
EUT08 - Roboterkomponenten
Übersicht
SOTO 2.1 verfügt über einen Förderbandgreifer, der Ladungsträger aufnehmen und absetzen kann. Die gegriffenen Ladungsträger können in der Ladungsträgerpresse im oberen Bereich des Roboters gehalten werden, während der Greifer unter dem Ladungsträger rotiert. Auf diese Weise kann die Ausrichtung der Ladungsträger während der Platzierung bestimmt werden.
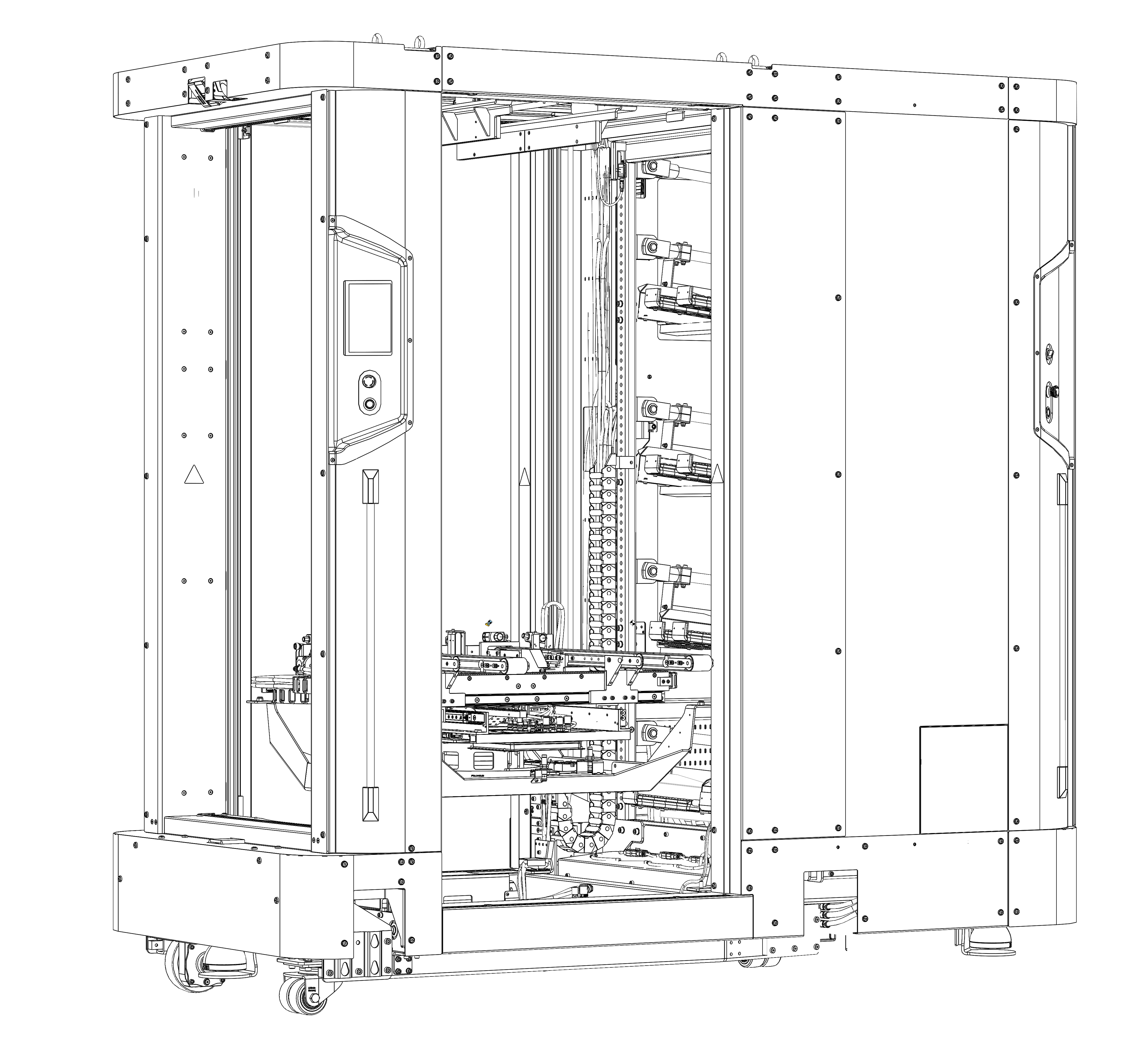
Aufgenommene Ladungsträger können im Rucksack zwischengelagert werden. Das Rucksackregal kann an verschiedene Arten und Größen von Ladungsträgern angepasst werden. Das Fassungsvermögen des Rucksackregals hängt von den verwendeten Lastenträgern ab.
