d7b9) |
Hardware-Fehler (Software-Neustart) | Grund: Unbekanntes Hardware-Problem. Lösung: Versuchen Sie, die Software neu zu starten. Wenn der Fehler weiterhin besteht, starten Sie den Roboter im Abschnitt "Tools" neu. |  |
Hardwarefehler (Neustart des Roboters) | Grund: Unbekanntes Hardware-Problem. Lösung: Versuchen Sie, den Roboter neu zu starten.
Wenn der Fehler weiterhin besteht, navigieren Sie zum Abschnitt "Tools", um den Support zu kontaktieren. | 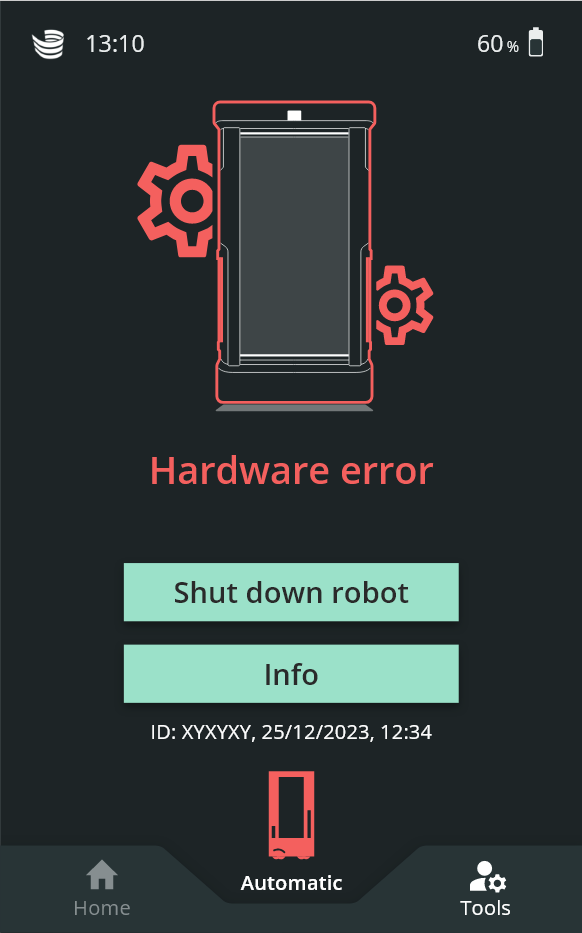 |
Systemfehler | Grund: Der Roboter hat einen Systemfehler. Lösung: Versuchen Sie, das System neu zu starten. Wenn der Fehler weiterhin besteht, navigieren Sie zum Abschnitt "Tools", um den Support zu kontaktieren. | 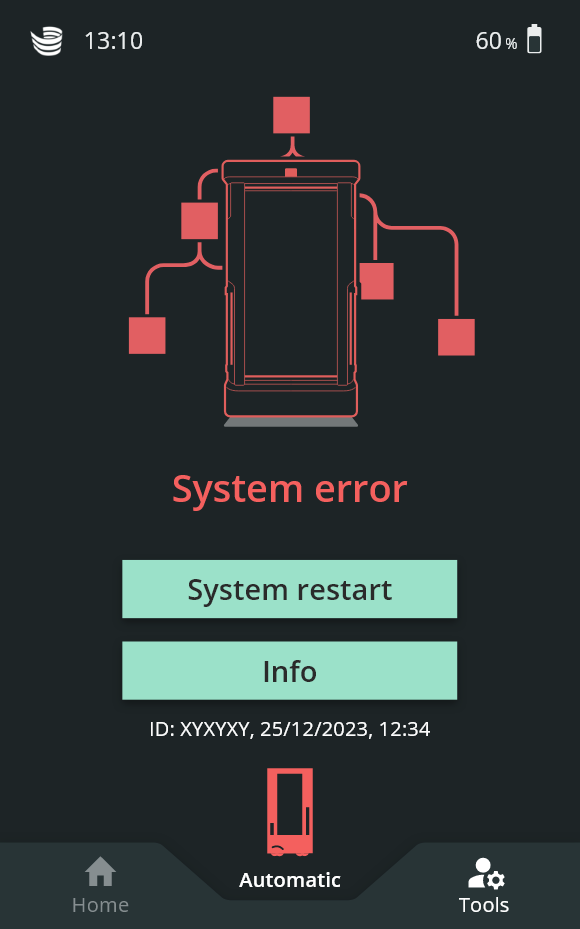 |
Zugangsverwaltung
Der Zugriff auf erweiterte Tools zur Fehlerbehebung, Robotereinstellungen und Roboterinbetriebnahmefunktionen ist eingeschränkt.
