
EUT06 - Magazino Operations Center
Magazino Operations Center Einführung
Das Magazino Operations Center ist eine integrierte Cloud-Plattform zur Verwaltung von SOTO-Flotten. Es ermöglicht Benutzern, ihre Arbeitsumgebung zu modellieren, ihre Flotte zu überwachen und Roboteraufträge zu verwalten. Das Magazino Operations Center ist eine Grundfunktion des Magazino Fleet Managers und wird für alle SOTO-Projekte benötigt.

Das Magazino Operations Center ist immer erforderlich, um SOTO zu betreiben, unabhängig davon, ob ein externer Master Controller verwendet wird.
Cloud Hosting
Alle Instanzen von Magazino Fleet Manager werden auf der Google Cloud Platform (GCP) gehostet.
Die Gründe für die Verwendung eines in der Cloud gehosteten Modells sind:
Schnelle Bereitstellung: Die Instanz kann innerhalb von 15 Minuten ohne Investitionskosten für Hardware bereitgestellt werden.
Reduzierte IT-Belastung: Google übernimmt die Verwaltung der Infrastruktur (incl. Einrichtung, Kubernetes-Bereitstellung, Workload-Management und Sicherheitsupdates).
Immer auf dem neuesten Stand: Der Kunde verfügt immer über die neuesten Funktionen, während Google kontinuierlich Sicherheitsupdates bereitstellt.
Datensicherheit: Google bietet eine leistungsstarke Verschlüsselung und erfüllt die Standards SOC 2 Typ 2, ISO 27001 und PCI DSS.