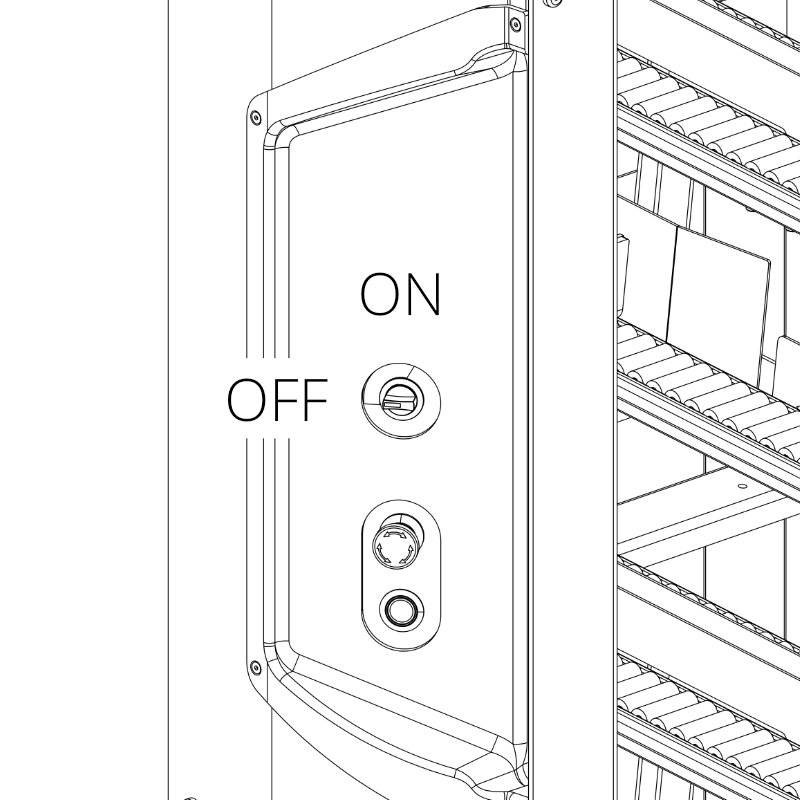
Batterietrennschalter / Hauptschalter
Der Batterietrennschalter befindet sich hinten links am Roboter. Er wird verwendet, um den Roboter von der Batterie zu trennen.
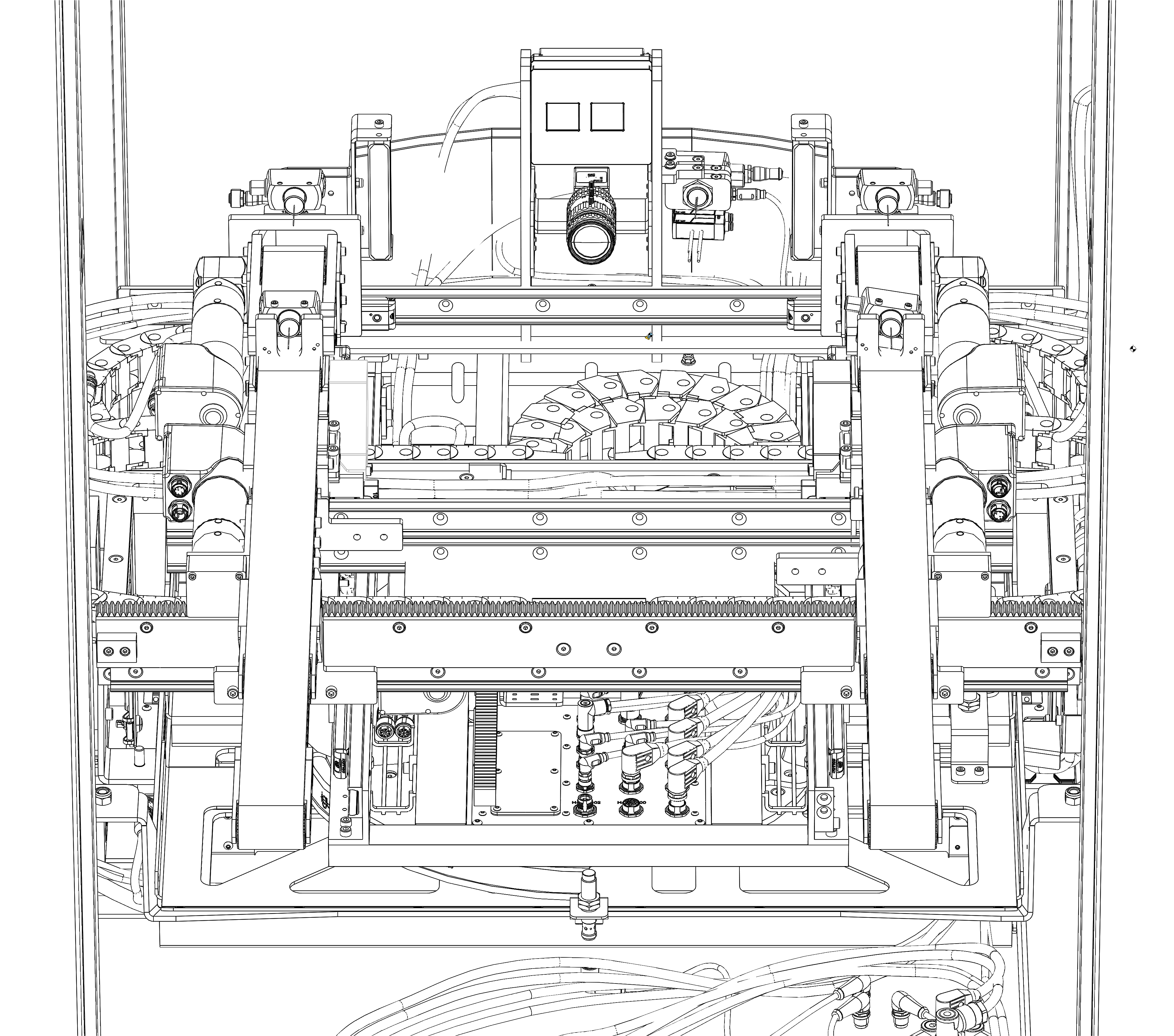
Greifer
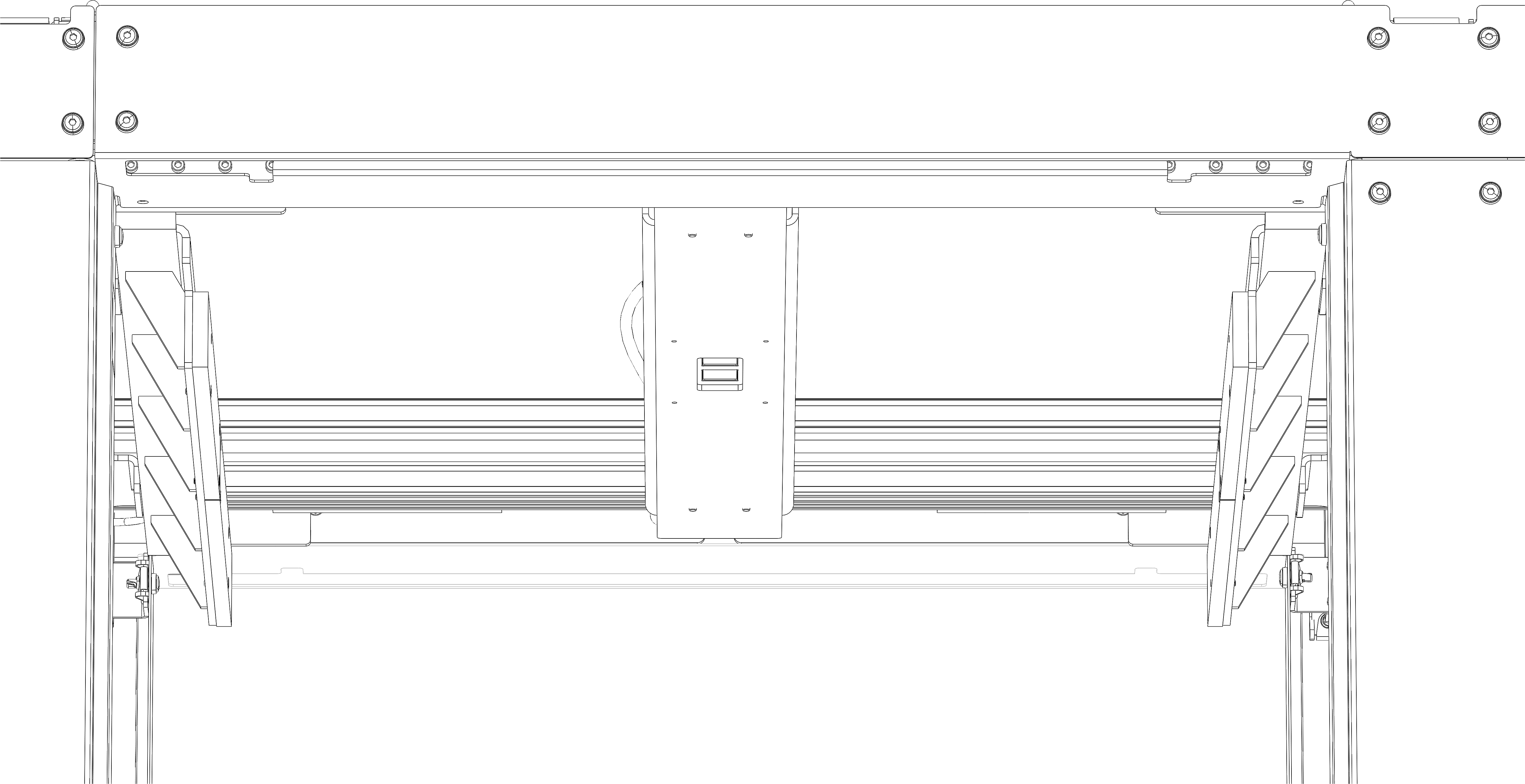
SOTO 2.1.1 ist mit einem Förderbandgreifer ausgestattet. Die Ladungsträger liegen auf den Förderbändern und können so aufgenommen und abgesetzt werden.
