
UT02 - SOTO in Betrieb
Voraussetzungen
Damit SOTO Transportaufgaben effektiv erledigen kann, müssen einige Voraussetzungen erfüllt sein:
SOTO ist eingeschaltet und hat eine aktive drahtlose Netzwerkverbindung
Die Umgebung wurde kartiert und mit Fahrtrouten und Infrastruktur modelliert
SOTO erhält VDA5050 Sammeltransportaufträge von einem Lagerverwaltungssystem über ein Master Controller System
Alle Fehler wurden quittiert und die Not-Halt-Tasten wurden gelöst
SOTO ist im automatischen Modus
Roboter ist lokalisiert
Als SOTO-Endanwender können Sie die oben genannten Voraussetzungen ausblenden, da sie vom Systemintegrator bei der Projektumsetzung implementiert werden.
Ausführung von Sammeltransportaufträgen
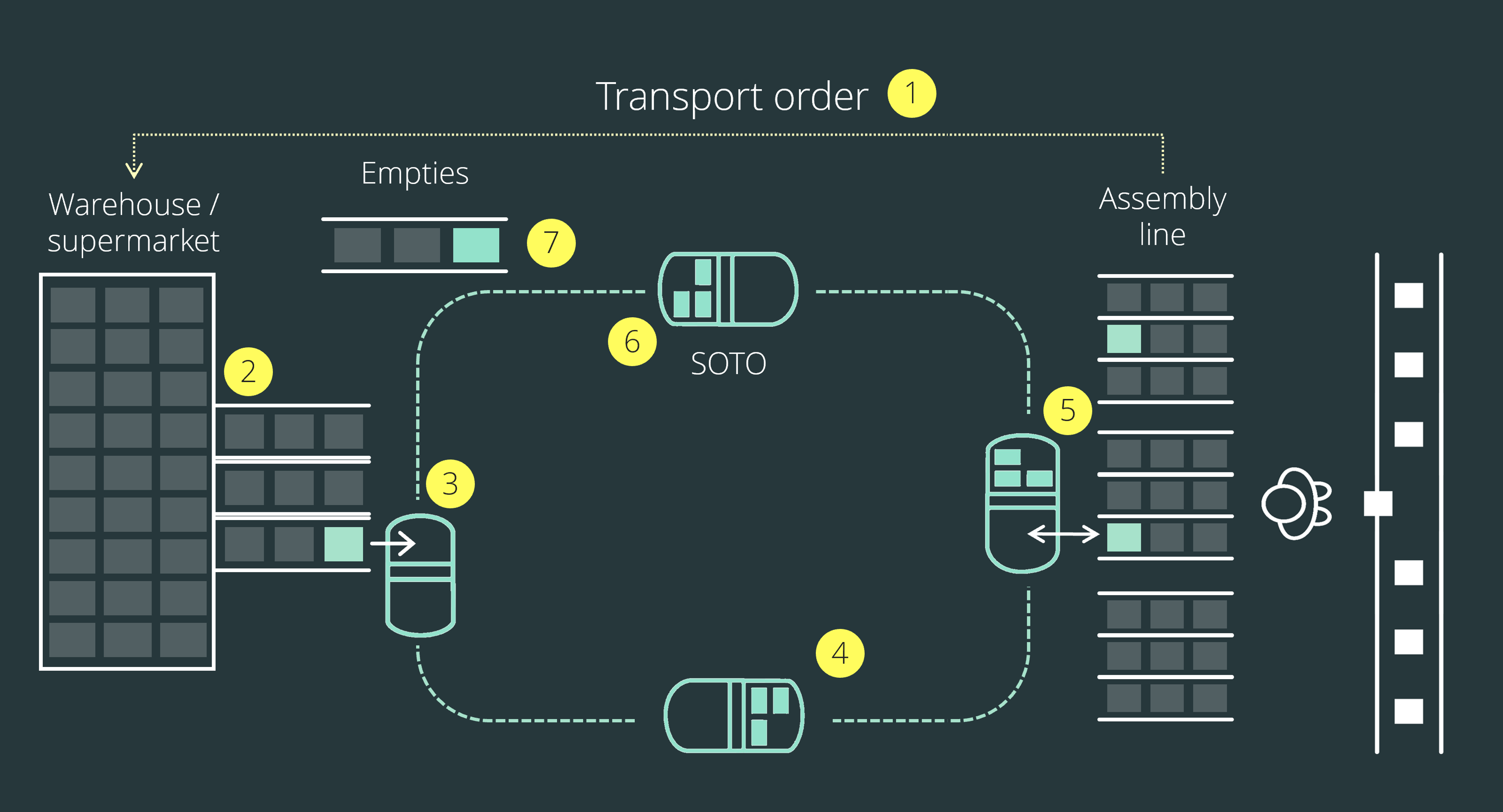
Im Allgemeinen könnte ein SOTO-Transport wie folgt aussehen:
Nummer | Beschreibung |
1 | Der Sammeltransportauftrag wird im Master Controller System geplant. Der Sammeltransportauftrag wird erstellt und die Auftragsinformationen werden an das automatische Lager und SOTO übermittelt. |
2 | Das Automatisierte Kleinteilelager stellt die benötigten Ladungsträger am Übergabepunkt bereit. |
3 | SOTO steuert die Übergabestation an, nimmt die Ladungsträger auf und verstaut sie im Backpack. |
4 | SOTO navigiert zur Montagelinie. |
5 | SOTO übergibt die Ladungsträger in die Durchlaufregale der Montagelinie, damit die Arbeitskräfte sie verwenden können. Gleich danach nimmt SOTO die leeren Ladungsträger auf und verstaut sie im Backpack. |
6 | SOTO navigiert zurück zum Automatisierten Kleinteilelager. |
7 | SOTO stellt die leeren Ladungsträger in die vorgesehene Übergabestation und ist bereit für einen neuen Sammeltransportauftrag. |
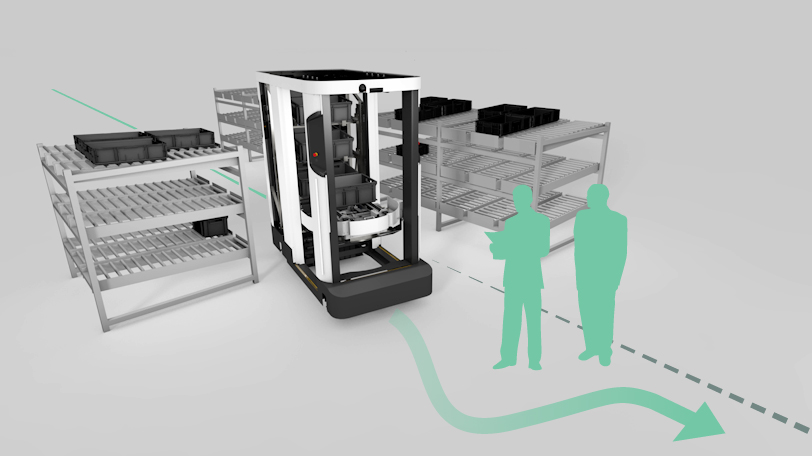
Natürlich hängt der endgültige Prozess von den Transportanforderungen des Kunden ab. Im Wesentlichen ist SOTO ein mobiler Roboter, der Ladungsträger von einer oder mehreren Übergabestationen abholt und sie direkt an den vorgesehenen Bestimmungsort bringt.
Während des Betriebs zeigt SOTO immer den Transportverlauf, den aktuellen Auftrag und anstehende Aktionen auf dem SOTO-Display an. So sind die Mitarbeiter in der Nähe immer gut über die aktuellen und zukünftigen Aktivitäten des Roboters informiert.

Immer wenn SOTO keinen aktiven Sammeltransportauftrag hat, fährt der Roboter zu einem vordefinierten Parkplatz und wartet auf weitere Anweisungen.
Wahrnehmung der Umgebung
Um das Verhalten von SOTO besser nachvollziehen zu können, ist es wichtig zu verstehen, wie der Roboter seine Umgebung wahrnimmt.
