
UT01 - SOTO Einführung
Übersicht
Bis jetzt wurde die Produktionslogistik fast ausschließlich manuell durchgeführt. Fahrerlose Transportsysteme haben die Automatisierung vorangetrieben. SOTO geht noch einen Schritt weiter und bringt Materialien direkt an das Fließband, just-in-time und in verschiedenen Höhen direkt in das Zielfach - komplett autonom. Die Ersteinrichtung ist benutzerfreundlich und kann weitgehend selbständig vorgenommen werden.

SOTO arbeitet bis zu 20 Stunden am Tag und ermöglicht Prozesse, die nicht nur effizienter, sondern auch deutlich kostengünstiger sind. Seine Bedienung ist bewusst einfach gehalten und ermöglicht den parallelen Betrieb mit Menschen. Die Hardware ist extrem robust und auf maximale Zuverlässigkeit ausgelegt.
Die Materialflussautomatisierung mit SOTO passt sich nicht nur der Umwelt, sondern auch der steigenden Nachfrage an. Neue Roboter können ohne großen Aufwand direkt in eine bestehende Flotte integriert werden.
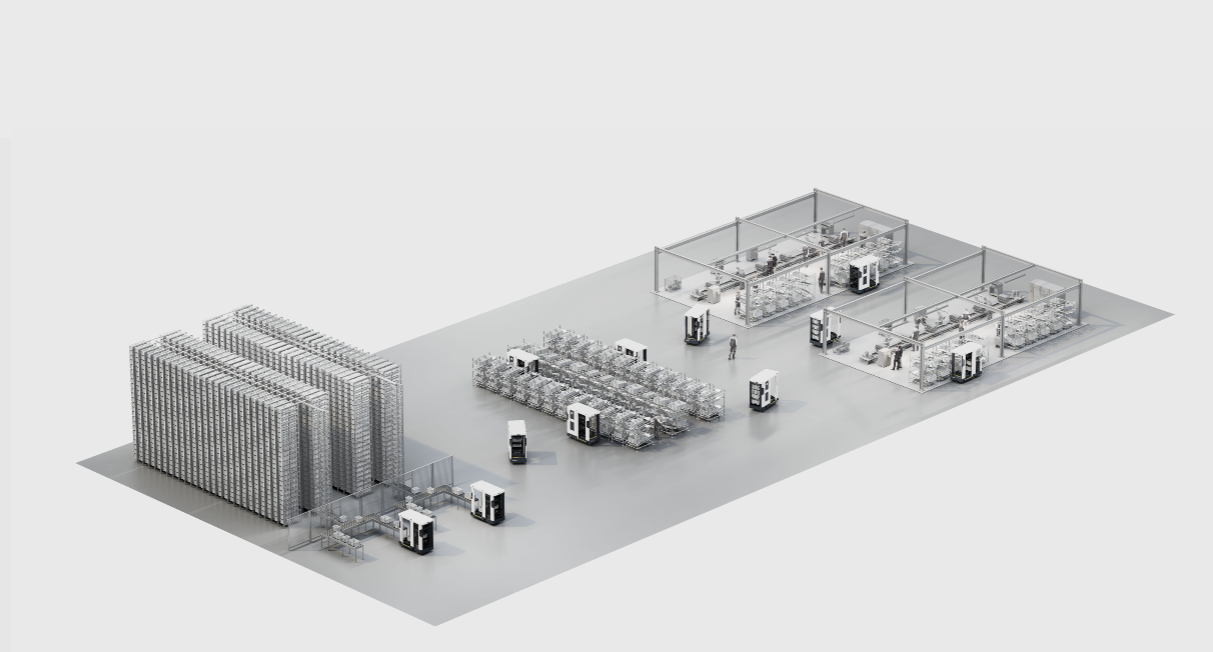
SOTO liefert eine komplette Intralogistiklösung. Die SOTO-Flotte schließt die Lücke zwischen automatisierten Kleinteilelagern und einer automatisierten Produktionslinie.
Mit seiner hohen Intelligenz ist SOTO in der Lage, komplexe Transportaufgaben selbstständig auszuführen und auf Veränderungen der Umgebung und der Nachfrage zu reagieren. Er kann Routenzüge vollständig ersetzen oder auch sinnvoll mit ihnen zusammenarbeiten.
Jeder SOTO kommissioniert und transportiert die in standardisierten Kleinladungsträgern gelagerten Waren zwischen Durchlaufregalen und automatischen Kleinteilelagern.

SOTO transportiert in der Regel zwischen 20 und 45 Ladungsträger pro Stunde in einer Standardbetriebsumgebung und sorgt für eine rechtzeitige und präzise Lieferung der Materialien an die gewünschten Einsatzorte.