Der Greifer wird automatisch in mehreren Achsen an den Ladungsträger angepasst.
Gewicht des Greifers | Maximales Gewicht pro Ladungsträger |
|---|---|
126 kg | 20 kg |
Ladungsträgerpresse
Die Ladungsträgerpresse wird verwendet, um einen Ladungsträger zu halten, während der Greifer unter dem Ladungsträger rotiert. Auf diese Weise kann die Ausrichtung des Ladungsträgers während der Platzierung bestimmt werden.
 | Hinweis! |
|---|---|
Die Ladungsträgerpresse kann nur KLT-Ladungsträger aufnehmen. Ladungsträger, die nicht der VDA 4500 entsprechen (R-KLT, RL-KLT), werden von der Ladungsträgerpresse standardmäßig nicht unterstützt. Ladungsträger, die von der VDA 4500 (R-KLT, RL-KLT) abweichen, aber ähnliche Eigenschaften haben, müssen vor der Freigabe für die Ladungsträgerpresse geprüft werden. |
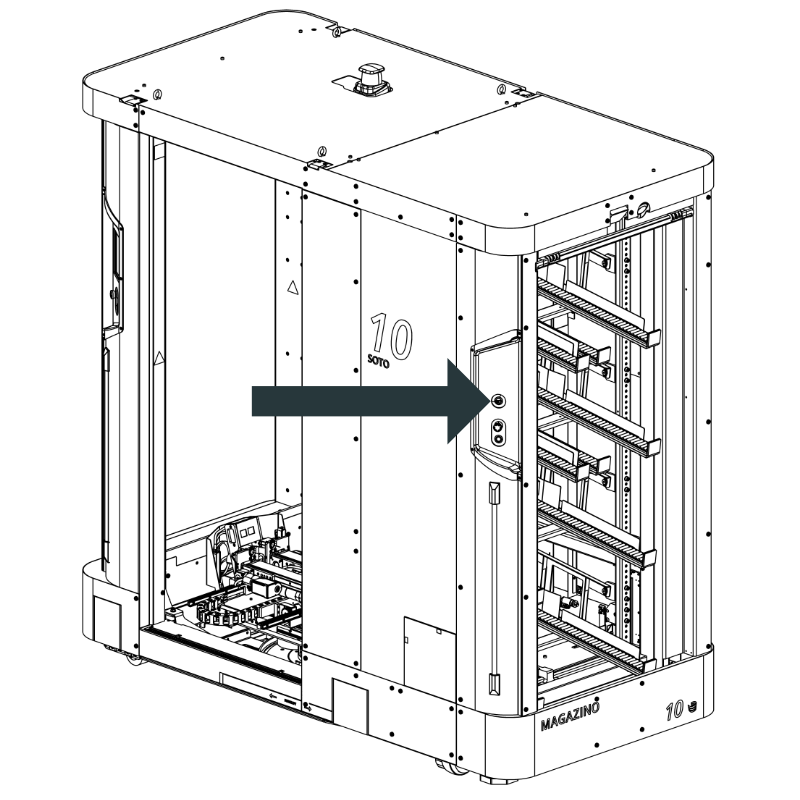
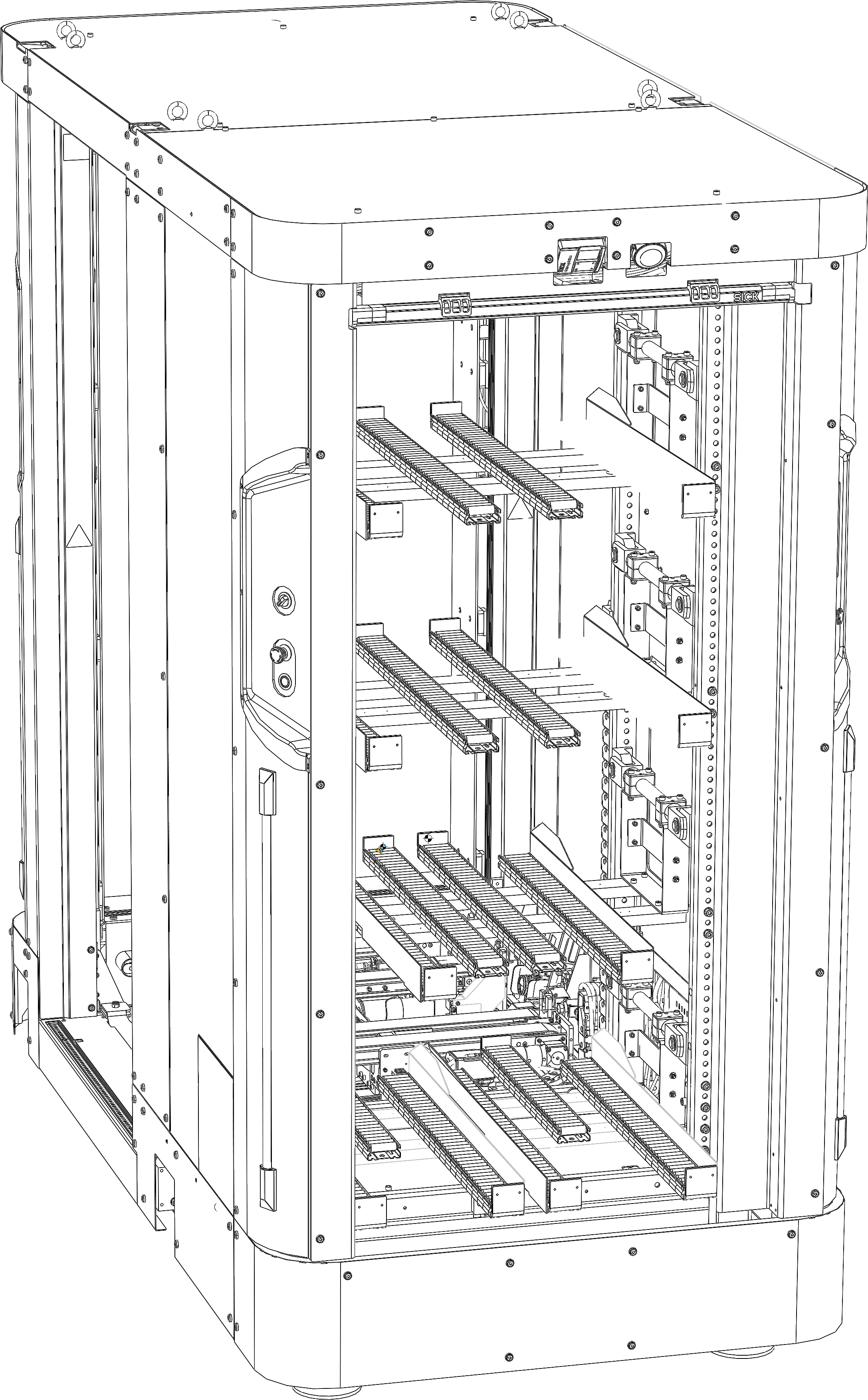
Rucksackregal
Der Rucksack wird zur Zwischenlagerung der aufgenommenen Ladungsträger verwendet. Er kann individuell an die vorhandenen Ladungsträger angepasst werden. Er verfügt über einen Kippmechanismus zum Kippen der Ladungsträger.