Sensor setup
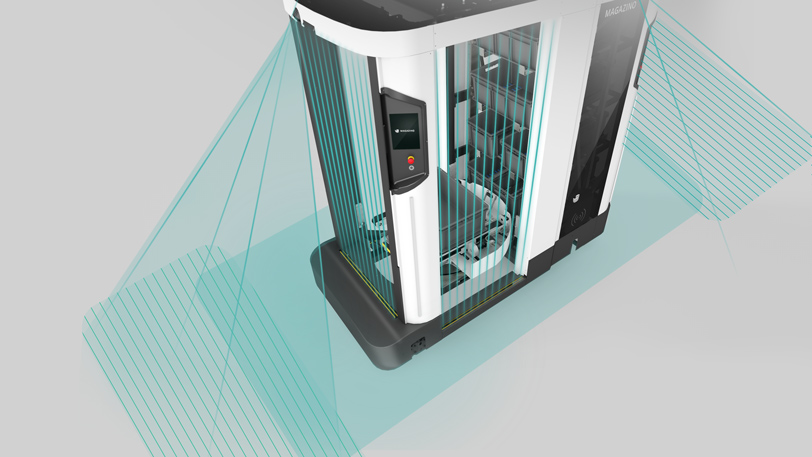
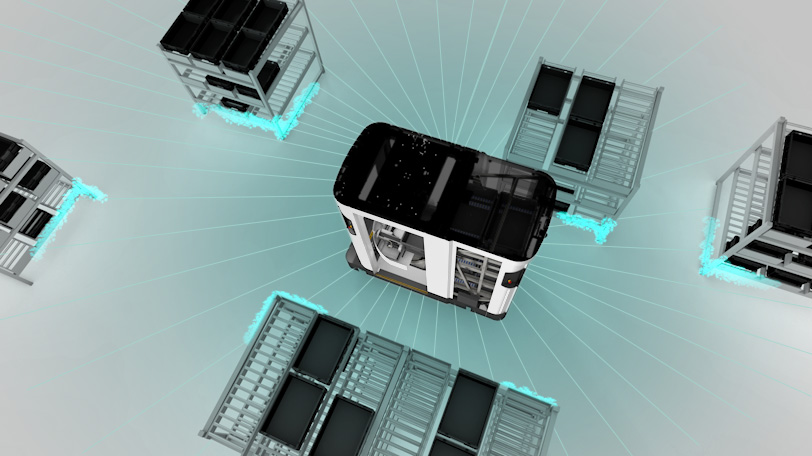
SOTO ist mit einer Reihe von Sensoren ausgestattet, die ihm jederzeit einen Gesamtüberblick über seine Umgebung verschaffen. Zu den Umgebungssensoren gehören:
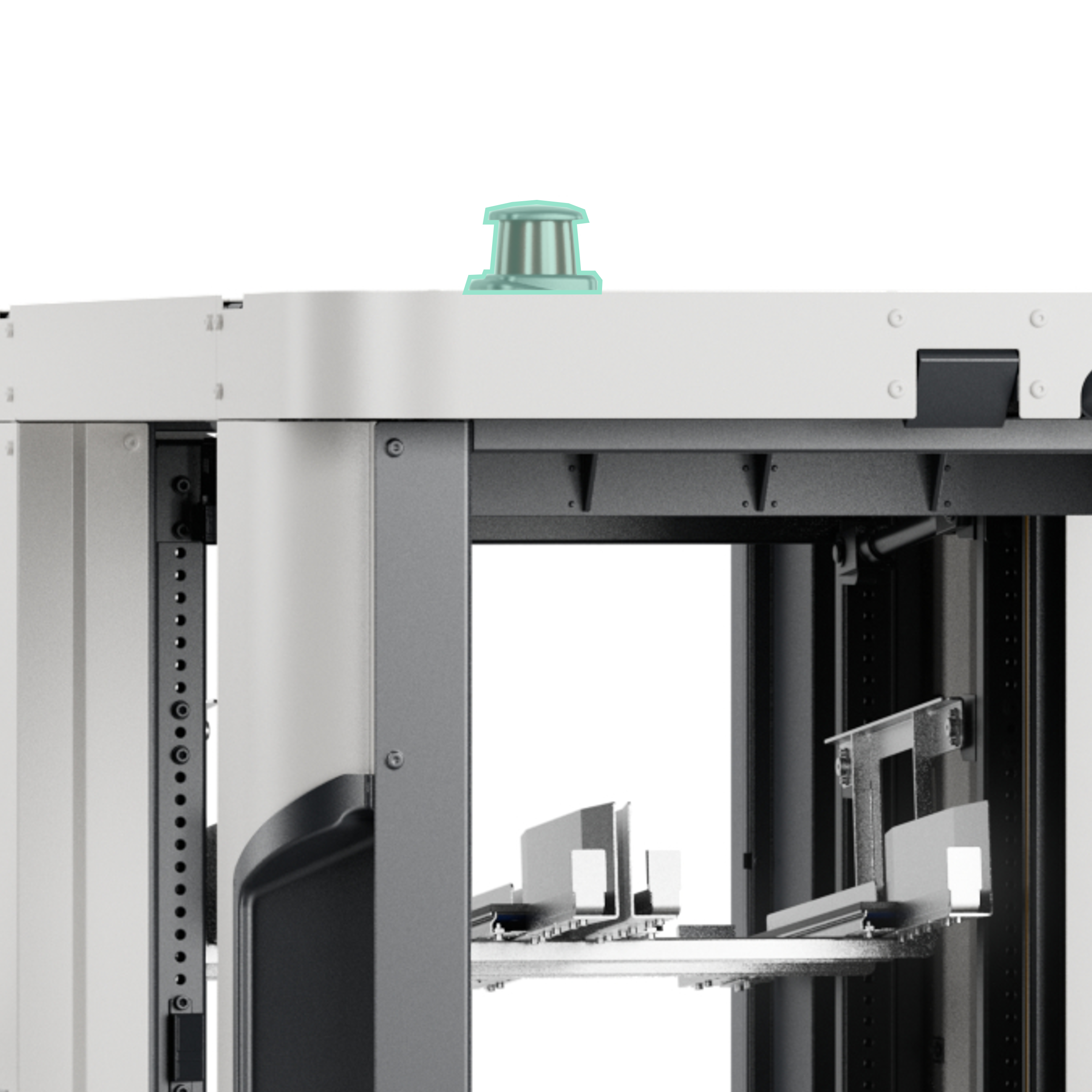
Laserscanner oben
SOTO ist mit einem 360°-Laserscanner auf der Oberseite des Roboters ausgestattet.
Dieser Laserscanner zeichnet die Lokalisierungskarte in einer Höhe von 2,2 m auf. In dieser Höhe gibt es in der Regel weniger Hindernisse und Veränderungen in der Umgebung, was die Lokalisierung stabiler macht.
Die Hauptfunktion dieses Laserscanners im Live-Betrieb ist die Lokalisierung.
Der obere Laserscanner verfügt außerdem über eine Sicherheitsfeldfunktion, die den Roboter anhält, wenn er sich einem Hindernis in der Höhe zu sehr nähert.
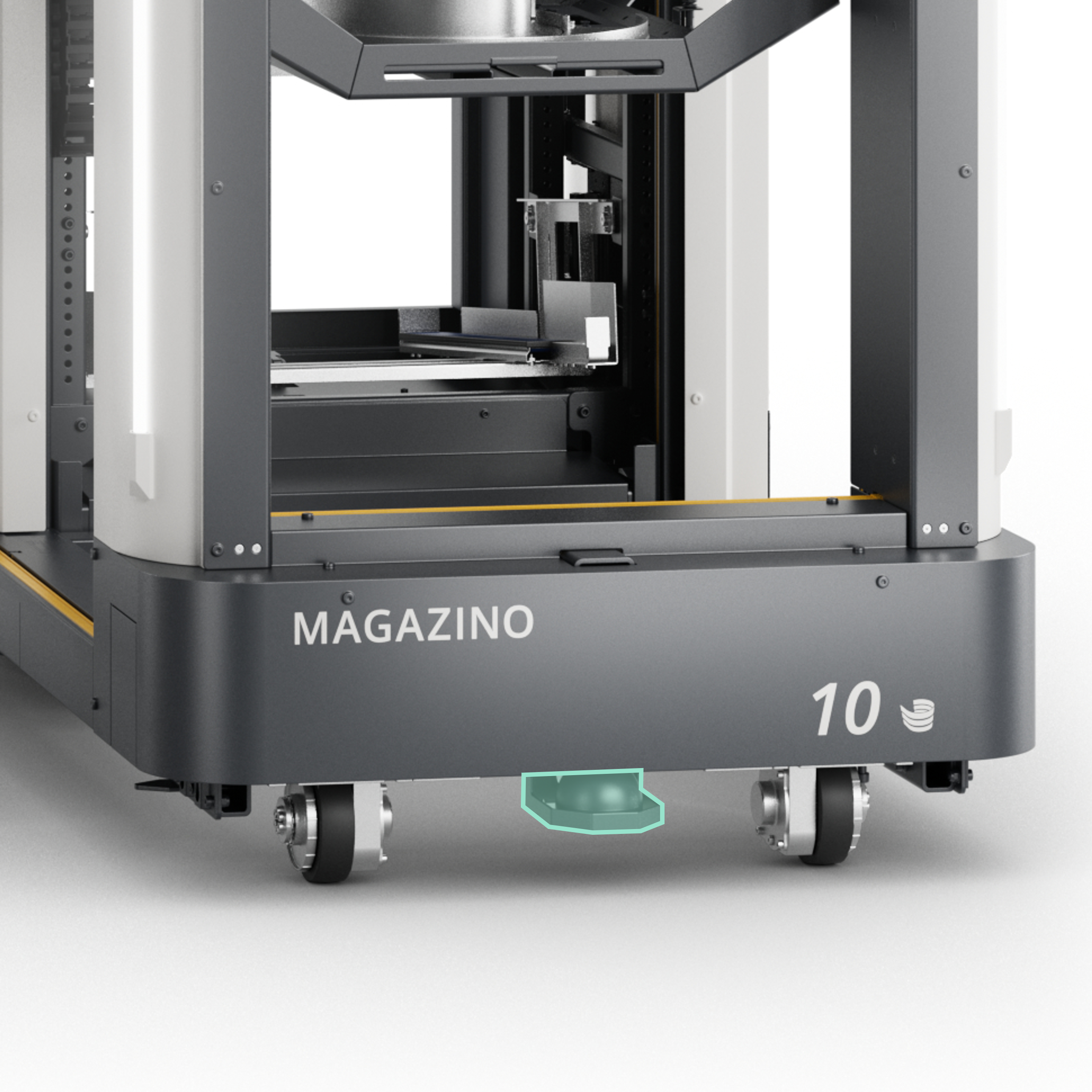
Laserscanner unten
SOTO ist mit drei Laserscannern an der Unterseite des Fahrgestells ausgestattet, die ein Sicherheitsfeld von 360° abdecken. Ein Laserscanner ist an der Vorderseite und zwei an der Rückseite unter dem Backpack angebracht.
Diese Laserscanner erfassen und kartieren die Umgebung in einer Höhe von 0,12 m.
