
UT03 - Sicherheitsunterweisung
Vorwort
In diesem Dokument werden die folgenden Arten von Sicherheitshinweisen verwendet:
.png?inst-v=623fd237-c9af-448b-8290-279da381d7b9) | Gefahr! |
|---|---|
Gefahr beschreibt eine Gefährdung, die, wenn sie nicht vermieden wird, zum Tod oder zu irreversiblen Verletzungen führt. |
| Warnung! |
|---|---|
Warnung beschreibt eine Gefährdung, die, wenn sie nicht vermieden wird, zum Tod oder zu irreversiblen Verletzungen führen kann. |
| Vorsicht! |
|---|---|
Vorsicht beschreibt eine Gefährdung, die, wenn sie nicht vermieden wird, zu leichten Verletzungen führen kann. |
 | Hinweis! |
|---|---|
Hinweis beschreibt eine Gefahr, die, wenn sie nicht vermieden wird, zu Schäden an der Maschine führen kann. |
Allgemeine Sicherheitsrichtlinien
Wann immer Sie sich in einem SOTO-Arbeitsbereich aufhalten, beachten Sie die folgenden Grundsätze:
Verwenden Sie nur SOTO in gutem Zustand. Nehmen Sie den Roboter aus dem Betrieb, wenn Sie Schäden an Roboterkomponenten feststellen. Wenden Sie sich an den zuständigen Vorgesetzten oder an Magazino.
Achten Sie immer auf den Roboter, wenn Sie sich in seiner Nähe befinden.
SOTO ist mit Sicherheitseinrichtungen ausgestattet, die Ihre Sicherheit gewährleisten, wie in diesem Modul beschrieben. Stellen Sie dies jedoch nicht unnötig auf die Probe. Gehen Sie den Robotern nach Möglichkeit aus dem Weg.
Wenn Sie in Wege mit eingeschränkter Sicht entlang des Weges eintreten, achten Sie auf den Bluespot.
Wenn Sie sich unsicher sind oder sich in irgendeiner Weise bedroht fühlen, betätigen Sie den Not-Halt-Taster. Diese sind dazu bestimmt, benutzt zu werden.
Wenn Sie im Arbeitsbereich des Roboters eine Verschmutzung des Bodens - z.B. durch verschüttete Flüssigkeiten - feststellen, entfernen Sie die Verschmutzung, bevor Sie den Betrieb durch SOTO fortsetzen.
Der Roboter kann nur Hindernisse ab einer bestimmten Größe innerhalb von bestimmten Positionen erkennen. Entfernen Sie Hindernisse mit kleinem Durchmesser auf dem Boden oder in der Höhe aus dem Weg des Roboters. Wenn Sie Zweifel haben, ob ein bestimmtes Hindernis vom Roboter erkannt werden kann, erkundigen Sie sich bei Ihrem Vorgesetzten. Übliches Beispiel: Abgelegte Gabeln von Gabelstaplern oder Handhubwagen.
| Warnung! |
|---|---|
Verletzungsgefahr! Personen können von herabfallenden Ladungsträgern erfasst werden. Vermeiden Sie den Gefahrenbereich an Übergabestationen. |
| Warnung! |
|---|---|
Verletzungsgefahr! Im Falle eines Fehlers kann es notwendig sein, die Ladungsträger manuell aus dem Roboter zu entfernen. Halten Sie sich an die Empfehlungen für das sichere Heben und Tragen von Lasten. |
| Warnung! |
|---|---|
Verletzungsgefahr! Schalten Sie den Roboter vor jeder Reparatur oder Reinigung über den Hauptschalter aus. |
| Vorsicht! |
|---|---|
Verletzungsgefahr! Personen können durch das Durchlaufregal hindurchgreifen und sowohl bewegliche Teile des Greifers als auch den Ladungsträger während der Aufnahme und Abgabe erreichen. |
| Hinweis! |
|---|---|
Laserklasse 1 nach DIN EN 60825-1:2003-10. |
Warnhinweise
Warnschilder, die auf eine potenzielle Quetschgefahr für Gliedmaßen hinweisen, sind an allen Öffnungen gut sichtbar angebracht.