Pin
Geben Sie Ihre PIN ein, um auf erweiterte Tools zur Fehlerbehebung zuzugreifen und den Robotermodus zu ändern.
Stellen Sie sicher, dass der PIN nur autorisiertem Personal bekannt ist.
Allgemeine SOTO-Display Tools
SOTO bietet auch ein optionales Set von Tools an, die zur Wiederherstellung des Roboters verwendet werden können.

Tools
Sie können den Bereich "Tools" aufrufen, indem Sie auf die Schaltfläche "Tools" in der unteren rechten Ecke des SOTO-Displays drücken.
Einige der Tools sind nur verfügbar, wenn der Roboter einen aktiven Sammeltransportauftrag und einen aktiven Fehler hat.
Liegt kein Auftrag oder Fehler vor, werden die nicht verfügbaren Werkzeuge ausgeblendet.
Manueller Eingriff in Sammeltransportaufträge
Es gibt auch die Möglichkeit, einen aktiven Sammeltransportauftrag zu überschreiben, um ein Problem zu lösen:
Auftrag manuell abschließen | Der aktuelle Transportauftrag wird manuell abgeschlossen. Der Bediener muss den Lastenträger manuell in das Zielfach bringen. Orientieren Sie sich an den Informationen auf dem SOTO-Display, um das Zielfach zu identifizieren. | 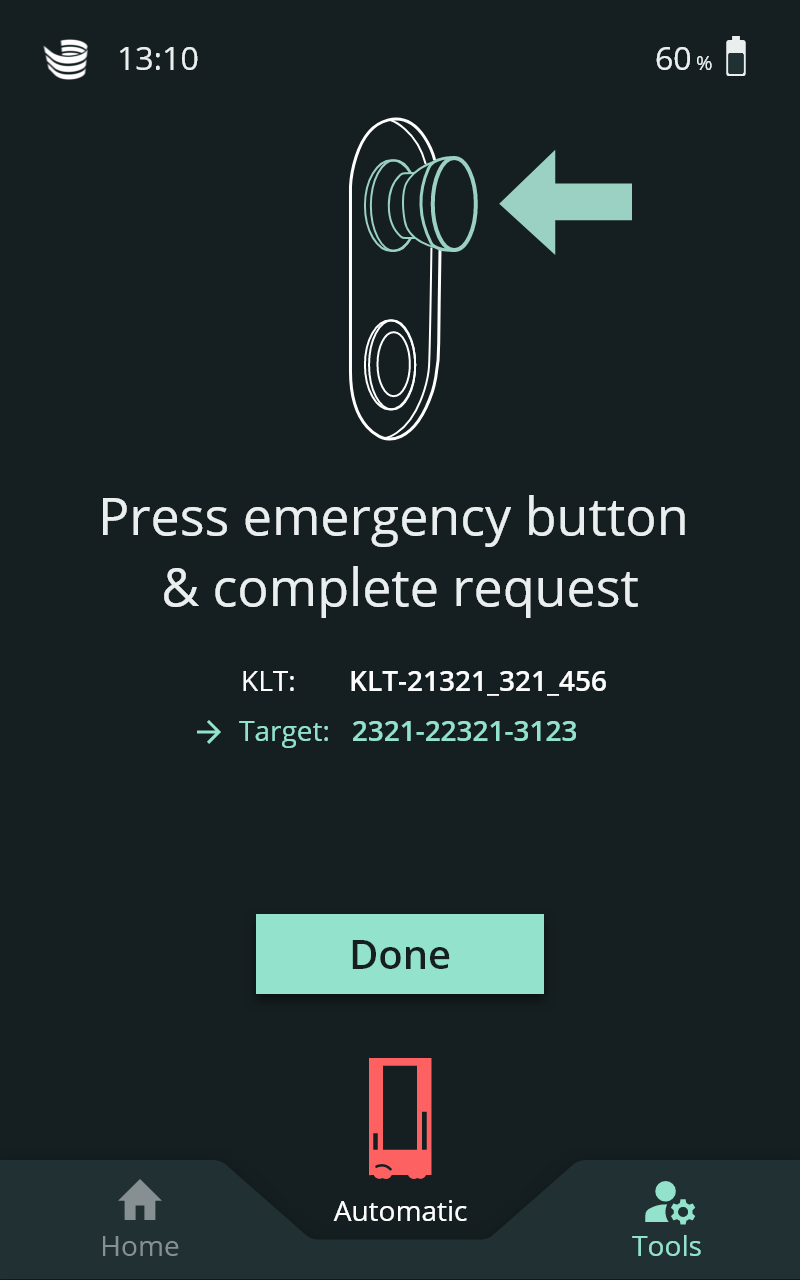 |
Auftrag manuell abbrechen | Der aktuelle Transportauftrag wird manuell abgebrochen. | 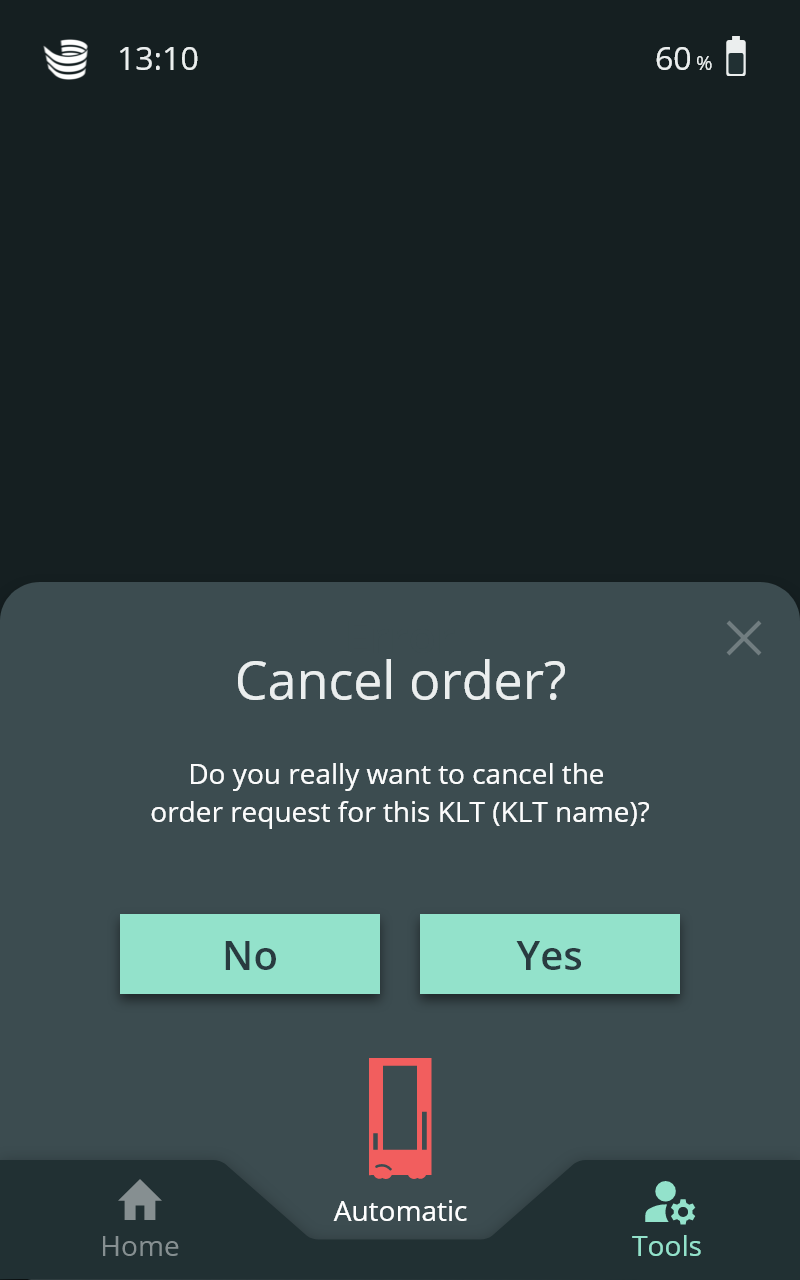 |
System zurücksetzen
Wenn alle Wiederherstellungsversuche fehlschlagen, gibt es die Möglichkeit, das System zurückzusetzen. Diese Aktion löscht alle aktiven Fehler und Sammeltransportaufträge. Das Zurücksetzen kann auf zwei Arten erfolgen:
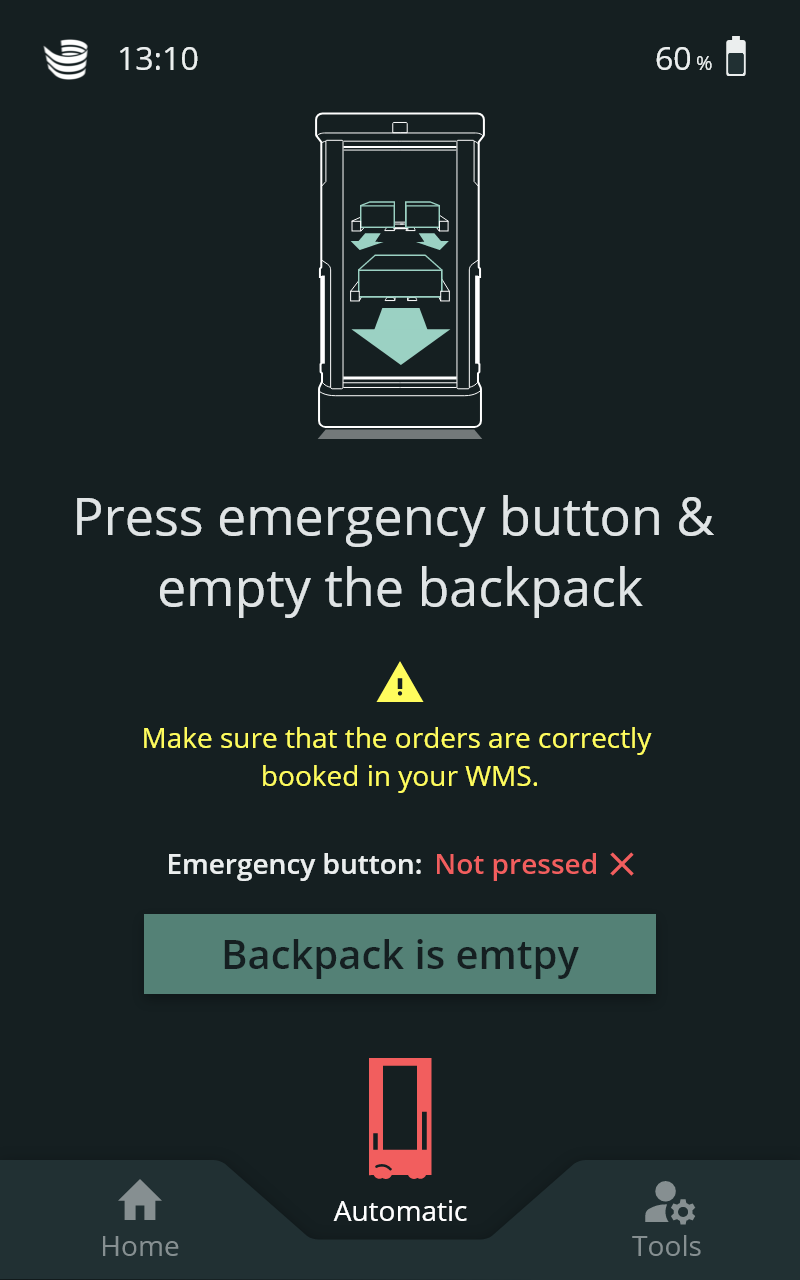 | Der Roboter löscht alle seine Sammeltransportaufträge und alle Fehler werden automatisch bestätigt. Der Bediener muss alle Lastenträger manuell aus dem Backpack entfernen. Bitte stellen Sie sicher, dass Sie alle potenziellen Konflikte mit den WMS-Buchungen manuell auflösen! | Roboter zurücksetzen |
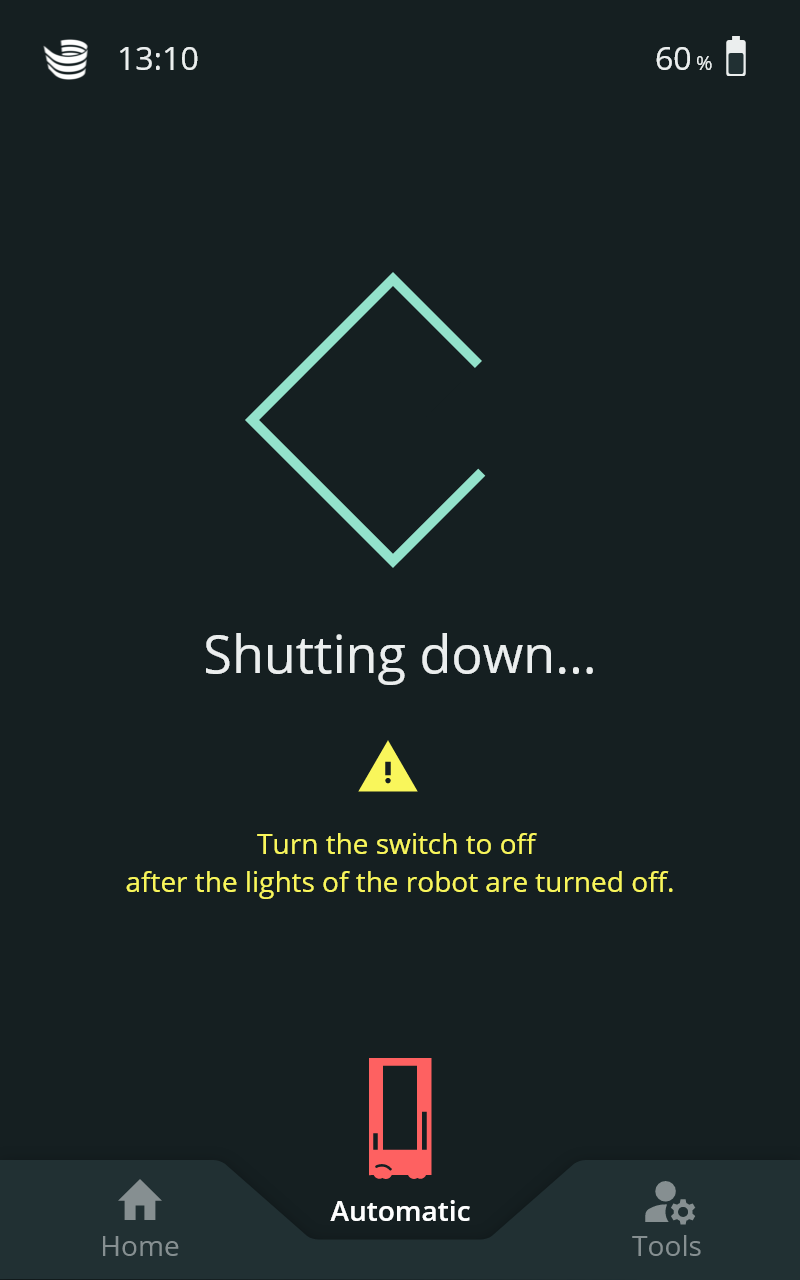 | Der Roboter ist vollständig ausgeschaltet. Bitte drehen Sie den "Ein/Aus"-Schalter, wenn der Roboter vollständig heruntergefahren ist (LEDs und SOTO-Display sind ausgeschaltet). Bitte warten Sie 10 Sekunden, bevor Sie SOTO wieder einschalten. | Roboter herunterfahren |
Robotereinstellungen
Im Bereich Robotereinstellungen finden Sie alle wichtigen Informationen über den Roboter, seine Softwarekomponenten und deren Status.
Name und Modell
Softwareversionen
Aktive Umgebung
Verbindungsstatus
Sie können die Systemsprache bei Bedarf in den Robotereinstellungen ändern.