Die Hauptfunktionen dieser Laserscanner im Live-Betrieb sind Sicherheit und Navigation. Wenn SOTO einem Objekt oder einer Person zu nahe kommt, hält der Roboter automatisch an.
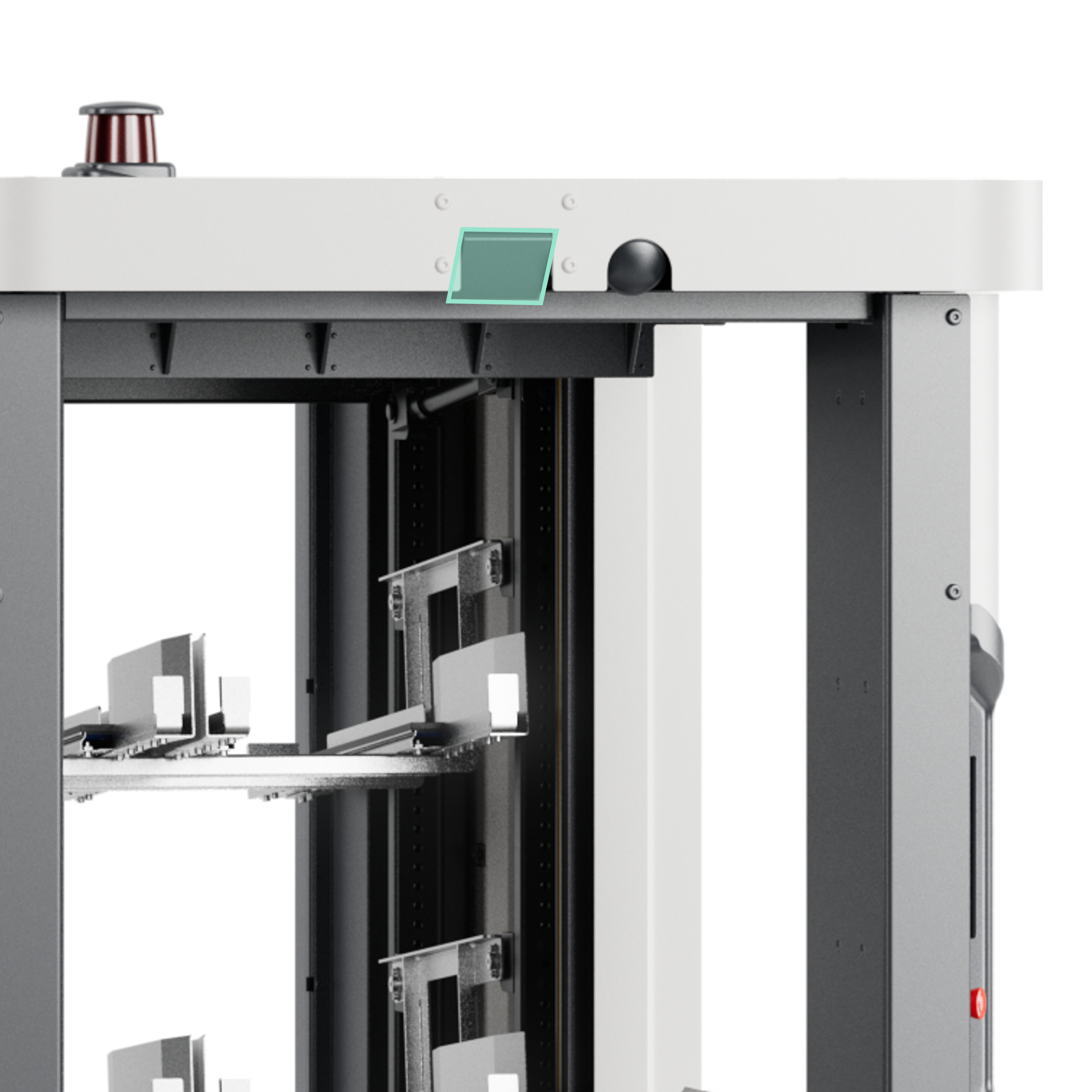
3D-Kameras
SOTO ist mit zwei 3D-Kameras ausgestattet. Eine befindet sich an der Oberseite des Roboterrahmens an der Vorderseite und die andere an der gegenüberliegenden Rückseite.
Im Live-Betrieb erstellen diese Kameras eine Punktwolke der Umgebung in Fahrtrichtung, die zur Navigation und Hindernisvermeidung genutzt wird.
Karten
Das Verhalten von SOTO basiert auf zwei Karten, die bei der Ersteinrichtung des Roboters aufgezeichnet werden.
Hier sind zwei Beispiele für Karten, die zur Lokalisierung und Navigation verwendet werden:
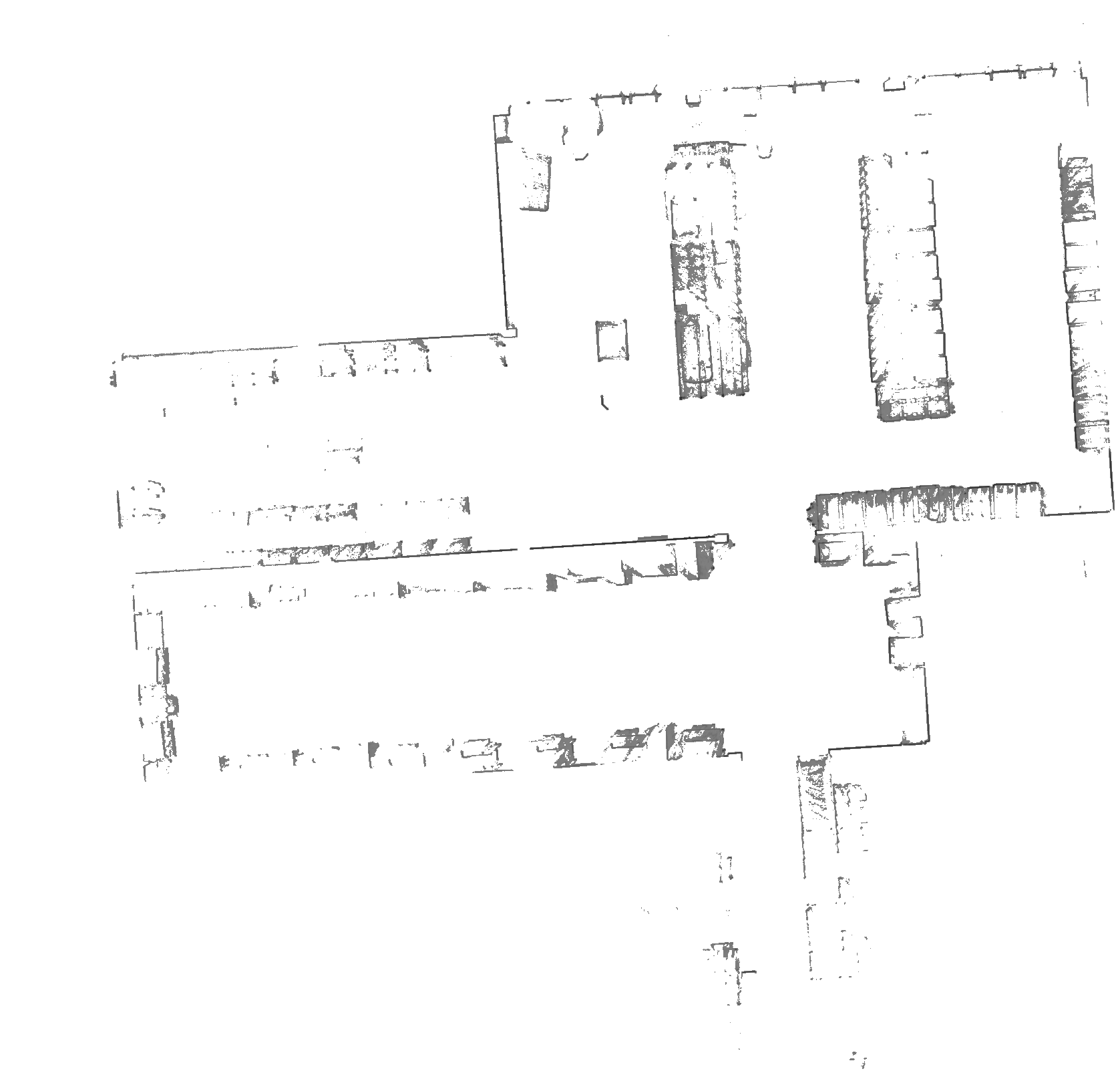 | Lokalisierungskarte Die Lokalisierungskarte wird vom oberen Laserscanner aufgenommen und zeigt einen 2D-Querschnitt des Gebiets in einer Höhe von 2,2 m. Der obere Laserscanner wird verwendet, da er eine größere Reichweite und die Fähigkeit hat, mehr feststehende Strukturen zu erkennen. Während des Live-Betriebs vergleicht SOTO diese Karte mit den Sensormesswerten, um sich präzise in der physischen Umgebung zu positionieren. |
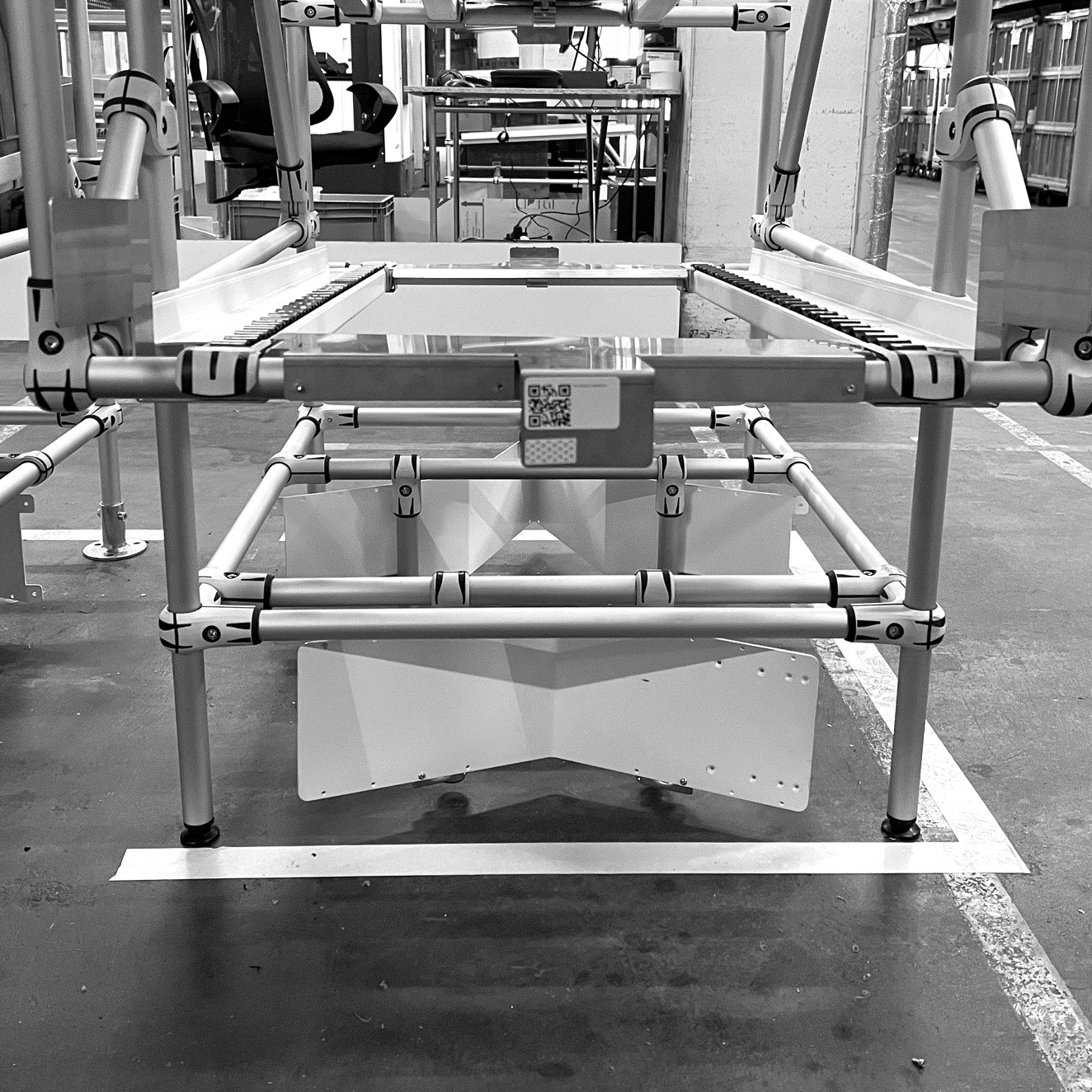
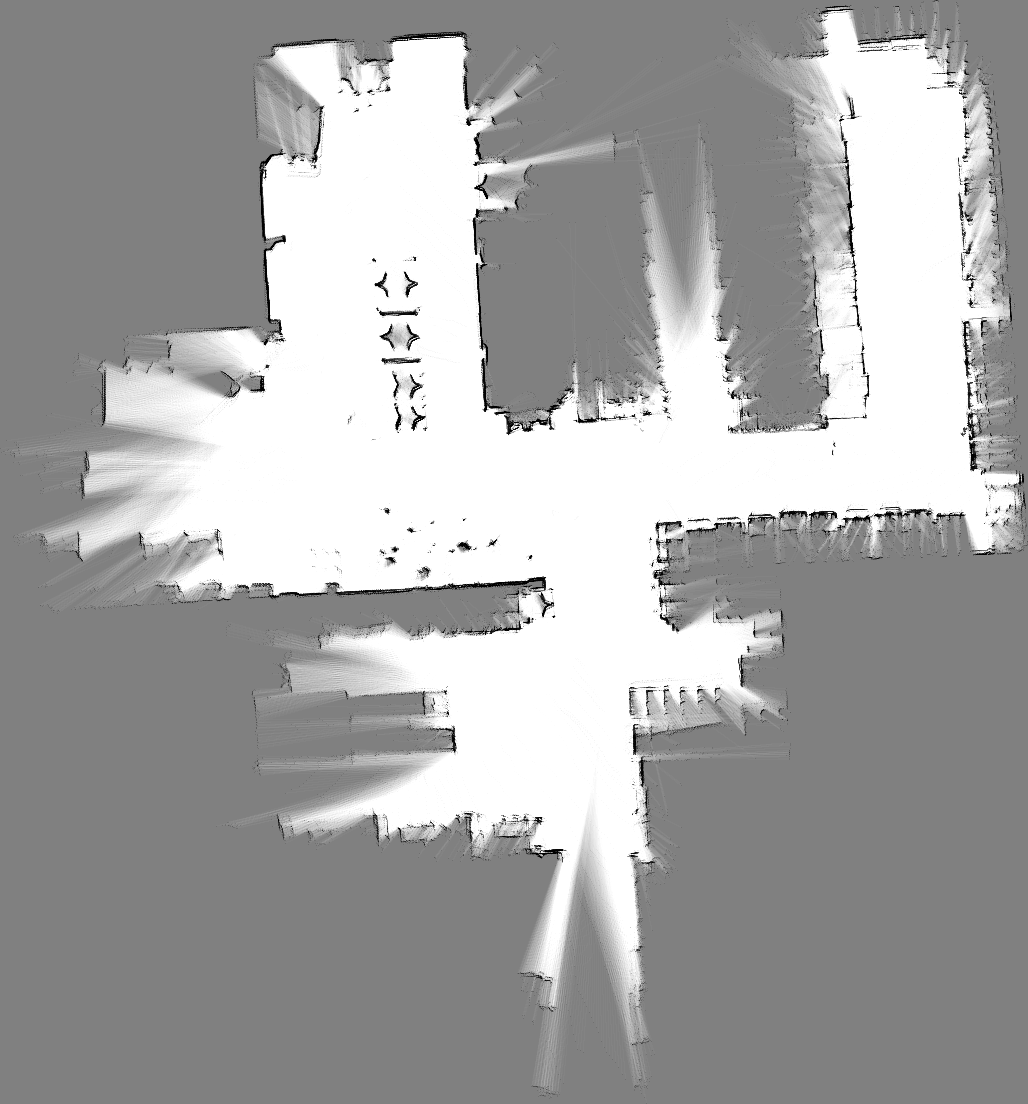 | Umgebungskarte Die Umgebungskarte wird von den unteren Laserscannern aufgezeichnet und stellt einen 2D-Querschnitt der Umgebung in einer Höhe von 0,12 m dar. Diese Karte zeigt die Positionen der Regale und Hindernisse auf Bodenebene (beachten Sie die sternförmigen Andockformen). Die Karte wird verwendet, um ein Modell der Umgebung zu erstellen, das der Anwender durch Hinzufügen von Übergabestationen, Regalen und eines Navigationsgraphen im Umgebungseditor anreichern kann. |
Modellierung