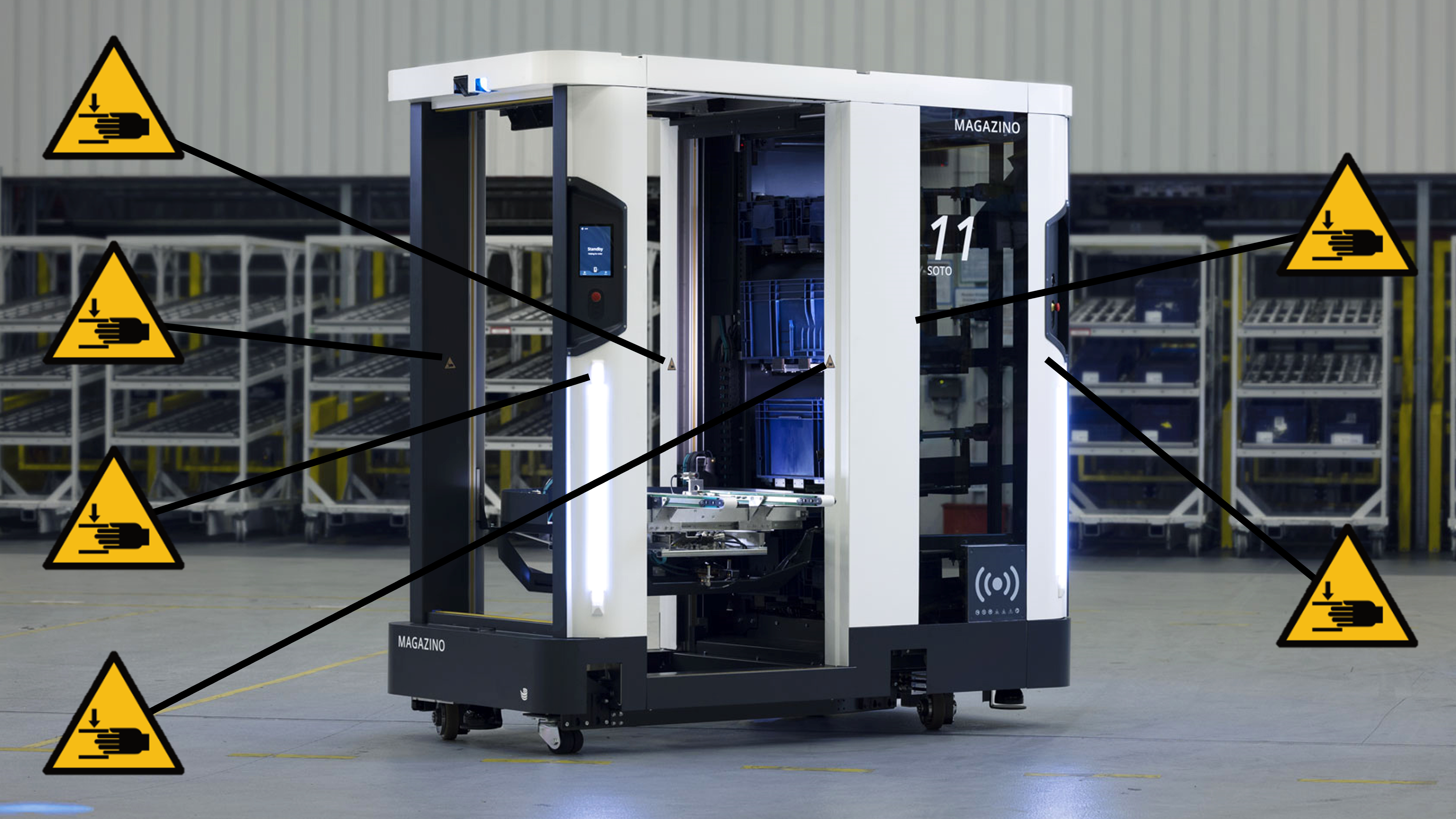
| Vorsicht! |
|---|---|
Verletzungsgefahr! Personen können in den Roboter greifen und mit den beweglichen Teilen des Greifers oder des Backpacks in Berührung kommen. |
| Hinweis! |
|---|---|
Der Roboter darf nur mit angebrachten Warnschildern betrieben werden. Kontaktieren Sie Magazino, wenn beschädigte oder entfernte Warnschilder ersetzt werden müssen. |
Sicherheitskonzept
Das Sicherheitskonzept des Roboters gewährleistet einen sicheren, autonomen Betrieb neben dem Menschen. Der Einsatz von bewährten Sicherheitskomponenten in Verbindung mit einer Sicherheitssteuerung sorgt dafür, dass sich der Roboter im automatischen Betrieb stets in einem sicheren Zustand befindet.