In einer industriellen Produktionsumgebung könnte der Lieferprozess mit SOTO wie folgt aussehen:
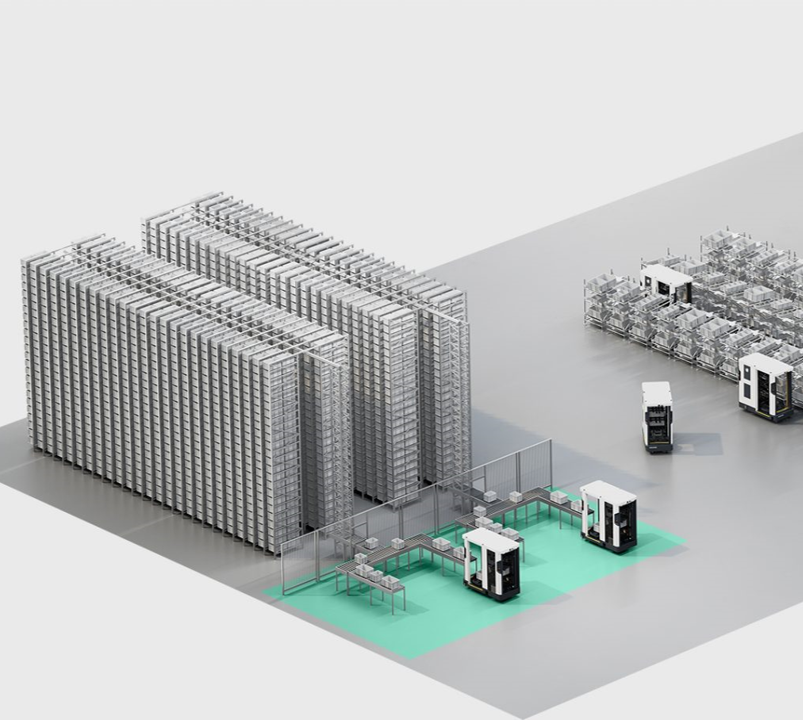
Automatisiertes Kleinteilelager
SOTO holt die Behälter direkt vom Förderband des automatischen Kleinteilelagers ab. Der Sammeltransportauftrag dafür kommt aus dem ERP-System. Leere Behälter können auf die gleiche Weise zurückgegeben werden.
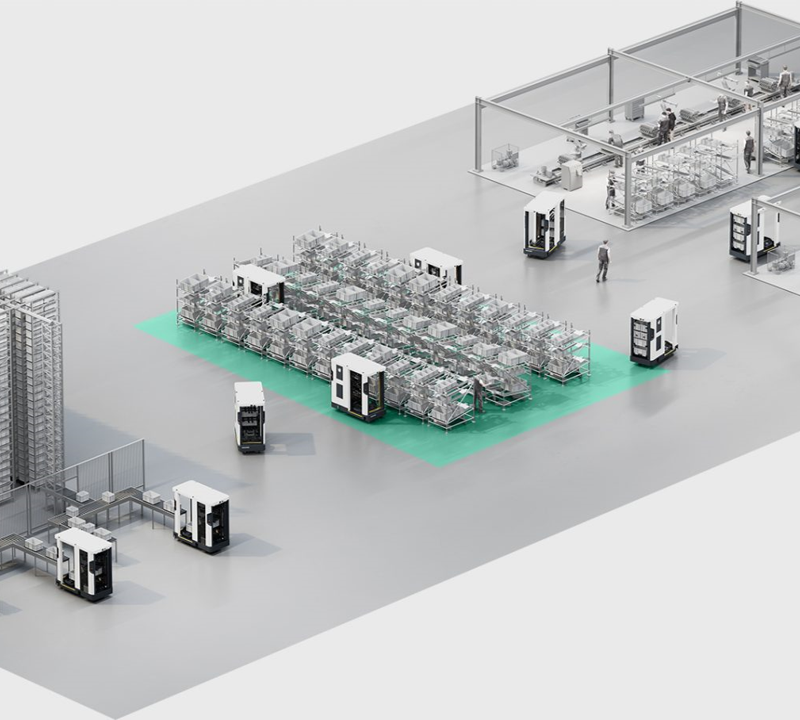
Supermärkte
SOTO übernimmt den Transport vom Lager zu den Puffersupermärkten und bis hin zur Produktionslinie.
Supermärkte sind in der industriellen Materialversorgung üblich, um die Reaktionszeiten zu verkürzen.
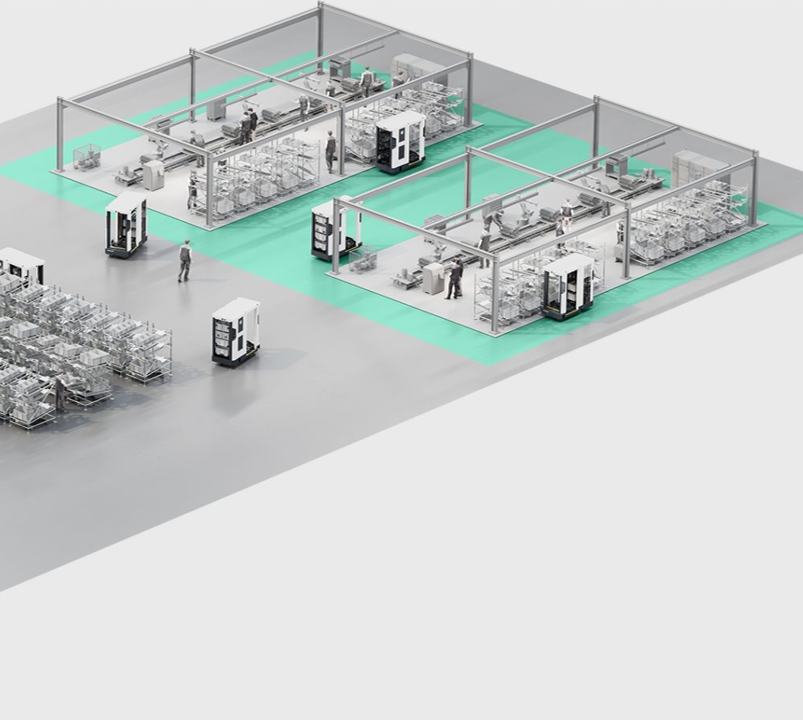
Produktionslinie
SOTO liefert die Behälter direkt in die Durchlaufregale an der Produktionslinie. Das richtige Material, zur richtigen Zeit, am richtigen Ort. Vollautomatisch und kontinuierlich.