Während der Installation wird die Umgebungskarte mit allen zusätzlichen Informationen angereichert, die SOTO für die Ausführung von Sammeltransportaufträgen benötigt.

Die in der Umgebung platzierten Elemente sind:
 | Arbeitsbereich Erlaubter Bereich, in dem SOTO agiert und den das System nicht verlassen darf. |
 | Regale Regale mit Fachanordnung und Kennzeichnungen. |
 | Zonen Zonen mit reduzierter Geschwindigkeit. |
 | Hindernisse Hindernisse innerhalb des Arbeitsbereichs. |
 | Fahrgraph Graph, entlang dessen SOTO navigiert, mit erlaubten Fahrtrichtungen, Roboterausrichtung und Ausweichtoleranzen. |
 | Ladestationen Standort der SOTO-Ladestationen. |
 | Parkplätze Standort der SOTO-Parkplätze. |
Sobald die Modellierung der Umgebung abgeschlossen und validiert ist, wird sie auf SOTO übertragen.
Navigation
Im Live-Betrieb bewegt sich SOTO selbstständig durch den Arbeitsbereich. Der Roboter lokalisiert sich selbst anhand der Konturdaten des oberen Laserscanners in der physischen Umgebung.
Der Roboter fährt innerhalb der zulässigen Abweichungstoleranzen des Fahrgraphen zu seinem Zielort. Der genaue Pfad des Roboters und seine Geschwindigkeit werden durch die Messwerte der unteren Laserscanner und 3D-Kameras bestimmt.
Hindernisvermeidung
Der Navigations-Pfad ist nicht statisch. Wenn SOTO mit den 3D-Kameras Hindernisse auf seinem Weg entdeckt, wird der Navigationspfad neu geplant, so dass Hindernisse umfahren werden. Hindernisse können nur umfahren werden, wenn die Abweichungstoleranzen genügend Raum für das Manövrieren entlang der Fahrgraphen lassen.
Wenn der Bewegungsspielraum nicht groß genug ist, um das Hindernis zu umfahren, reduziert SOTO seine Geschwindigkeit und warnt Personen in der Nähe durch Lichtsignale. Der Roboter wartet dann, bis das Hindernis entfernt wurde.