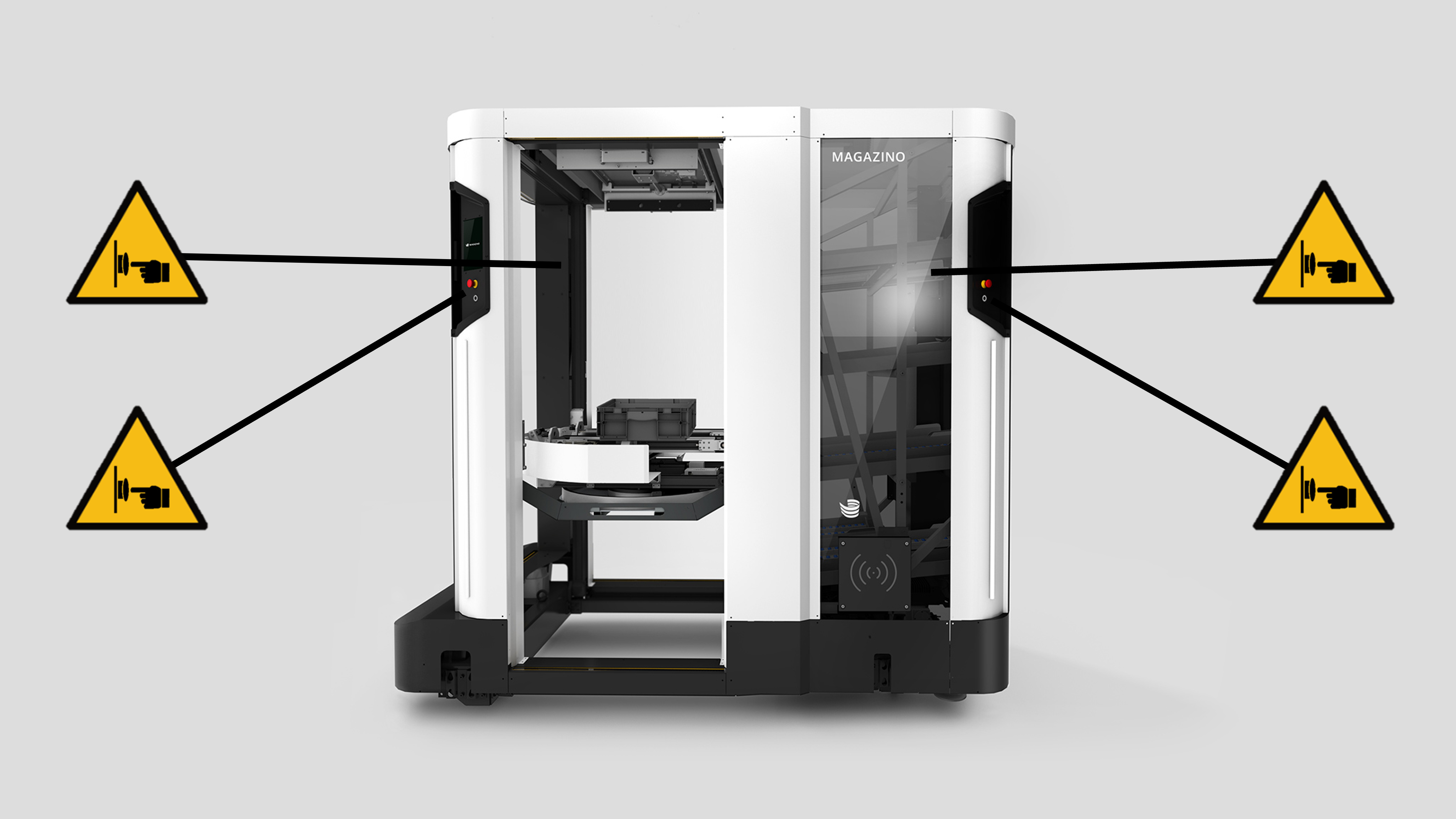
Not-Halt-Taster
Die Betätigung eines Not-Halt-Tasters führt zum sofortigen Stopp aller gefährlichen Roboterbewegungen.

An allen vier Ecken des Roboters befinden sich insgesamt vier Not-Halt-Taster, die immer in Reichweite eines Arms sind.
Die Not-Halt-Taster funktionieren wie folgt:
Drücken Sie die Not-Halt-Taste. Der Roboter stoppt alle gefahrbringenden Bewegungen.
Entriegeln Sie den Not-Halt-Taster, um den Roboter wieder in Betrieb nehmen zu können. Drehen Sie den Not-Halt-Taster in eine beliebige Richtung, bis sich der Taster entriegelt.
Drücken Sie die Bestätigungstaste (unterhalb des Not-Halt-Tasters), um den Roboter wieder in Betrieb zu nehmen.
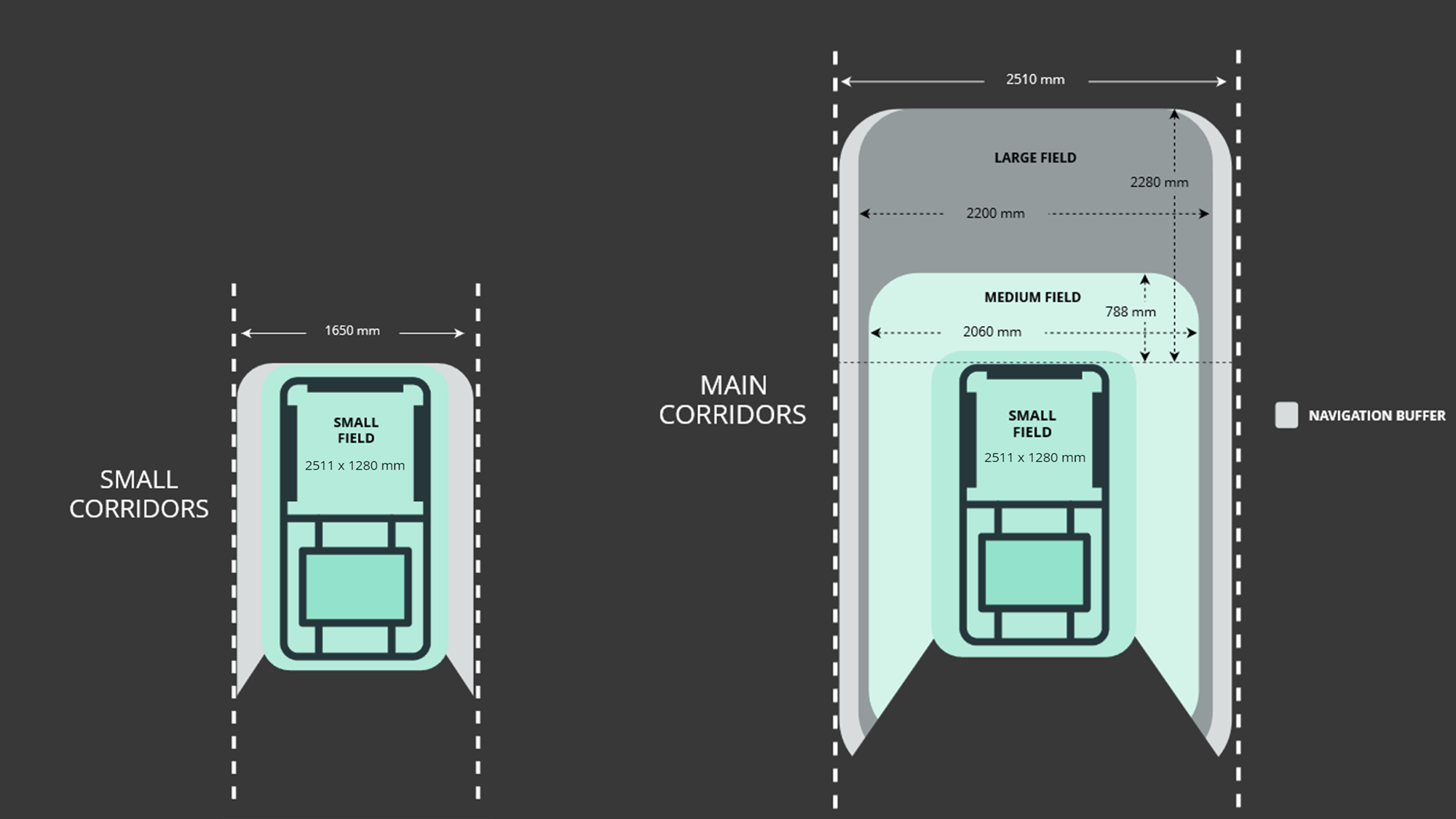
Sicherheits-Laserscanner