Kostenoptimiert: Keine Vorabkosten oder unerwartete Wartungsgebühren.
Skalierbarkeit: Schnelle Anpassung an die Anforderungen der Flotte dank der skalierbaren Kubernetes-Plattform von Google mit 99,9 % Verfügbarkeit.
Zugangsverwaltung
Der Zugriff auf das Magazino Operations Center erfolgt sicher über die Authentifizierung mit einem autorisierten Microsoft-Konto.
Die autorisierten Konten für jede Magazino Operations Center-Instanz werden von Magazino verwaltet.
Live-Ansicht
Die Live-Ansicht ermöglicht es Benutzern, eine aktive SOTO-Flotte zu überwachen und mit ihr zu interagieren.
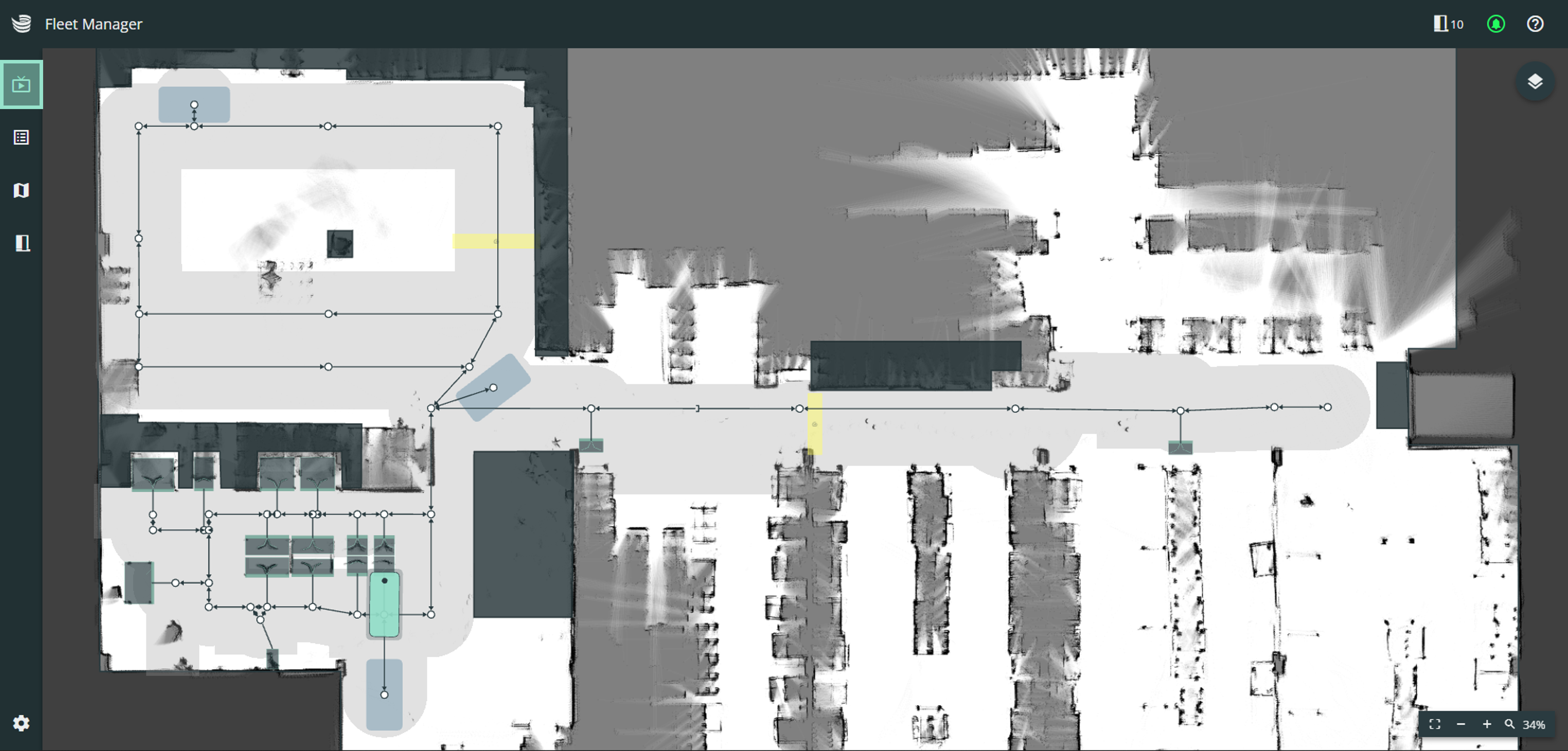
Die Live-Ansicht bietet eine Lokalisierungskarte, die alle im Modellierungswerkzeug hinzugefügten Objekte enthält. Dazu gehören Hindernisse, Übergabestationen, Ladestationen und die Route mit ihren Verbindungen, Knotenpunkten und erlaubten Fahrbereichen.
Die Live-Ansicht ist die Startseite, wenn Sie das Magazino Operations Center aufrufen.
Die Live-Ansicht bietet die folgenden Funktionen:
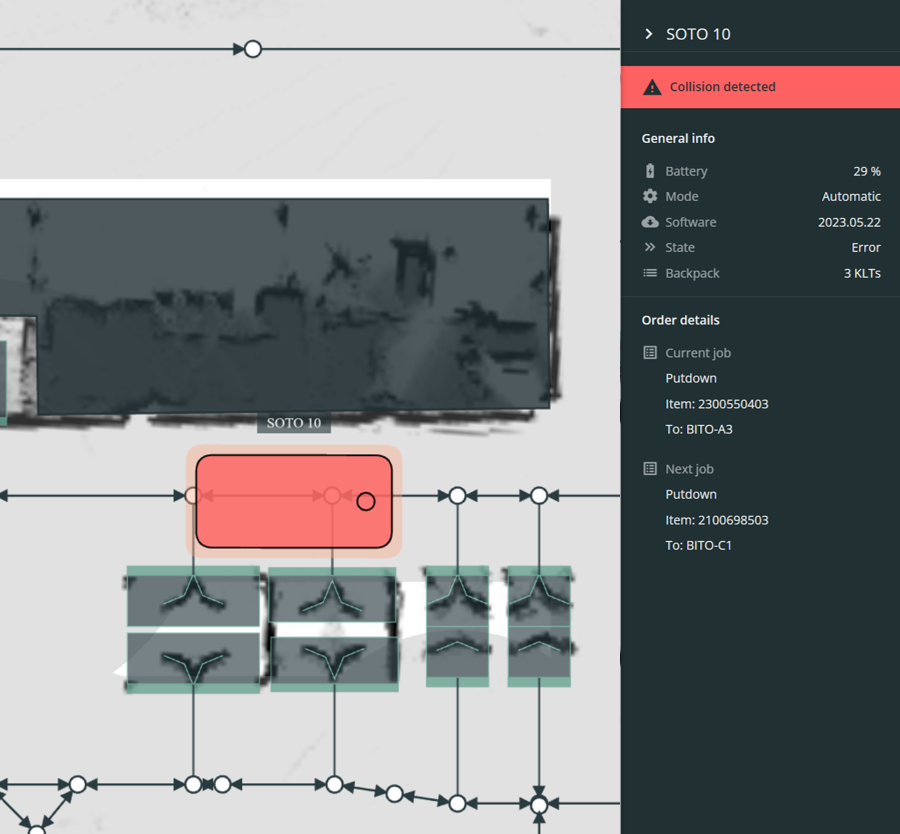
Roboterstatus
Der Status jedes SOTO wird entweder in rot oder grün angezeigt. Wenn Sie auf den Roboter klicken, wird eine detaillierte Liste mit dem Status des Roboters und den Debugging-Optionen angezeigt.