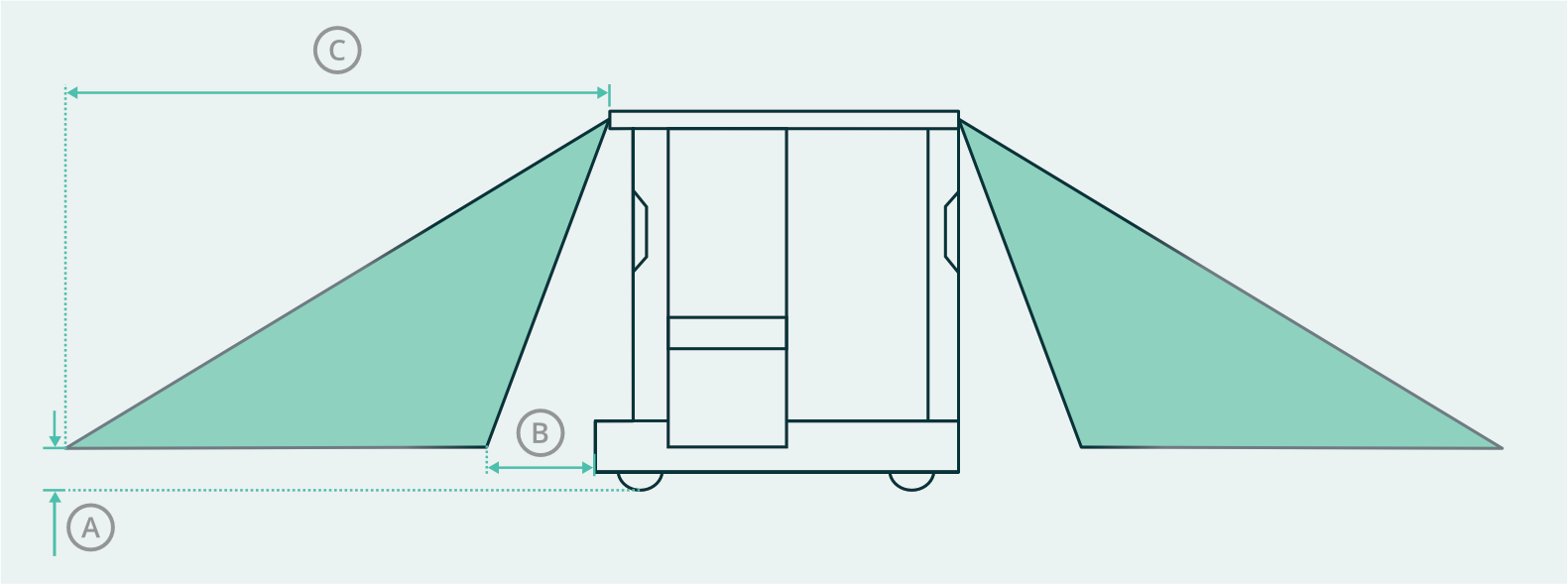
Hindernisse | ||
|---|---|---|
Mindestgröße des zu erkennenden Hindernisses (L × B × H) | 100 × 50 × 50 mm | |
Mindesthöhe über dem Boden | A | 70 mm |
Effektive Reichweite in Fahrtrichtung | B – C | 700 mm – 2700 mm |
Materialien | Metall (matt), Kunststoff, Papier und Karton |
Die Hinderniserkennung wird verwendet, um Hindernisse außerhalb des Sichtfelds der Laserscanner zu umfahren. Die Hinderniserkennung ist nicht Teil des Sicherheitskonzepts.
Andocken
Anstatt eine feste Position anzusteuern, nutzt SOTO seine Laserscanner, um Regale zu erkennen - auch wenn sie nur grob positioniert sind. SOTO erkennt Regale, indem er nach Andockformen sucht.
Alle Regale müssen mit einer der drei verfügbaren Andockformen ausgerüstet sein:
Bottom-Docking-Shape
”sternförmig”

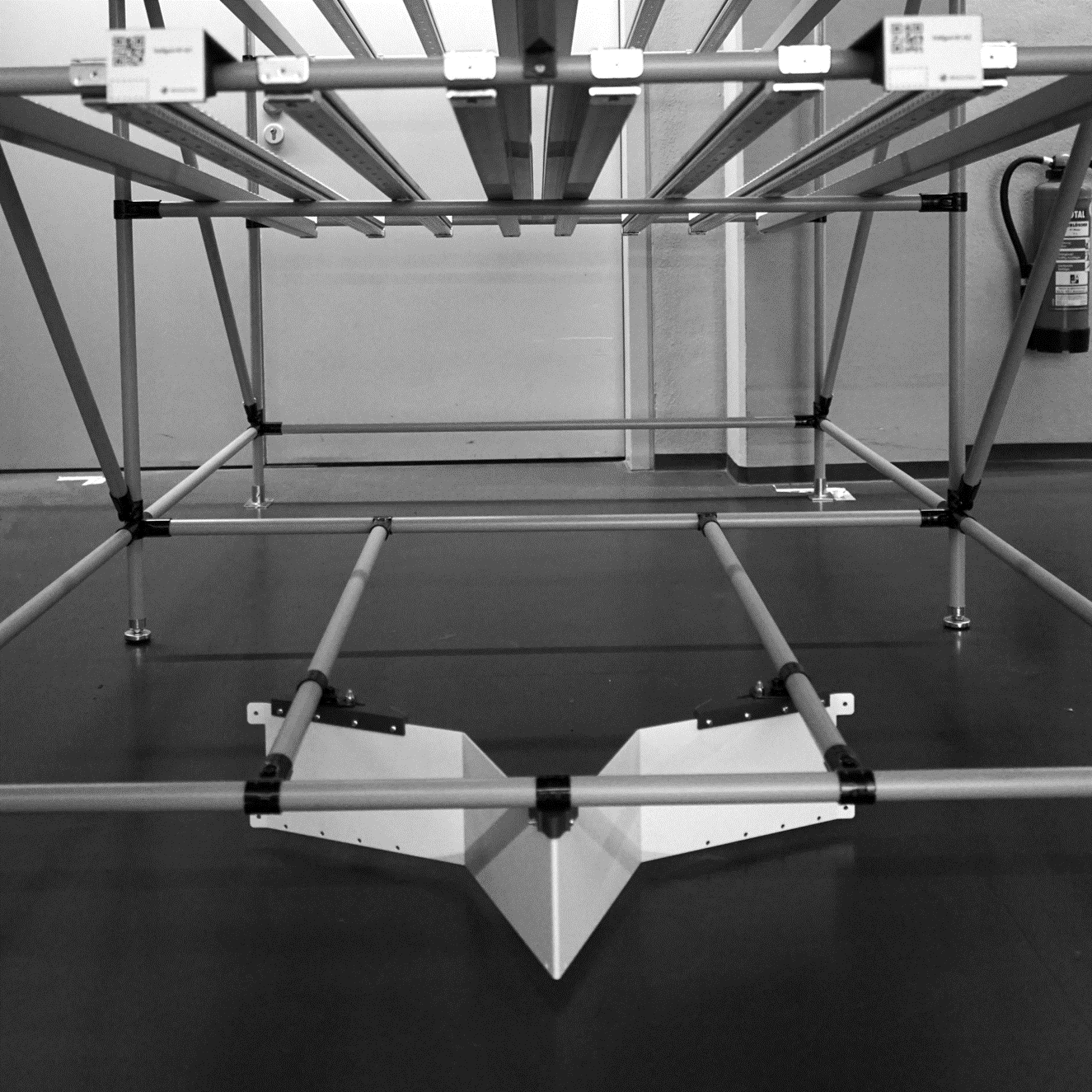
Bottom-Docking-Shape
”V-förmig”
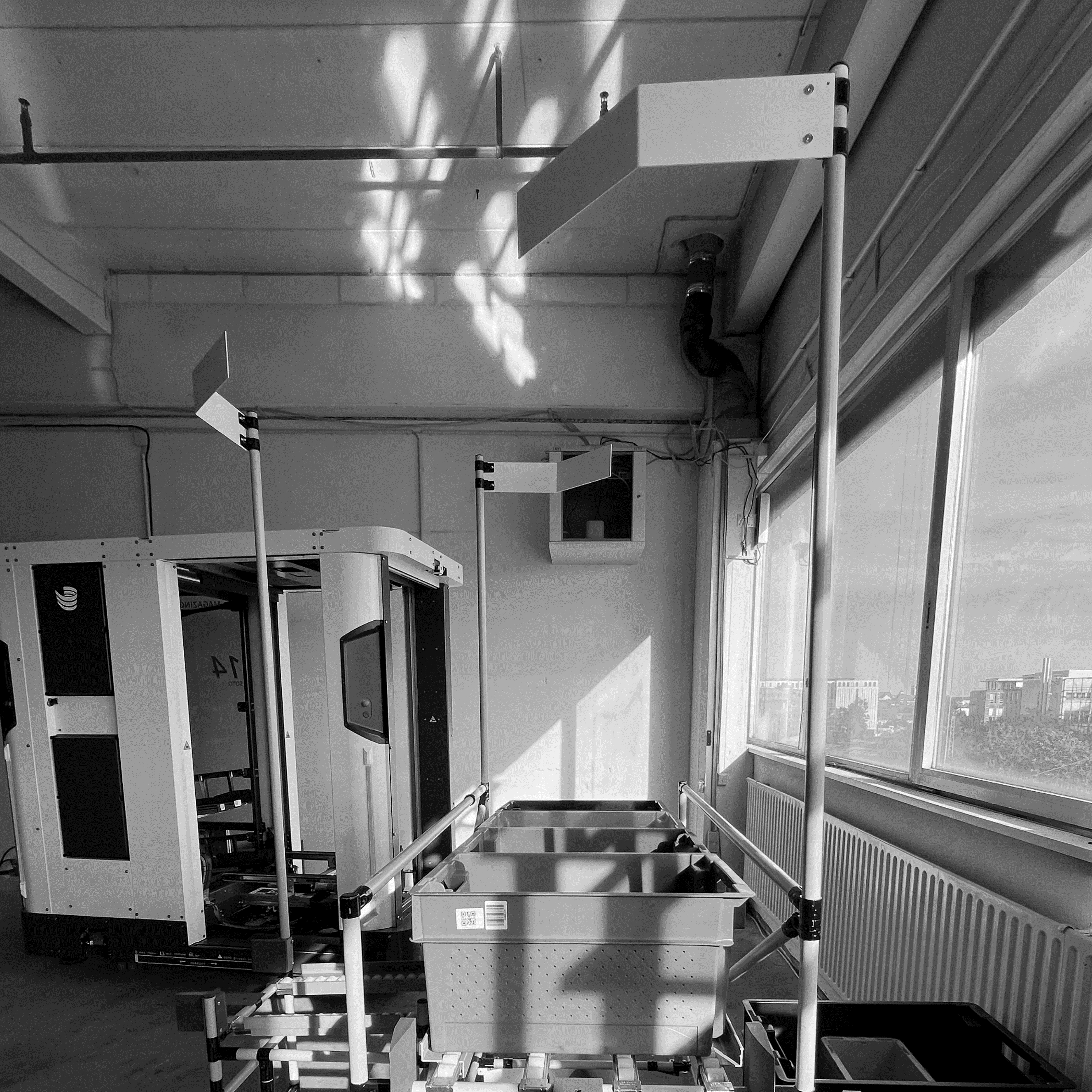
Top-Docking-Shape
”Fahne”
Die Andockformen müssen an der Ober- oder Unterseite der Regale in Höhe der SOTO Laserscanner angebracht werden.