Drei sicherheitszertifizierte Laserscanner bilden in einer Höhe von 0,12 m einen Schutzbereich um den Roboter. Wenn dieser Bereich verletzt wird, verlangsamt SOTO seine Fahrt oder hält an und nimmt sie automatisch wieder auf, sobald das Feld frei ist.

Der Roboter überwacht die Umgebung nur in einer Höhe von 0,12 m sicher. Beachten Sie, dass der Roboter Hindernisse unterhalb oder oberhalb dieser Höhe nicht sicher erkennen kann.
Es gibt insgesamt drei Schutzfeld für verschiedene Erfassungsbereiche rund um die physische Fußabdruck von SOTO. Der Roboter überwacht diese Felder und erkennt Hindernisse oder Personen in seinem Weg. Die Schutzfelder sind das kleine, mittlere und große Feld.
Der kleine Schutzfeld ist immer aktiv - ohne Ausnahme.
Die Schutzfelder sind wie folgt definiert:
Schutzfelder | |
|---|---|
Höhe des Laserscanners | 120 mm |
Minimale Hindernisbreite, die auf Höhe des Laserscanners erkannt werden kann (sichere Personendetektion mit Performance Level D nach ISO 13849) | 70 mm im großen und mittleren Feld |
Minimale Hindernisbreite, die in Höhe des Laserscanners erkannt werden kann (Standard-Hinderniserkennung) | 25 mm |
Kleines Schutzfeld (L x B) | 2511 x 1280 mm |
Mittleres Schutzfeld | 788 mm zur Vorder- und Rückseite des Roboters 500 mm zur Seite des Roboters |
Großes Schutzfeld | 2280 mm zur Vorderseite des Roboters |
Die maximal zulässige Geschwindigkeit des Roboters in jeder Situation wird auf der Grundlage der verletzten Schutzfelder ermittelt. Der Roboter reduziert seine Geschwindigkeit je nach Situation automatisch auf die zulässige Höchstgeschwindigkeit.