Das Fassungsvermögen des Rucksacks hängt von den verwendeten Lastenträgern ab.
| Hinweis! |
|---|---|
Die Ladungsträger im Rucksack werden nicht überwacht. Entfernen Sie keine Ladungsträger aus dem Rucksack, wenn Sie nicht ausdrücklich dazu aufgefordert werden. Entnommene Ladungsträger müssen ggf. manuell in das Lagerverwaltungssystem übertragen werden. |
Akku
Produktkategorie | Modellname | Nennkapazität einer Zelle | Durchschnittliche Betriebsspannung einer Zelle |
|---|---|---|---|
Lithium-Ionen-Akkupack (Lithium-Eisen-Phosphat-Akku) | LIPY041WWPCSY6 | 21 Ah | 25,6 V DC (je zwei Zellen in Reihenschaltung zur Versorgung der Systembetriebsspannung von 48 V DC) |
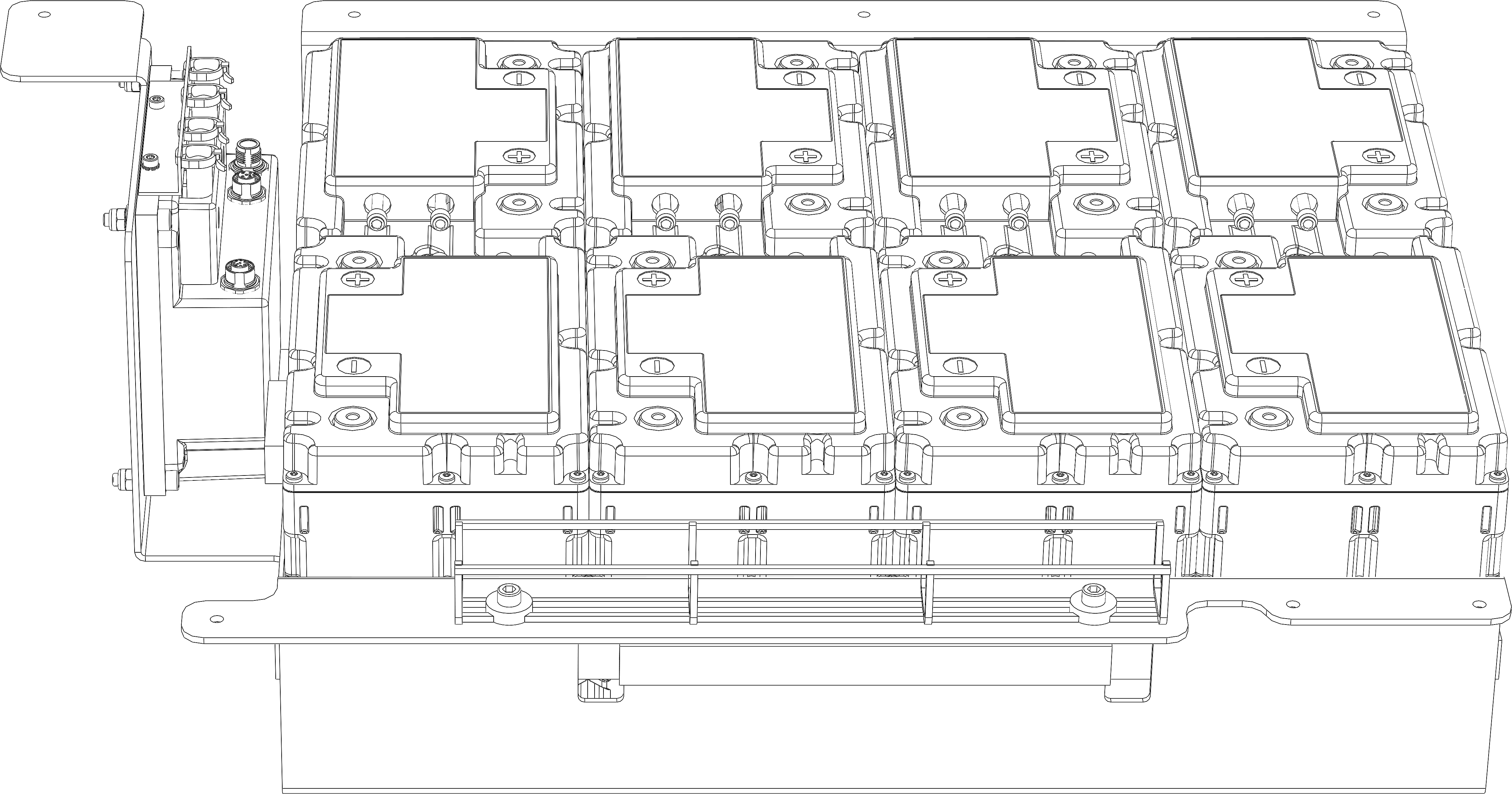
Die verwendeten Akkus sind grundsätzlich wartungsfrei. Bei der vorgeschriebenen Jahresinspektion sind die Akkus und die angeschlossenen Kabel durch eine Sichtprüfung auf ihren einwandfreien Zustand hin zu überprüfen.
Die bestimmungsgemäße Verwendung der Batterien stellt keine besonderen Anforderungen an die Arbeitsumgebung.
Die Batterien können über den Hauptschalter vom System getrennt werden.
.png?inst-v=623fd237-c9af-448b-8290-279da381d7b9) | Warnung! |
|---|---|