Wenn die obere Andockform im Layout verwendet wird, wird die vom oberen Laserscanner aufgezeichnete Lokalisierungskarte auch für die Regalmodellierung und das Andocken verwendet.

Montage auf der Ebene des unteren Laserscanners (0,12 m)

Montage auf Ebene des oberen Laserscanners (2,20 m)
Sobald SOTO die Andockform erkannt hat, positioniert er sich präzise vor dem Regal. Der Roboter kompensiert alle Positionsverschiebungen, die das Regal gegenüber der modellierten Umgebung aufweist.
SOTO ist in der Lage, Abweichungen des Regals von seiner modellierten Position auszugleichen, wie unten beschrieben:
Maximaler seitlicher Versatz zwischen realer und modellierter Position der Übergabestation | +/- 200 mm |
Maximaler Winkelversatz zwischen realer und modellierter Position der Übergabestation | +/- 5° |
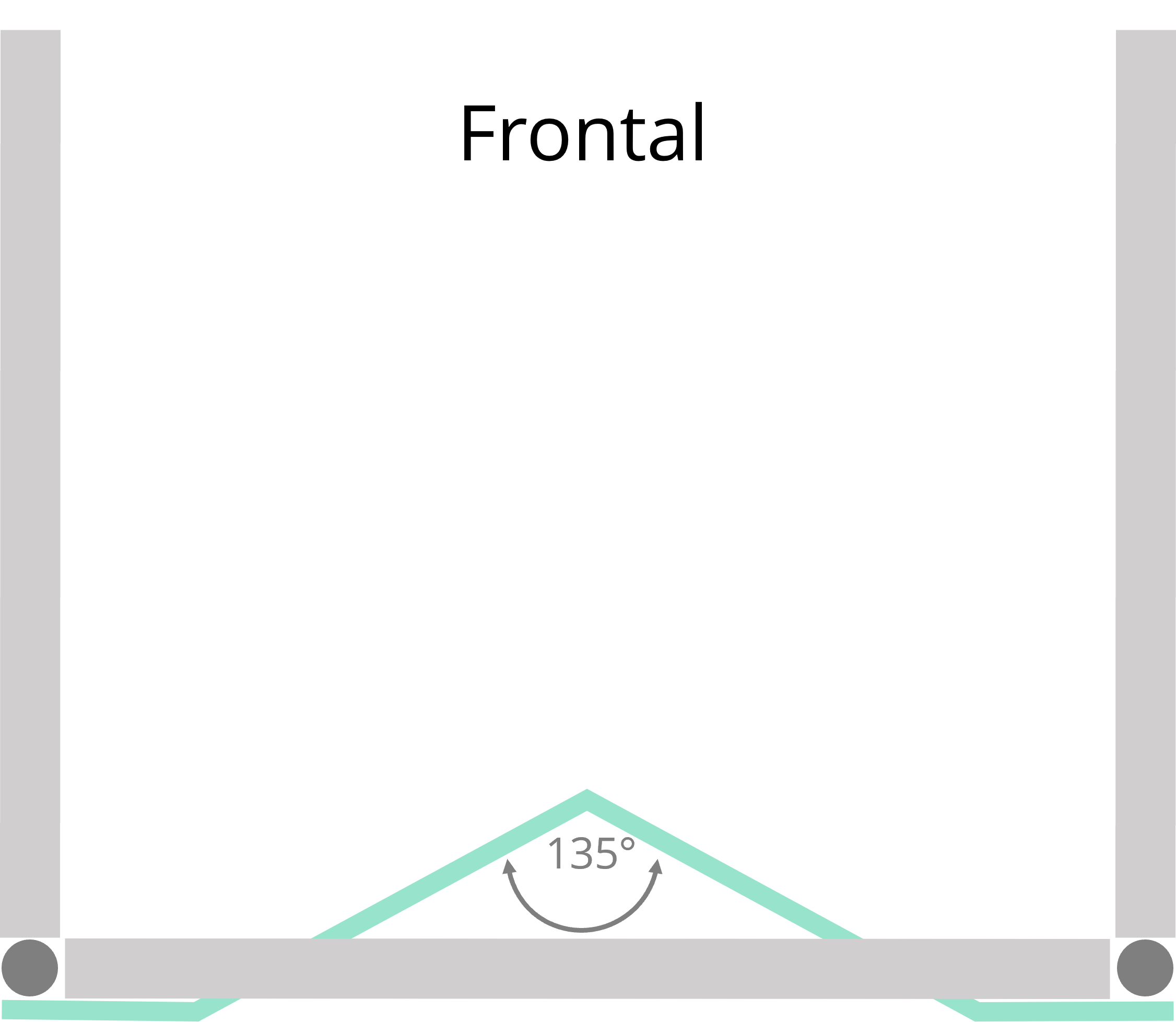
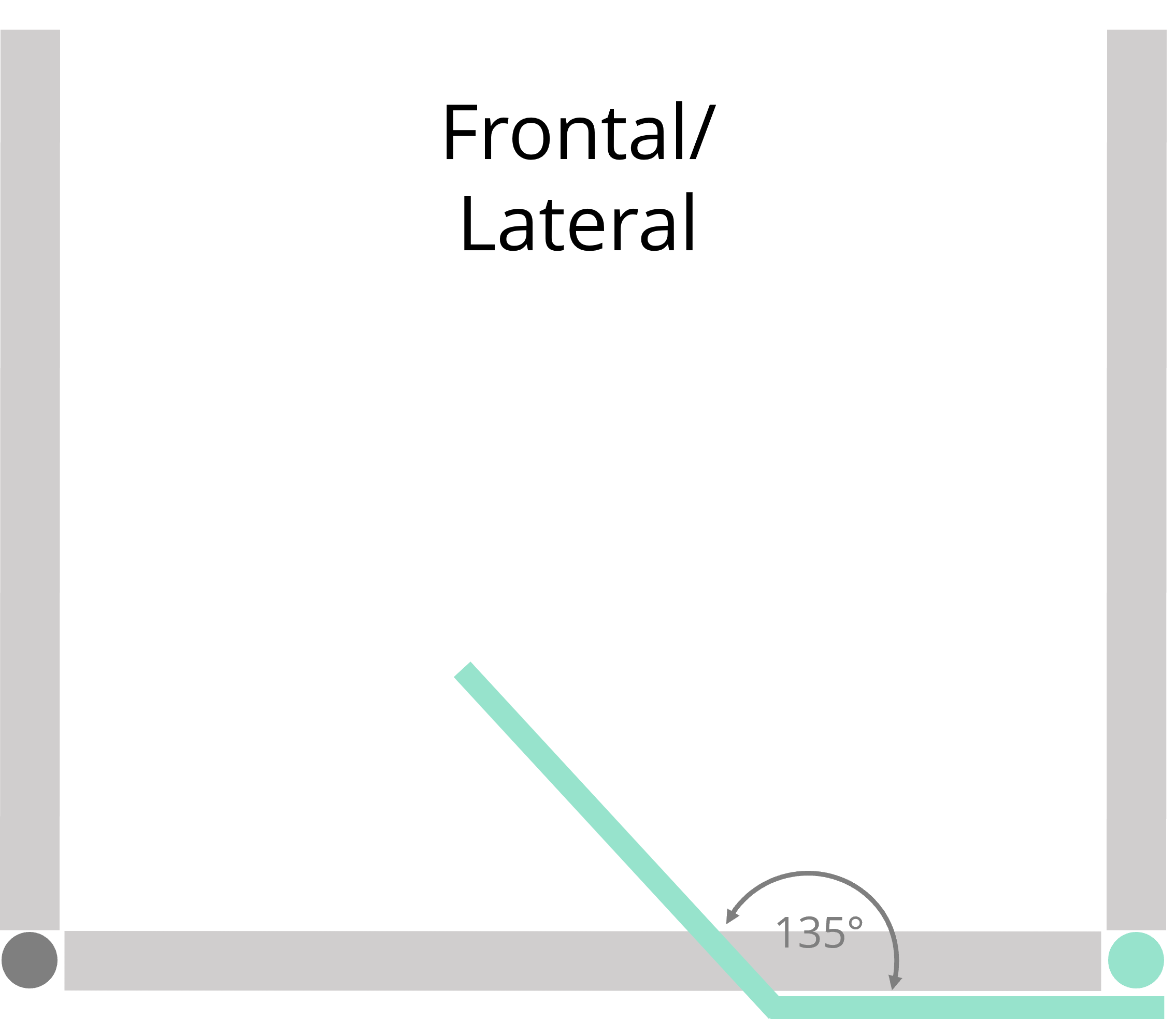
SOTO kann ein frontales oder seitliches Andockmanöver durchführen, abhängig von der Art der verwendeten Andockform und den bei der Inbetriebnahme vorgenommenen Einstellungen.