Zulässige Robotergeschwindigkeit | |
|---|---|
Maximale Geschwindigkeit, wenn keine Felder verletzt werden | 1,5 m/s |
Maximale Geschwindigkeit bei Verletzung des Großfeldes | 0,8 m/s |
Maximale Geschwindigkeit, wenn das mittlere Feld verletzt wird | 0,3 m/s |
Maximale Geschwindigkeit bei Verletzung eines kleinen Feldes | 0,0 m/s (Stillstand) |
Seitliche Fahrgeschwindigkeit | 0,2 m/s |
Sicherheitslichtvorhänge
Vier zertifizierte Lichtvorhänge schützen das Innere des Roboters. Jedes Eindringen, wie z.B. das Hineingreifen einer Person, durchbricht diese Vorhänge, was einen sofortigen Stopp aller SOTO-Bewegungen auslöst und den Bediener auffordert, das Sicherheitsereignis zu bestätigen.
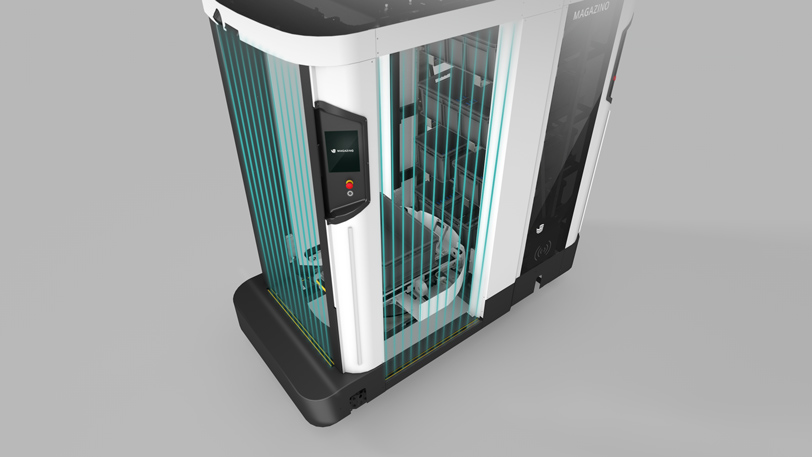
Damit der Roboter mit einer Übergabestation interagieren kann, wird der angedockte Zustand an der Übergabestation erkannt und nur der entsprechende Lichtvorhang in Richtung der angedockten Seite deaktiviert. Greifen Sie nicht in den Spalt zwischen SOTO und einem Regal, während der Roboter Ladungsträger übergibt.
| Achtung! |
|---|---|
Verletzungsgefahr! Personen können durch das Durchlaufregal hindurchgreifen und beim Aufnehmen und Absetzen mit beweglichen Teilen des Greifers und des Lastenträgers in Berührung kommen. Personen können zwischen den Roboter und ein Regal greifen, während der Roboter angedockt ist und Ladungsträger übergibt. |
| Achtung! |
|---|---|
Verletzungsgefahr! Personen können in den Roboter greifen und mit den beweglichen Teilen des Greifers oder des Backpacks in Berührung kommen. |
Automatischer Modus
SOTO arbeitet hauptsächlich im automatischen Modus. Ein Eingriff durch geschultes Personal oder eine Fachkraft ist nur im Falle einer Störung erforderlich.