Sensorfeldverfolgung
Wenn ein Schutzfeld ausgelöst wird und die Ursache nicht sofort klar ist, bietet das SOTO-Display weitere Hilfe.
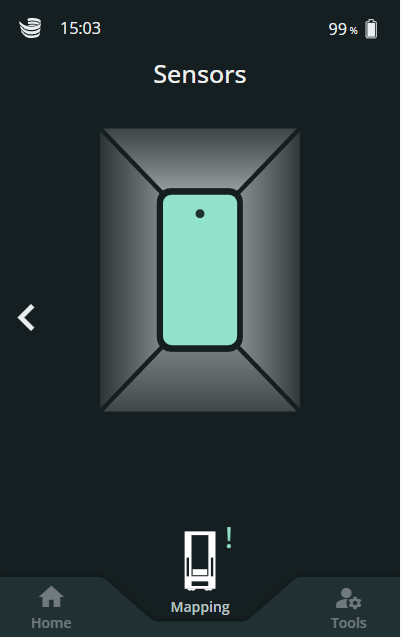 | Das SOTO-Display zeigt den Status des kleinen Schutzfeldes an. Sobald eines oder mehrere Sektionen des kleinen Schutzfeldes verletzt werden, wird das entsprechende Feld gelb hervorgehoben. | Sensoren |
Re-Lokalisierung
In manchen Fällen erkennt SOTO seine genaue Position innerhalb des Gebäudes nicht, weil die Lokalisierung verloren gegangen ist. In diesem Fall ist eine manuelle Re-Lokalisierung erforderlich. Dies erfolgt durch manuelles Zurückfahren des Roboters zu seiner Ladestation. Sobald der Roboter wieder an der Ladestation steht, lokalisiert er sich automatisch neu und bereinigt den Fehler.