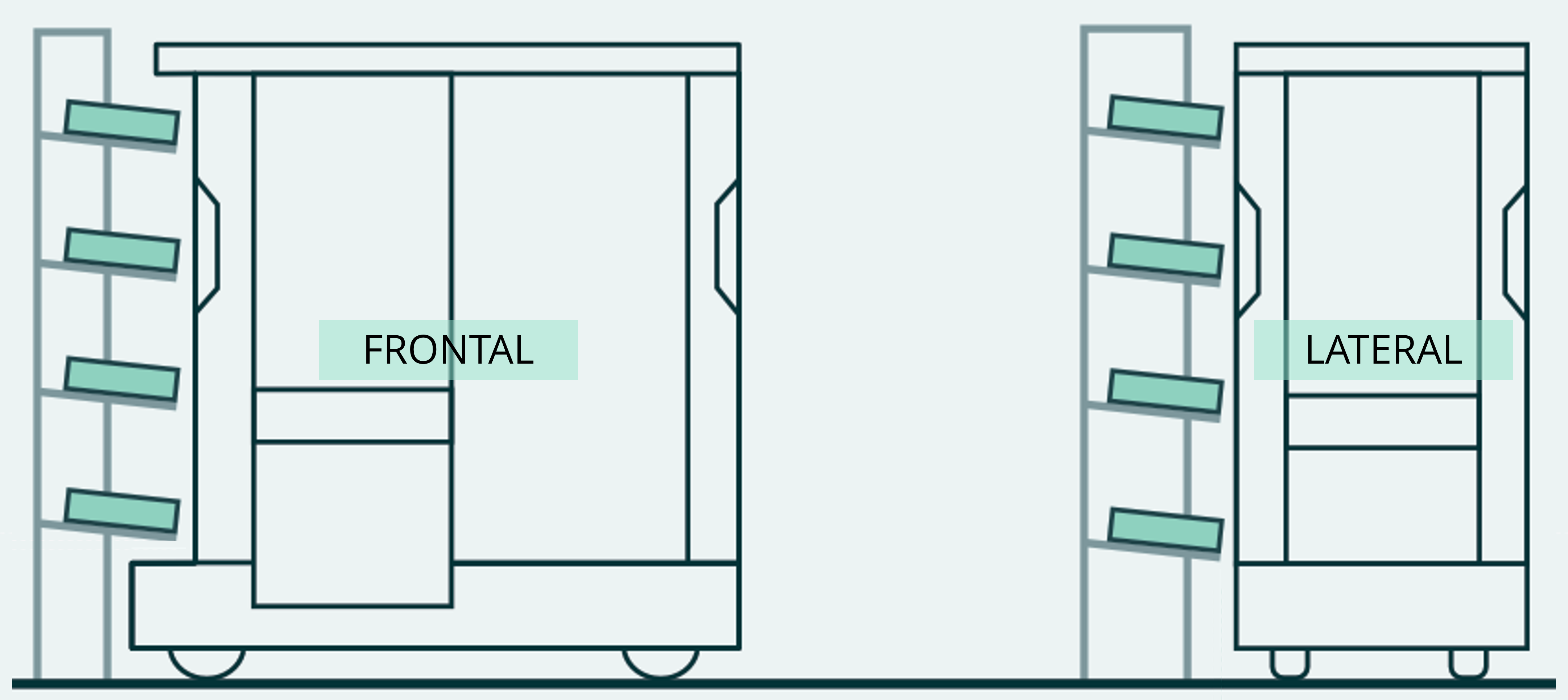
Die am besten geeignete Andockmethode wird durch den in der Umgebung verfügbaren Platz bestimmt, d.h. frontales Andocken ist erforderlich, wenn der Abstand zwischen der Mitte des Regals und der Wand 1000 mm beträgt.
Aufnehmen und Ablegen
Die Andockformen werden ausschließlich zur Positionierung des Roboters vor dem Regal verwendet. Sobald er angedockt ist, sind das Verhalten und der Informationsaustausch des Roboters ausschließlich auf die einzelnen Fächer des Regals ausgerichtet.
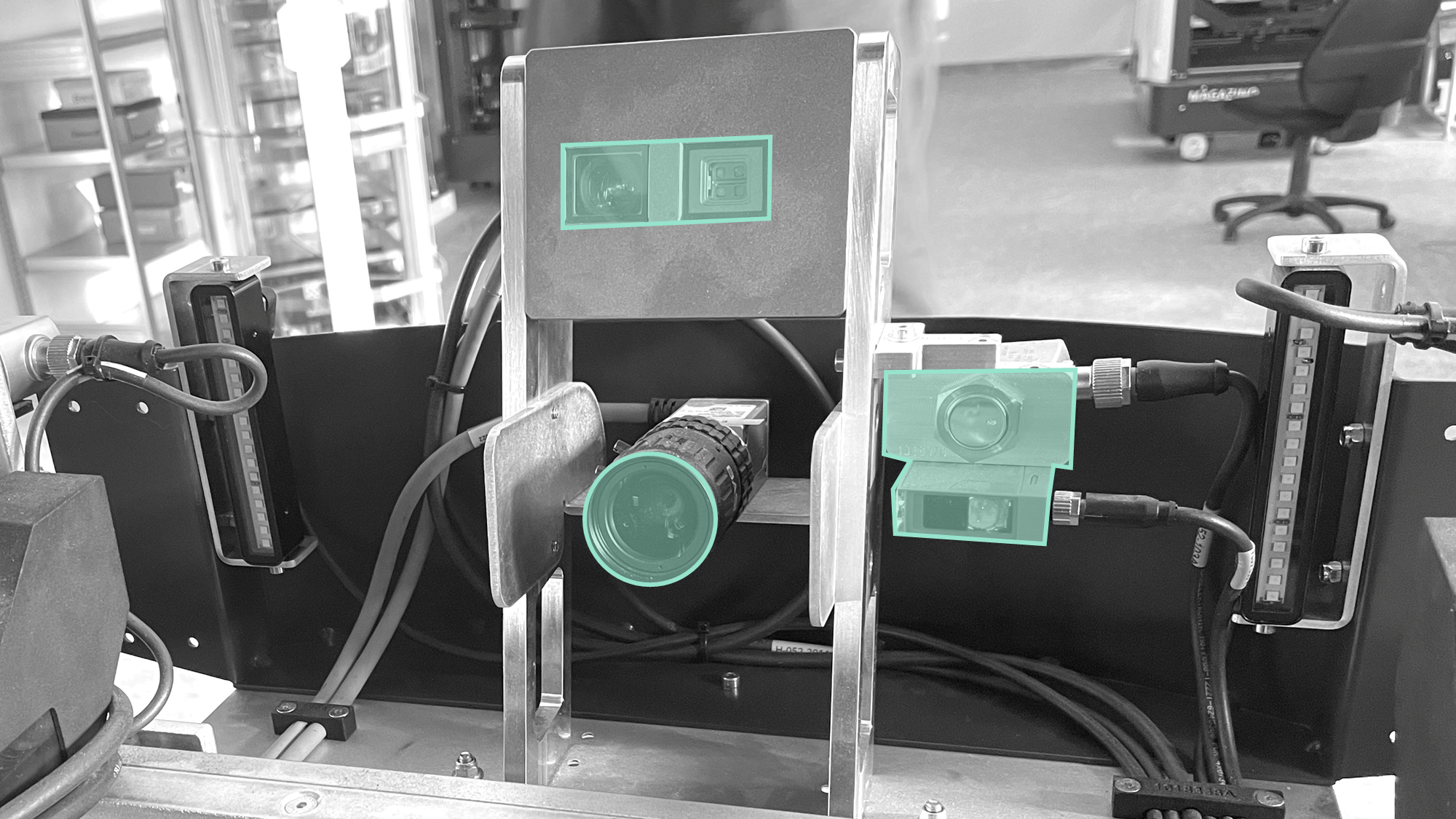
SOTO verwendet die optischen Sensoren am Greifer, um das Fach und den Ladungsträger zu erkennen.

Zu diesem Zweck befinden sich zwei Kameras im Greifer:
Hochauflösende 2D-Kamera zur Erkennung von Barcodes
3D-Kamera zur Messung von Entfernungen zu Ladungsträgern
Zweikanal Reflektorstreifen-Detektoren
Jedes Regalfach muss mit einem Aufnahme- oder Ablageadapter ausgestattet werden, je nachdem, ob das Fach als Quelle oder Senke für Ladungsträger dient. Die Adapter bestehen aus zwei Hauptkomponenten: Positionierungstrichter, die die Ladungsträger führen, und ein Fachkennzeichnungsfeld. Das Fachkennzeichnungsfeld enthält einen QR-Code mit den Namen des Fachs und einen Reflektorbandstreifen.