Lichtsignale im automatischen Modus
Weißes Licht pulsiert | Weißes Licht blinkt |
|---|---|
 | |
SOTO ist arbeitsbereit und wartet auf neue Sammeltransportaufträge. | Der Pfad ist blockiert. |
Eine Seite weiß und die andere rot | Rotes Licht blinkt |
|---|---|
 |  |
SOTO zeigt mit dem weißen Licht die Fahrtrichtung an. | SOTO hat einen Fehler. |
Eine Seite weiß und die andere blinkt gelb | Gelbes Licht blinkt |
|---|---|
 | |
SOTO zeigt eine Kurvenfahrt an. | SOTO interagiert mit einer Übergabestation. Der Lichtvorhang vor der Übergabestation ist ausgeschaltet. |
Grünes Licht pulsiert | Grünes Licht konstant |
|---|---|
 | |
SOTO wird aufgeladen. | SOTO ist vollständig aufgeladen. |
Manueller Modus
Der Controller kann zum Bewegen des Roboters verwendet werden (z.B. während des Mappings oder der Re-Lokalisierung).

| Gefahr! |
|---|---|
Es besteht Unfallgefahr! SOTO kann im manuellen Modus außerhalb des Arbeitsbereichs gefahren werden. Als Bediener sind Sie dafür verantwortlich, dass die Sicherheit zu jeder Zeit gewährleistet ist, wenn Sie SOTO mit dem Controller bewegen. |
| Hinweis! |
|---|---|
Beschädigungsgefahr! Der Roboter kann im manuellen Modus gegen hervorstehende Hindernisse fahren, die von den Laserscannern nicht erkannt werden. Fahren Sie nicht gegen Hindernisse. Fahren Sie den Roboter nicht außerhalb Ihres Sichtfeldes. Achten Sie immer darauf, dass oberhalb des Roboters genügend Freiraum vorhanden ist, damit der obere Laserscanner nicht beschädigt wird. |
Aufladen
SOTO verwendet kontaktloses induktives Laden. Der Roboter fährt automatisch in die Ladeposition. Die Induktionsfläche des Roboters kommuniziert mit der Induktionsfläche des Ladegeräts. Erst wenn sich beide Geräte gegenseitig erkannt haben, wird das Ladegerät aktiviert und der Roboter geladen.

| Achtung! |
|---|---|
Verbrennungsgefahr! Die Induktionsflächen am Roboter und am Ladegerät können während des Ladevorgangs heiß werden. Das Gehäuse des Ladegeräts muss während des Betriebs geschlossen bleiben. |
| Warnung! |
|---|---|
Stromschlaggefahr! Das Ladegerät wird mit 230 V versorgt. Das Gehäuse des Ladegeräts muss während des normalen Betriebs geschlossen sein. Arbeiten am Ladegerät dürfen nur von Elektrofachkräften durchgeführt werden. Trennen Sie das Ladegerät von der Stromversorgung, bevor Sie das Ladegerät öffnen. Verwenden Sie das Ladegerät nicht, wenn Sie sichtbare Mängel feststellen. Trennen Sie das Gerät vom Spannungsversorgung und wenden Sie sich an eine qualifizierte Elektrofachkraft. |
| Hinweis! |
|---|---|
Das Ladegerät darf nur mit angebrachten Warnhinweisen betrieben werden. Kontaktieren Sie Magazino, wenn beschädigte oder entfernte Warnschilder ersetzt werden müssen. |
Blue-Spot
SOTO warnt Personen mit einem Blue-Spot in Fahrtrichtung.

Achten Sie auf den Blue-Spot - besonders in lauten Umgebungen und beim Betreten von Fahrwegen mit eingeschränkter Sicht. Nähern Sie sich dem Roboter nicht mit hoher Geschwindigkeit.
| Achtung! |
|---|---|
Verletzungsgefahr! Personen können aus einer abgeschirmten Position, die von den Schutzvorrichtungen des Roboters nicht wahrgenommen werden kann, in den Weg des Roboters treten.< Je nach Szenario und Annäherungsgeschwindigkeit reicht der Bremsweg des Roboters möglicherweise nicht aus, um vor dem Kontakt vollständig zum Stillstand zu kommen. |