Leere Behälter werden abgeholt und in das automatische Kleinteilelager zurückgebracht.
SOTO
Um SOTO erfolgreich zu betreiben, müssen der Roboter, die transportierten Objekte und die physische Umgebung, die für den Betrieb verwendet wird, alle kompatibel sein.

Relevante technische Daten von SOTO und Umweltanforderungen für eine erfolgreiche Roboterintegration:
Technische Daten des Roboters
Physikalischer Fußabdruck | 2146 × 1060 mm |
Virtueller Fußabdruck mit kleinem Sicherheitsfeld | 2430 x 1280 mm |
Höhe | 2240 mm |
Leergewicht | 733 kg - 777 kg |
Maximale Nutzlast | 207 kg - 251 kg |
Höchstgeschwindigkeit | 1,5 m/s |
Arbeitszeit ohne Laden | Bis zu 8 Stunden |
Ladezeit | 1,6 Stunden (Verhältnis 5:1) |
Kleinladungsträger-Transport
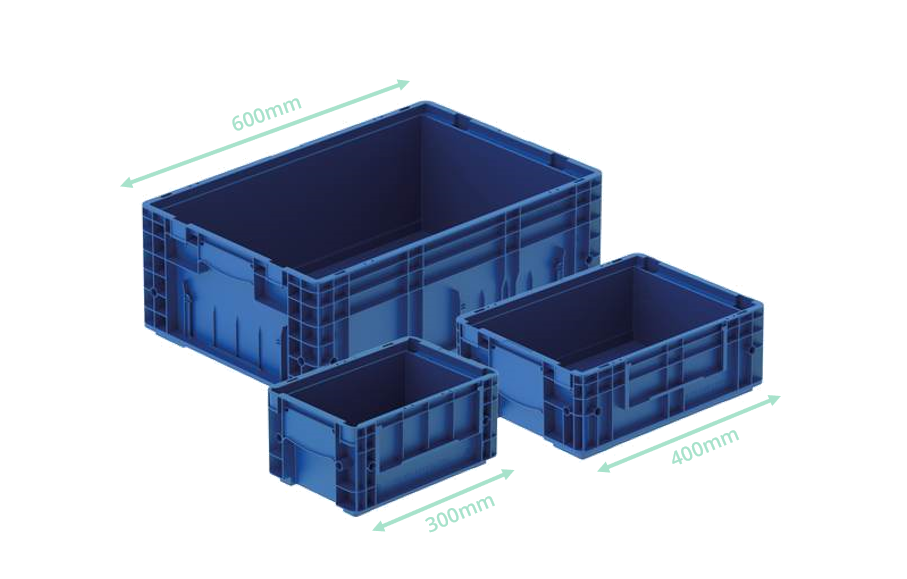
SOTO unterstützt Kleinladungsträger nach VDA 4500 (R-KLT, RL-KLT) und vergleichbare Kleinladungsträger.
Minimale Greifhöhe | 400 mm (seitliches Greifen) |
Maximale Greifhöhe, seitliches/frontales Greifen | 1700mm wenn Behälterhöhe <= 220mm |
Abmessungen der unterstützten Behälter | 300 × 200 mm |
Maximales Gewicht pro Behälter | 20 kg (gleichmäßig verteilt) |
Unterstützte Behälterhöhen | 80 - 320 mm (keine Gegenstände, die aus dem Behälter herausragen), die Breite muss immer größer sein als die Höhe |
Max. Anzahl der KLTs pro Roboter | 8 (600×400 mm) – 24 (300×200 / 400x300 mm) |
Schwerpunkt der Ladung | max. 2/3 zu einer Seite |
Platzbedarf
Empfohlen | Maximum | |
Gangbreite zum langsamen Fahren | 1800 mm | 1650 mm |
Gangbreite zum schnellen Fahren | 2800 mm | 2510 mm |
Höhe des Durchgangs während des Betriebs | 2280 mm |
Detailliertere Anforderungen an den Fahr-Korridor finden Sie im SOTO-Datenblatt.
Die Korridore müssen in jeder Höhe frei gehalten werden. Insbesondere müssen Regaladapter bei der Messung der Korridorbreite berücksichtigt werden.
Boden
Empfohlen | Maximum | |
Maximale Bodenspaltbreite zum Überfahren | 0 mm | 10 mm |
Höhe der befahrbaren Boden Unebenheiten | 0 mm | 5 mm |
Maximale Bodenneigung | 0° | |
Tragfähigkeit des Bodens | 1000 kg |
Zusätzliche Bodeneigenschaften nach DIN 18202 - Industrieböden.
Betriebsbedingungen
Temperaturbereich | 15 °C – 35 °C |
Maximale Temperatur (kurzzeitig, bis zu 1h) | 40 °C |
Luftfeuchtigkeit | < 95%, nicht kondensierend |
Boden | trocken |
Beleuchtung | keine direkte "horizontale" Lichtquelle |
Komponenten
SOTO ist modular aufgebaut, wobei jede Komponente eine bestimmte, unabhängige Aufgabe erfüllen soll.