Das Fachkennzeichnungsschild muss sich exakt an die im folgenden angegebenen Maße halten:
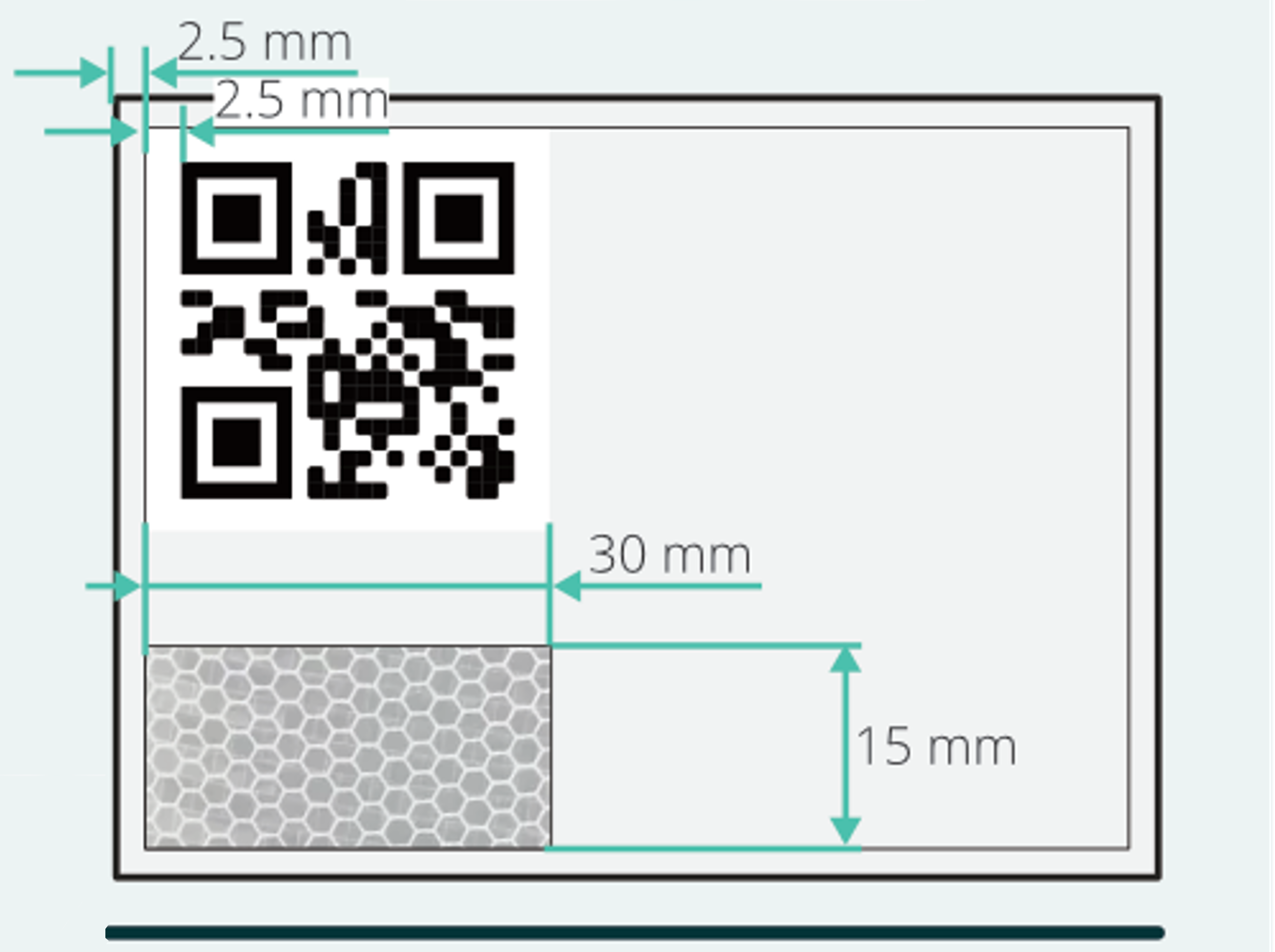

Darüber hinaus muss jeder Ladungsträger mit einer Kennzeichnung versehen sein.

Arten von Identifikationscodes auf Gegenständen | QR, DataMatrix und Code128 |
Mindestlinienbreite von 1D-Barcodes | 0,33 mm |
Mindestmodulbreite von 2D-Barcodes | 0,33 × 0,33 mm |
Zustand der Etikettenoberfläche | nicht reflektierend |
Mit all diesen Komponenten kann SOTO nun die Ladungsträger aufnehmen und in das dafür vorgesehene Regalfach ablegen. Zusammengefasst funktioniert die Anfahrt des Übergabe-Regals wie folgt:
Grobe Navigation zum Übergabe-Regal auf der Grundlage der Karte und der Konturnavigation
Erkennung der Andockform des Übergaberegals mit den Laserscannern
Präzise Positionierung (Docking) vor dem Regal
Identifizierung des Regalfachs anhand des QR-Codes auf dem Adapter
Stummschaltung des Lichtvorhangs nach Erkennung des Reflektorstreifens
Übergabe des Ladungsträgers

Aufnahme
Sobald SOTO das richtige Fach und den richtigen Ladungsträger erkannt hat, hebt es den Ladungsträger mit dem Greifer sanft an und zieht ihn dann mit den Förderbändern des Greifers in den Roboter ein.
Abgabe
Bei der Abgabe eines Ladungsträgers in ein Fach legt SOTO diesen über die Förderbänder des Greifers in den Positionierungstrichter und lässt ihn in das Fach gleiten.
SOTO stellt sicher, dass das Fach leer ist, bevor ein Lastenträger abgegeben wird.

Jedes Mal, wenn ein Ladungsträger im Inneren des Roboters gehandhabt wird, verwendet SOTO seine Sensoren, um den Behälter zu verfolgen. Die Behälterverfolgung prüft die korrekte Positionierung und kann zur Korrektur von Fehlausrichtungen verwendet werden.
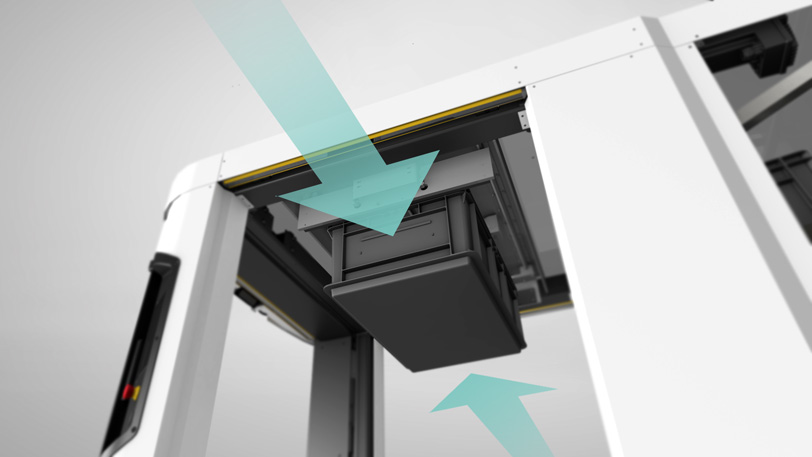
Wenn zum Beispiel ein Ladungsträger nach der Aufnahme aus dem Backpack oder einem Regal falsch auf dem Greifer ausgerichtet ist, kann SOTO die Fehlausrichtung mit einer in der Oberseite des Roboters über dem Greifer montierten Kamera erkennen. Der Roboter positioniert dann den Ladungsträger vor dem Absetzen neu.

Wenn die Ausrichtung des Lastenträgers nicht mit dem Backpack-Fach oder dem Regalfach übereinstimmt, dreht SOTO den Lastenträger um 90°. Dies wird durch die Klemmeinheit in der Decke über dem Greifer erreicht.
Sobald der Ladungsträger auf dem Greifer sitzt, wird er an die Oberseite des Roboters angehoben und fest eingespannt. Anschließend dreht sich der Greifer um 90° unter den Ladungsträger. Der Ladungsträger wird dann auf den Greifer losgelassen, sodass er richtig auf den Backpack oder das Regal ausgerichtet ist.
Alle Ladungsträger werden während des Transports im Backpack verstaut.

SOTO kann nicht fahren, während ein Lastenträger auf dem Greifer platziert ist.
Fehlerbehebung
Wenn ein Fehler auftritt, benachrichtigt SOTO das Personal in der Nähe mit Hilfe seiner Kontrollleuchten. Um Sie bei der Lösung des Problems zu unterstützen, zeigt SOTO auf seinem Display einen Fehlermeldung und eine Anleitung zur Wiederherstellung an.

Die Mitarbeiter können das Problem beheben, indem sie den Fehler quittieren und eine auf dem Bildschirm angezeigte Wiederherstellungsoption auswählen.
Aufladen
Sobald der Ladestand der Batterie unter einen bestimmten Wert fällt, steuert der Roboter automatisch eine Ladestation an. Die Ladestation arbeitet induktiv und funktioniert ohne physischen Kontakt.
Sobald die Batterie wieder aufgeladen ist, ist SOTO bereit für neue Sammeltransportaufträge.
Der Schwellenwert für die Batterieladung des Roboters kann während der Inbetriebnahme konfiguriert werden, um festzulegen, wann er mit dem Laden beginnt und den Betrieb wieder aufnimmt.