Brandgefahr! Der Elektrolyt ist brennbar. Vermeiden Sie Kurzschlüsse an den Anschlussklemmen der Akkus. Entfernen Sie Roboter mit beschädigten Akkus aus Bereichen in denen eine Brandgefahr besteht. |
| Warnung! |
|---|---|
Gefahr durch Gase! Gase, die bei der Verbrennung von Akkus entstehen, können Reizungen der Augen, der Haut und des Rachens verursachen. |
| Hinweis! |
|---|---|
Die Batterien müssen mindestens einmal pro Woche vollständig aufgeladen werden, um eine Abnutzung der Batterien zu verhindern. Wenn die Batterien nicht in regelmäßigen Abständen vollständig aufgeladen werden, kann sich dies negativ auf die Batterieladung auswirken oder die Batterien können beschädigt werden, so dass sie ersetzt werden müssen. |
| Hinweis! |
|---|---|
Die Akkus dürfen nur mit dem mitgelieferten Ladegerät geladen werden. Wenn die Akkus nicht richtig geladen werden, schaltet sich das Akkusystem automatisch ab. Bei extremer Überschreitung der Ladeparameter können die Akkus beschädigt werden. |
Induktionsfläche am Roboter

SOTO 2.1.1 arbeitet mit kontaktloser induktiver Aufladung. Der Roboter fährt automatisch in die Ladeposition. Die Induktionsfläche des Roboters kommuniziert mit der Induktionsfläche des Ladegeräts. Erst wenn sich beide Geräte gegenseitig erkannt haben, wird das Ladegerät aktiviert und der Roboter geladen.