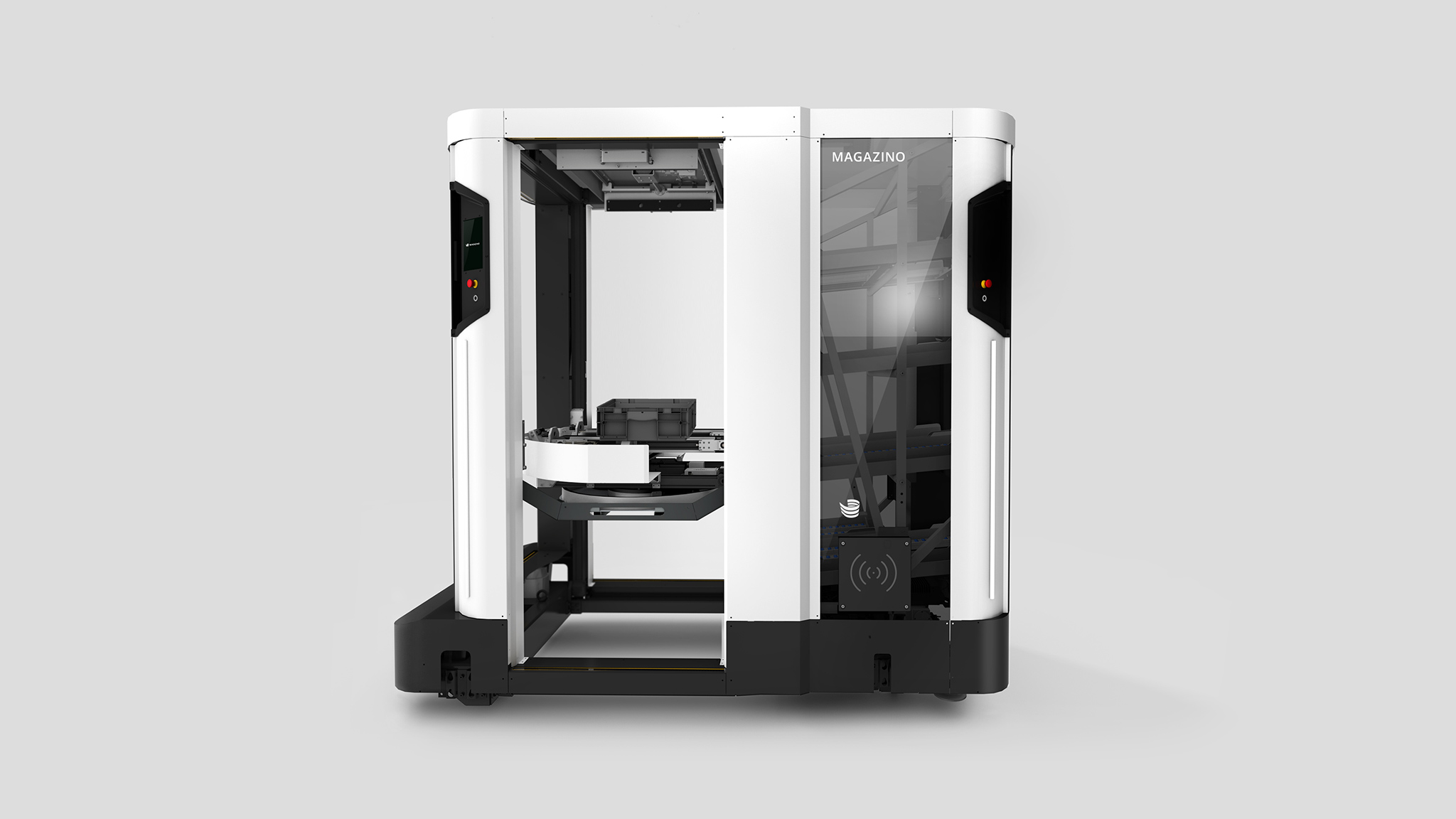
Es gibt fünf Hauptkomponenten:

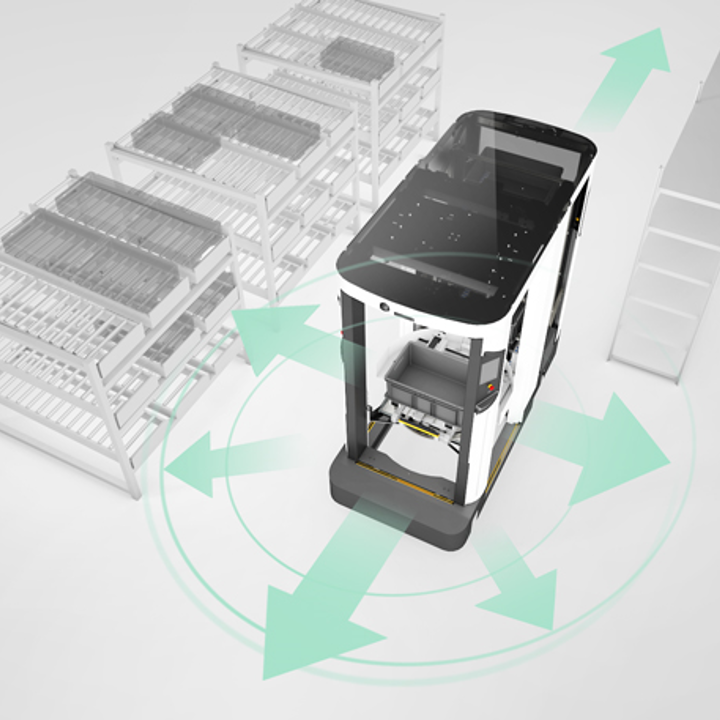
Fahrbasis
Der omnidirektionale Antrieb ermöglicht präzises Manövrieren auch auf engstem Raum.
Mit 3D-Kameras an der Vorder- und Rückseite und einem Lokalisierungs-Laserscanner an der Oberseite kann der Roboter selbstständig navigieren und auf Veränderungen in der Umgebung reagieren.