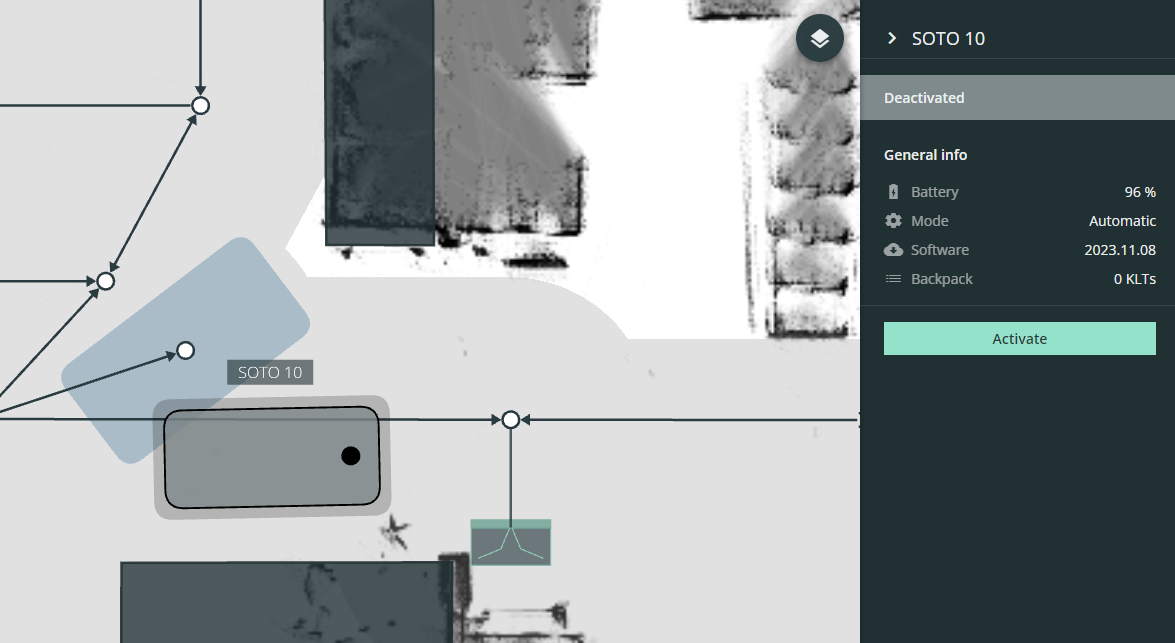
SOTO Management
Jedes SOTO kann auch aktiviert oder deaktiviert werden.
Wenn ein Roboter deaktiviert wird, nimmt er keine Transportaufträge mehr an und bleibt auf seiner Position.

Regal Details
Durch Auswahl eines Regals können Sie die Details der Fächer einsehen.
 | Das Anpassungsmenü befindet sich in der rechten oberen Ecke der Live-Ansicht. |
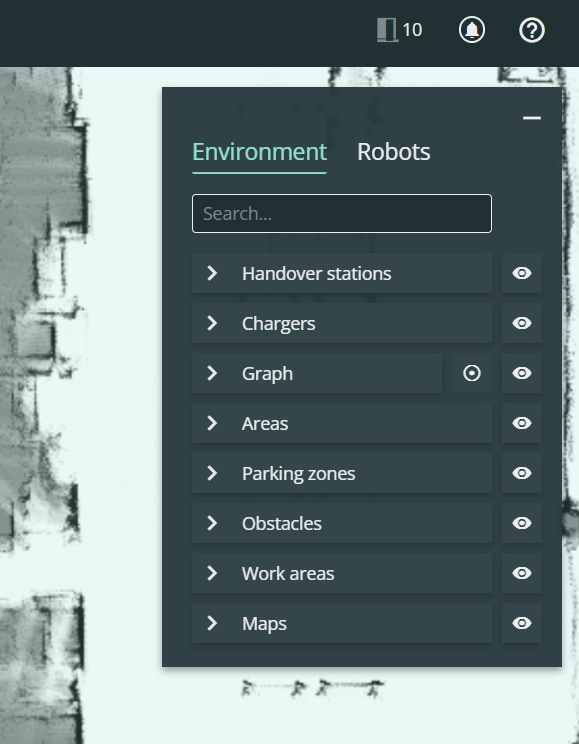
Umgebung
Auf der Registerkarte "Umgebung" werden alle verfügbaren Komponenten angezeigt und die Ansicht kann angepasst werden.