| Achtung! |
|---|---|
Verbrennungsgefahr! Die Induktionsflächen am Roboter und am Ladegerät können während des Ladevorgangs heiß werden. |
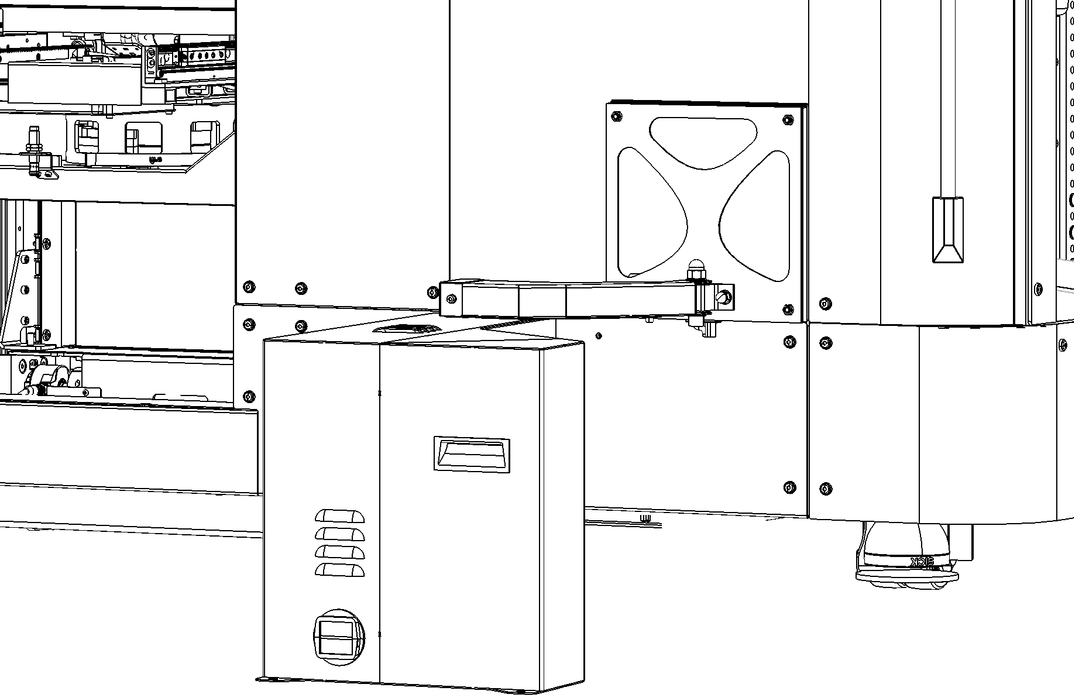
Ladegerät
SOTO 2.1.1 arbeitet mit kontaktloser induktiver Aufladung. Der Roboter fährt automatisch in die Ladeposition. Die Induktionsfläche des Roboters kommuniziert mit der Induktionsfläche des Ladegeräts. Erst wenn sich beide Geräte gegenseitig erkannt haben, wird das Ladegerät aktiviert und der Roboter geladen.
Input | Output | ||
|---|---|---|---|
Eingangsspannung | 1-phasig, 230 V~ +/- 10 % | Nennspannung | 48 V DC |
Eingangsfrequenz | 50/60 Hz | Max. Ausgangsspannung | 60 V DC |
Eingangsleistung | 3,3 kW | Min. Ausgangsspannung | 15 V DC |
Stromverbrauch | 16 A | Max. Ausgangsleistung | 3 kW |
Anschluss | 230V-Steckdose CEE 16A 1-phasig | Max. Ausgangsstrom | 60 A DC |
| Warnung! |
|---|---|
Stromschlaggefahr! Das Ladegerät wird mit 230 V versorgt. Arbeiten am Ladegerät dürfen nur von Elektrofachkräften durchgeführt werden. Trennen Sie das Ladegerät von der Stromversorgung, bevor Sie das Ladegerät öffnen. |
| Achtung! |
|---|---|
Verbrennungsgefahr! Das Ladegerät wird während des Ladevorgangs heiß. Das Gehäuse des Ladegeräts muss während des normalen Betriebs geschlossen sein. |
| Hinweis! |
|---|---|
Die Akkus dürfen nur mit dem mitgelieferten Ladegerät geladen werden. Wenn die Akkus nicht richtig geladen werden, schaltet sich das Akkusystem automatisch ab. Bei extremer Überschreitung der Ladeparameter können die Akkus beschädigt werden. |