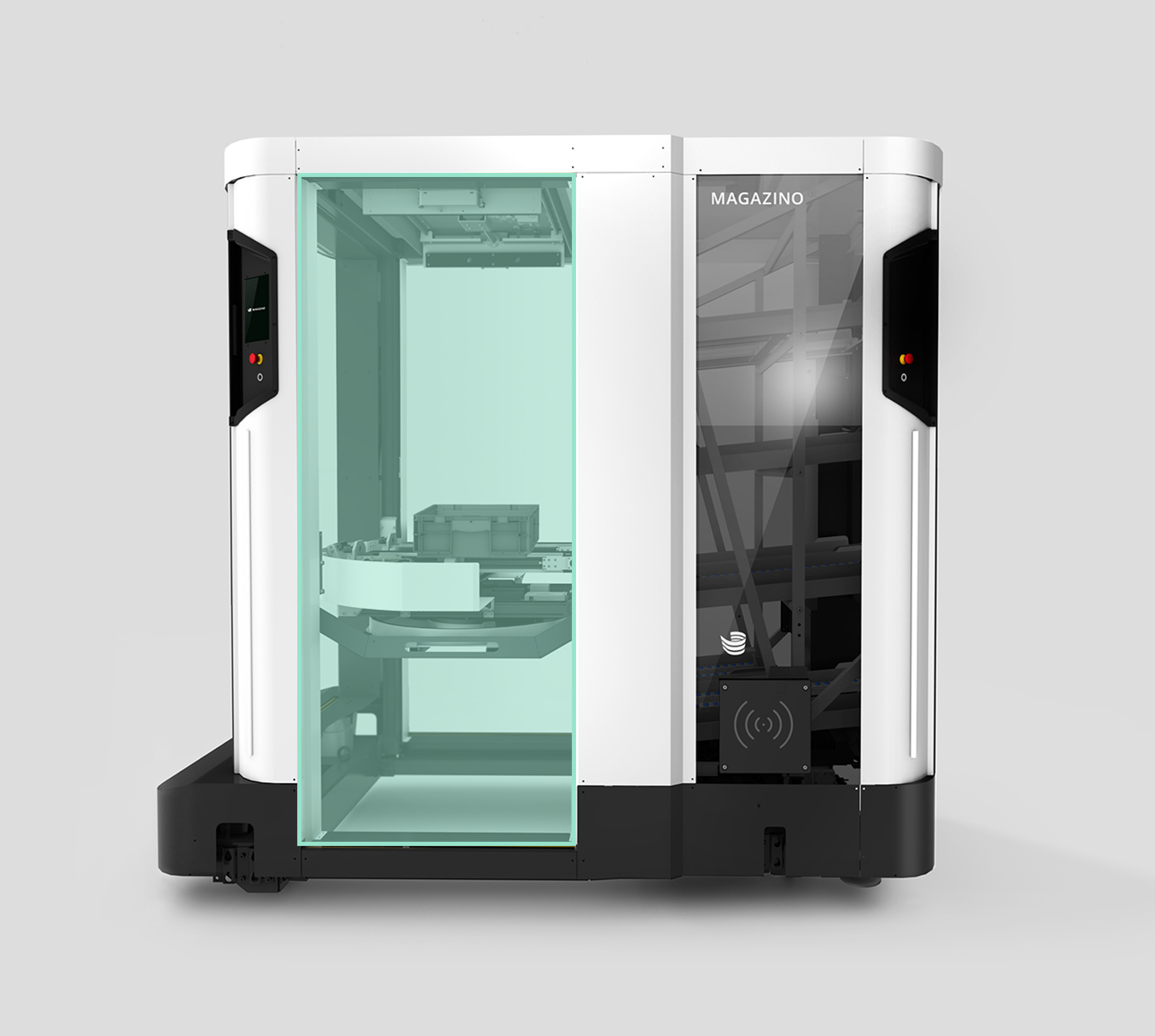
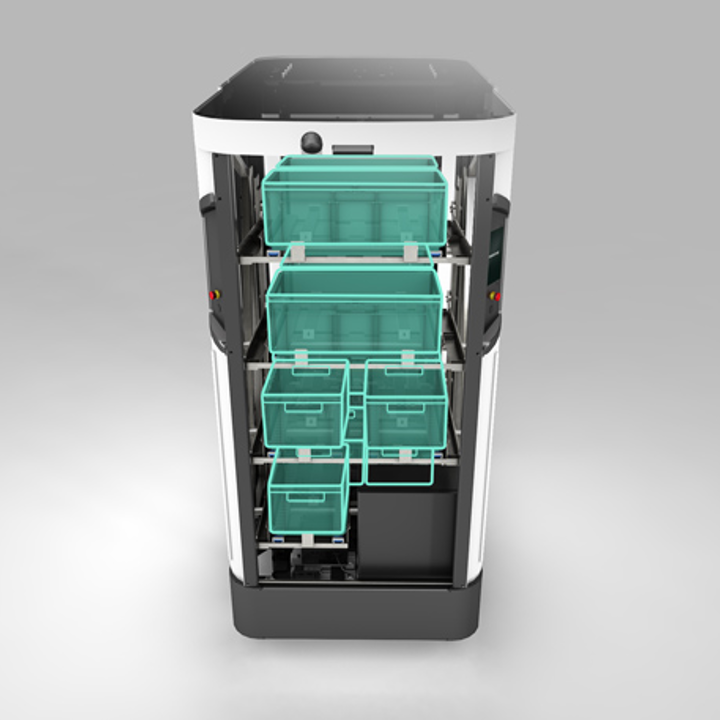
Backpack
SOTO kann mehrere Behälter im Fahrzeug zwischenlagern und zwischen Quelle und Senke transportieren. Die Backpack-Anordnung kann nach Kundenwunsch konfiguriert werden, um auf jeder Tour eine maximale Auslastung zu erreichen.