Eine Re-Lokalisierung ist oft erforderlich, wenn Sie vom manuellen oder Kartierungsmodus in den automatischen Modus wechseln.
Bewegen des Roboters im manuellen Modus
SOTO kann manuell verfahren werden, indem man den Roboter in den manuellen Modus wechselt.
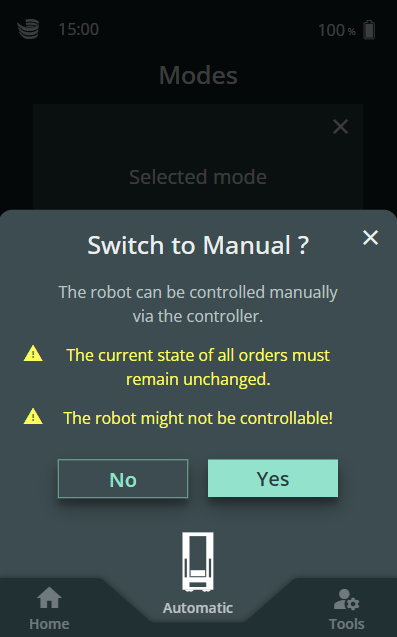
Um den Betriebsmodus zu wechseln, klicken Sie auf die Moduswahltaste in der unteren Mitte des SOTO-Displays (großes SOTO-Symbol).
Wenn sich noch aktive Sammeltransportaufträge im Backpack befinden, ändern Sie bitte nicht den Zustand und die Position der Ladungsträger.
SOTO kann mit einem handgehaltenen Controller ferngesteuert werden. Der Controller wird in einer Halterung in der Rückseite der Drivebase aufbewahrt.

Sobald Sie das Steuergerät aus der Halterung genommen haben, müssen Sie es an SOTO anschließen. Die Verbindung kann über die Schaltfläche "Start" auf dem Controller hergestellt werden. Wenn die Verbindung erfolgreich war, erscheint ein grünes Controller-Symbol in der Kopfzeile des SOTO-Displays.

Der Roboter kann nun mit dem Controller gesteuert werden. Navigieren Sie den Roboter zu seiner gewünschten Zielposition.
Die Höchstgeschwindigkeit des Roboters ist standardmäßig auf 0,3 m/s eingestellt.
Taste | Funktion |
Start | Initiiert die Verbindung mit SOTO (Voraussetzung USB-Dongle angeschlossen) |
Linker Hebel | Translationssteuerung, bewegt den Roboter in X- und Y-Richtung, ohne seine Orientierung zu verändern |
Rechter Hebel | Rotationssteuerung, ändert die Ausrichtung des Roboters durch Drehung um seinen Mittelpunkt |
LB | Reduzierte Geschwindigkeit, der Roboter reduziert seine Geschwindigkeit auf 0,05 m/s |
RB | Höchstgeschwindigkeit, der Roboter beschleunigt auf 1,5 m/s |
Mode | Muss deaktiviert sein, LED aus |
XID/HID-Schalter | D-X-Kippschalter an der Vorderseite des Controllers, muss auf X gestellt werden |
Fahren Sie immer mit reduzierter Geschwindigkeit, wenn Sie den Roboter in die Nähe von Hindernissen bewegen, die von den Laserscannern nicht erkannt werden können - insbesondere die Ladestation.
Die Schutzfelder bleiben im manuellen Modus aktiv. Der Roboter reduziert automatisch seine Geschwindigkeit, wenn die Schutzfelder durch umliegende Hindernisse verletzt werden. Beachten Sie, dass die unteren Laserscanner nur Hindernisse in 0,12 m Höhe erkennen.
Nachdem Sie den Roboter an die gewünschte Stelle manövriert haben, trennen Sie den Controller und legen ihn in seine Halterung zurück. Vergewissern Sie sich beim Verstauen des Controllers, dass er wieder sicher in der Halterung einrastet.
Um den normalen Betrieb wieder aufzunehmen, schalten Sie SOTO wieder in den automatischen Modus.