Der Backback ist doppelttief - das heißt, dass in jedem Fach mehr als ein identischer Behälter hintereinander gelagert werden kann. Behälter können mit einer Kippmechanik entnommen werden.
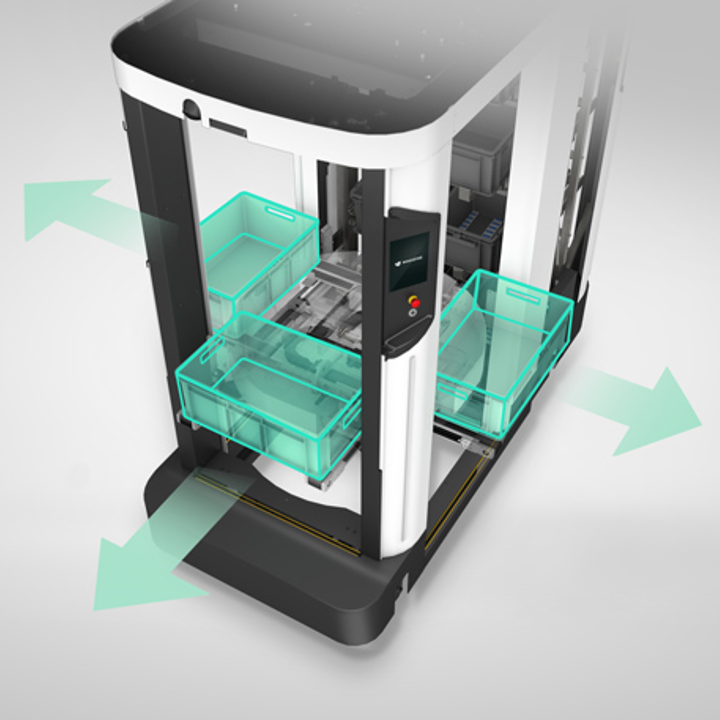
Greifer
Der Förderbandgreifer kann sich in der Höhe bewegen sowie Ladungsträger in allen vier Richtungen abgeben und aufnehmen - frontal, seitlich links und rechts sowie rückwärts in den Backpack. Ausgestattet mit einer Reihe von Sensoren kann der Greifer die gelagerten Behälter erkennen und sogar Ausrichtungsfehler kompensieren.
Die gegriffenen Ladungsträger können in einer Presse im oberen Bereich des Roboters gehalten werden, während der Greifer darunter rotiert, um die Ausrichtung des Ladungsträgers innerhalb des Roboters zu ändern.
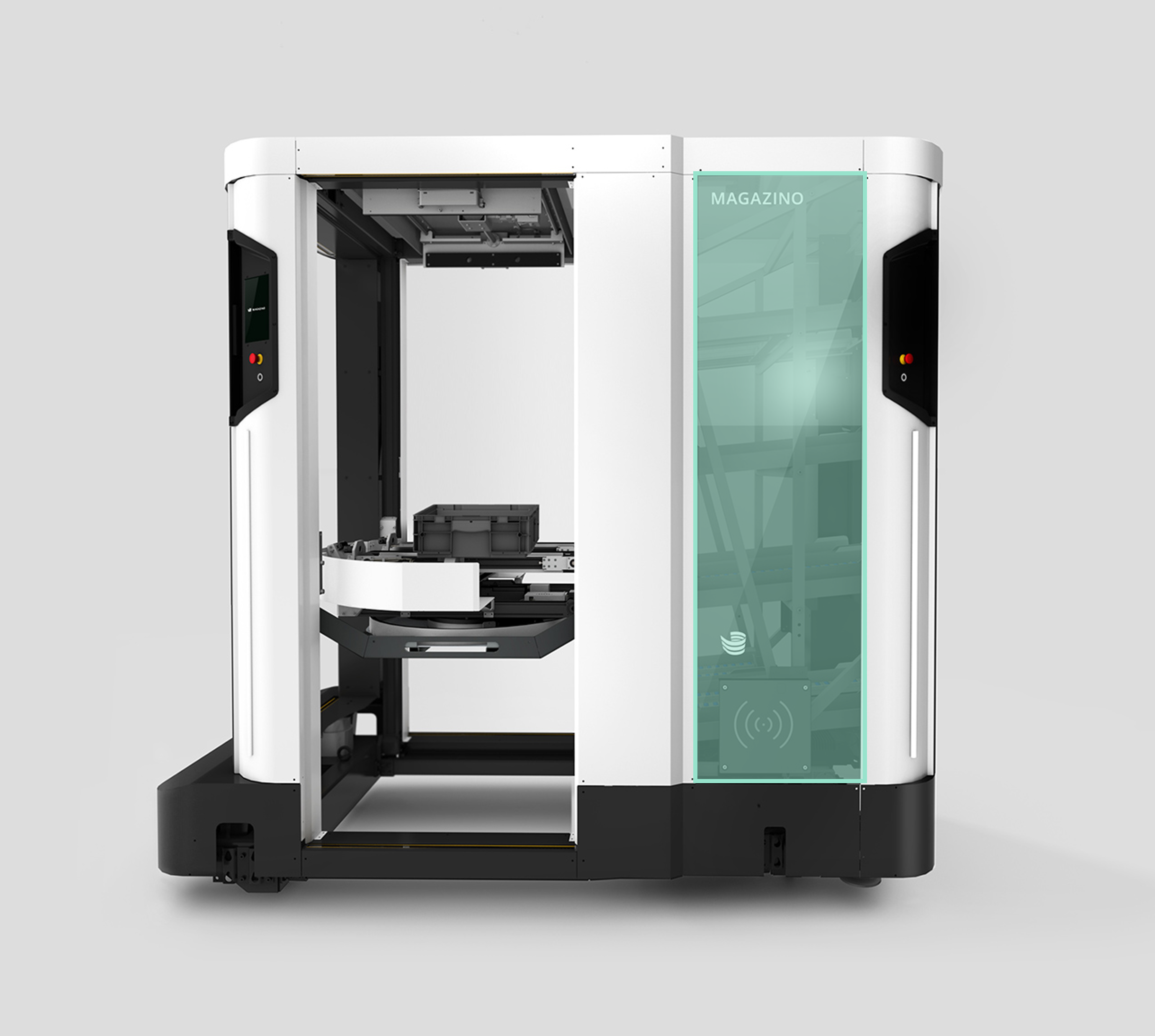
Sicherheit
Zertifizierte Sicherheits-Laserscanner an der Vorder- und Rückseite ermöglichen es dem SOTO, mit einer Geschwindigkeit von bis zu 1,5 m/s frei zu navigieren. Sie garantieren auch einen sicheren Betrieb parallel zu Menschen und anderen Fahrzeugen.
Je nachdem, wie nah ein Hindernis kommt, reduziert SOTO automatisch seine Geschwindigkeit, bis er anhält oder eine alternative Route sucht.
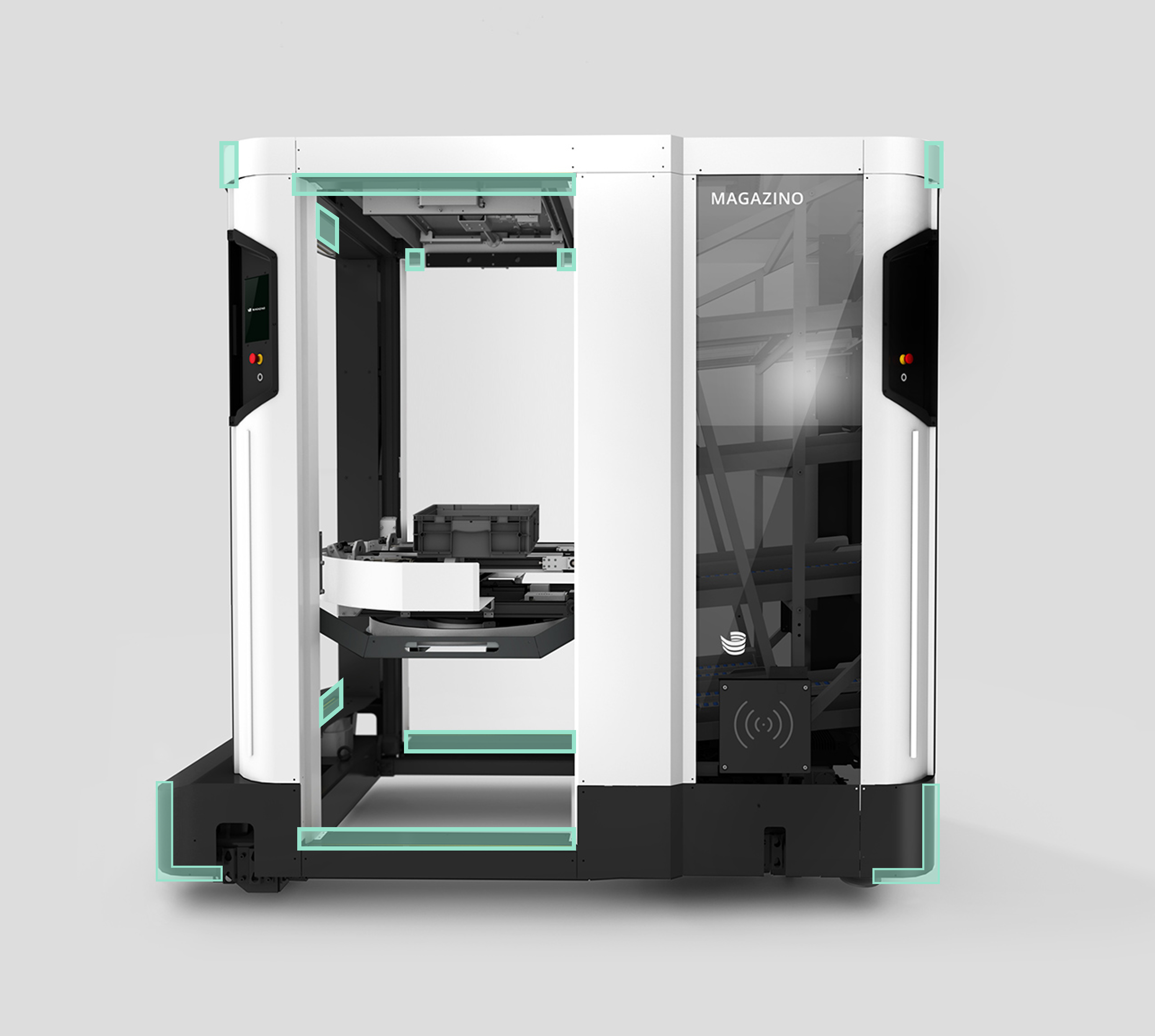
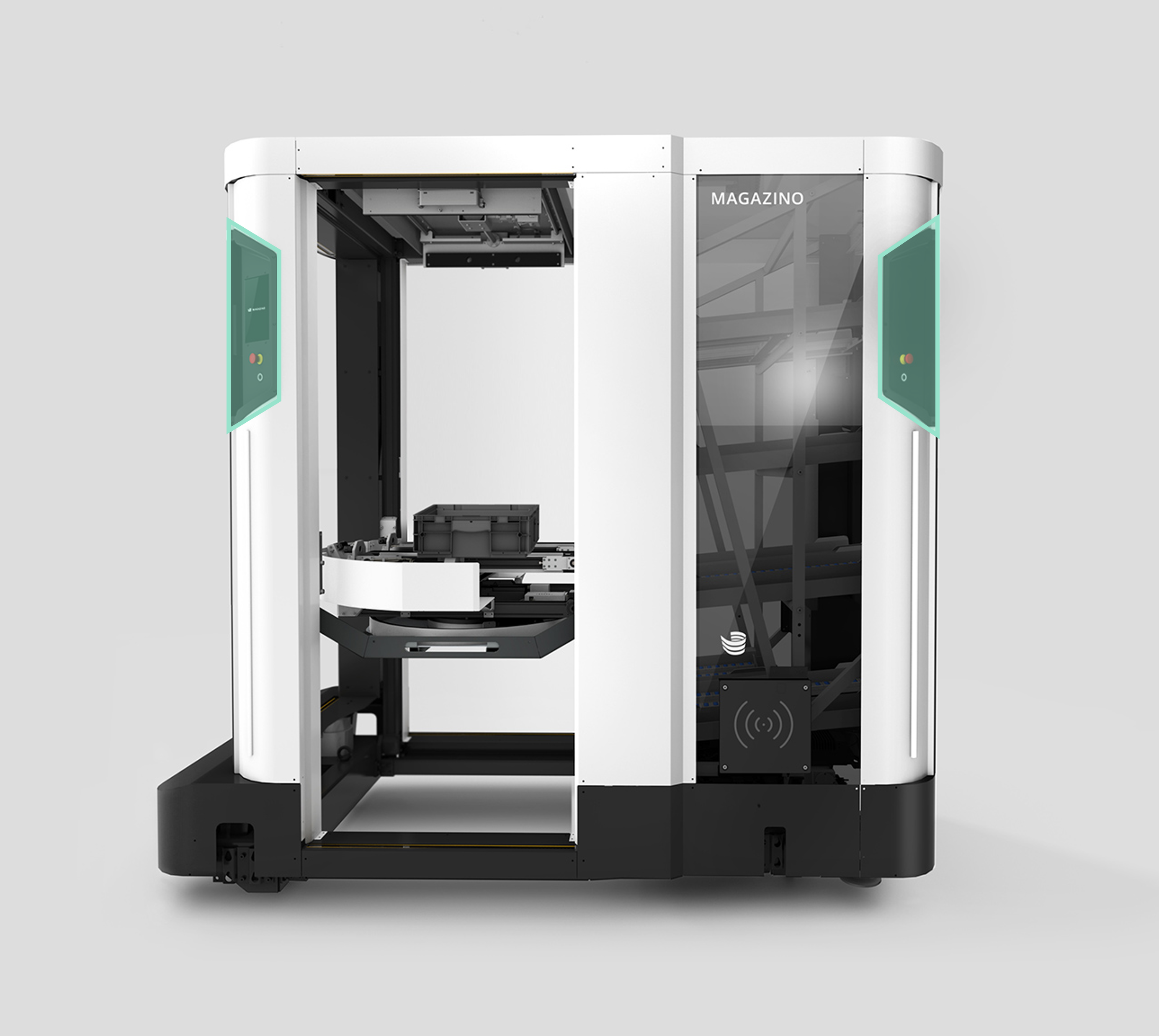
SOTO Display
Wenn menschliche Interaktion erforderlich ist, zeigen Touch-Displays die relevanten Informationen an und ermöglichen eine intuitive Bedienung durch Mitarbeiter direkt am Roboter.
Zusammenfassung
Zusammengefasst sind die wichtigsten Eigenschaften von SOTO:
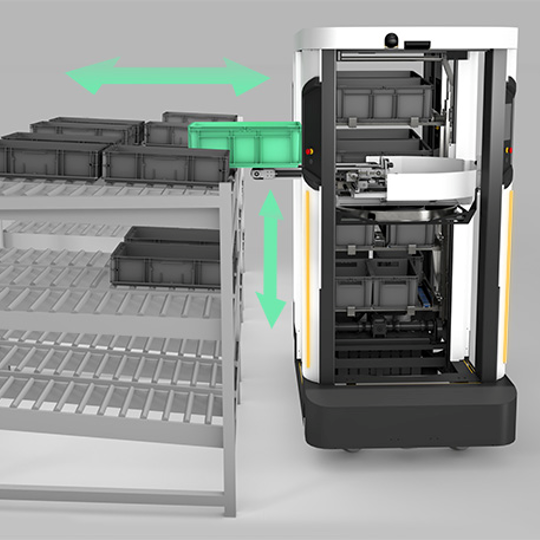
Flexible Übergabehöhe von 400 mm bis zu 1700 mm je nach Höhe des Ladungsträgers
Erforderliche Mindestgangbreite von 1650 mm und eine maximale Geschwindigkeit von 1,5 m/s mit natürlicher Navigation

Betriebsdauer von 8 Stunden mit einer Ladung, Li-Ion-Akku (Lithium-Eisenphosphat-Akku)
Der Backpack kann 8 bis 24 Ladungsträger aufnehmen und kann je nach Kundenwunsch konfiguriert werden.
Handhabung von Standard-Ladungsträgern (300x200 mm, 400x300 mm, 600x400 mm) an drei Seiten des Roboters und im Backpack

Maximales Ladungsträgergewicht von bis zu 20 kg bei einer Gesamtnutzlast von bis zu 240 kg