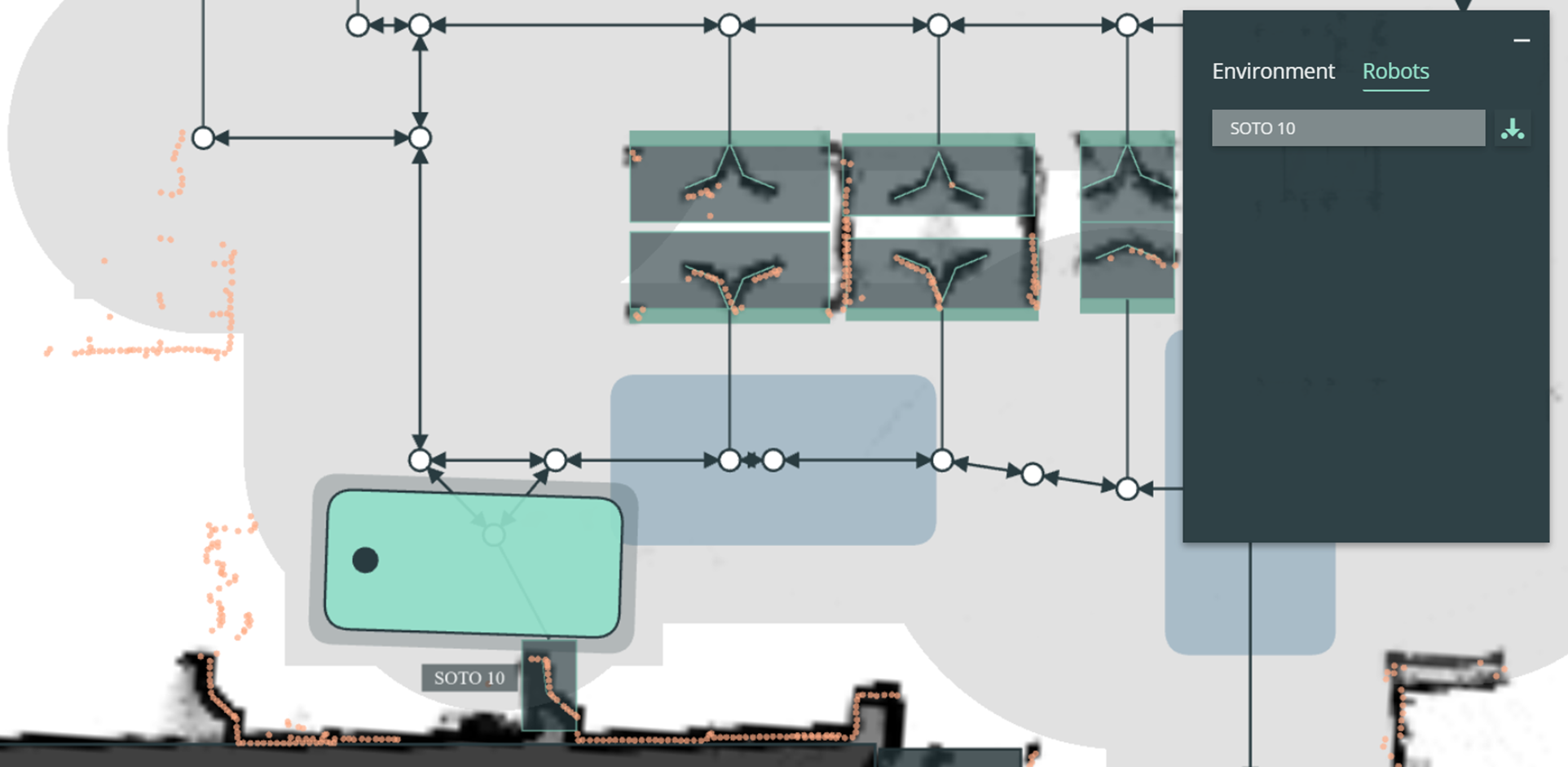
Roboter
Auf der Registerkarte "Roboter" kann jeder verbundene SOTO überprüft werden.
Sie können auch die Live-Laserscannerdaten für jedes SOTO anzeigen. Dies ist besonders hilfreich bei der Fehlersuche und der Positionierung von Komponenten.
Auftragsmanager
Mit dem Auftragsmanager können Sie Transportaufträge verwalten und überwachen sowie manuelle Transportaufträge erstellen.
Der Auftragsmanager dient zum Einrichten von Sammeltransportaufträgen oder zur Einsicht in aktuelle und frühere Aufträge. In einer aktiven Umgebung werden die Transportaufträge vom Master Controller und dem WMS an den Roboter übertragen. Der Auftragsmanager ist für die Einrichtung von Sammeltransportaufträgen oder für die Einsicht in aktuelle und frühere Aufträge gedacht.
Der Sammeltransportauftrag ist nur verfügbar, wenn auch der Master Controller von Magazino bereitgestellt wird. Wenn ein Master Controller eines Drittanbieters verwendet wird, werden alle Transportaufträge in diesem System angezeigt.
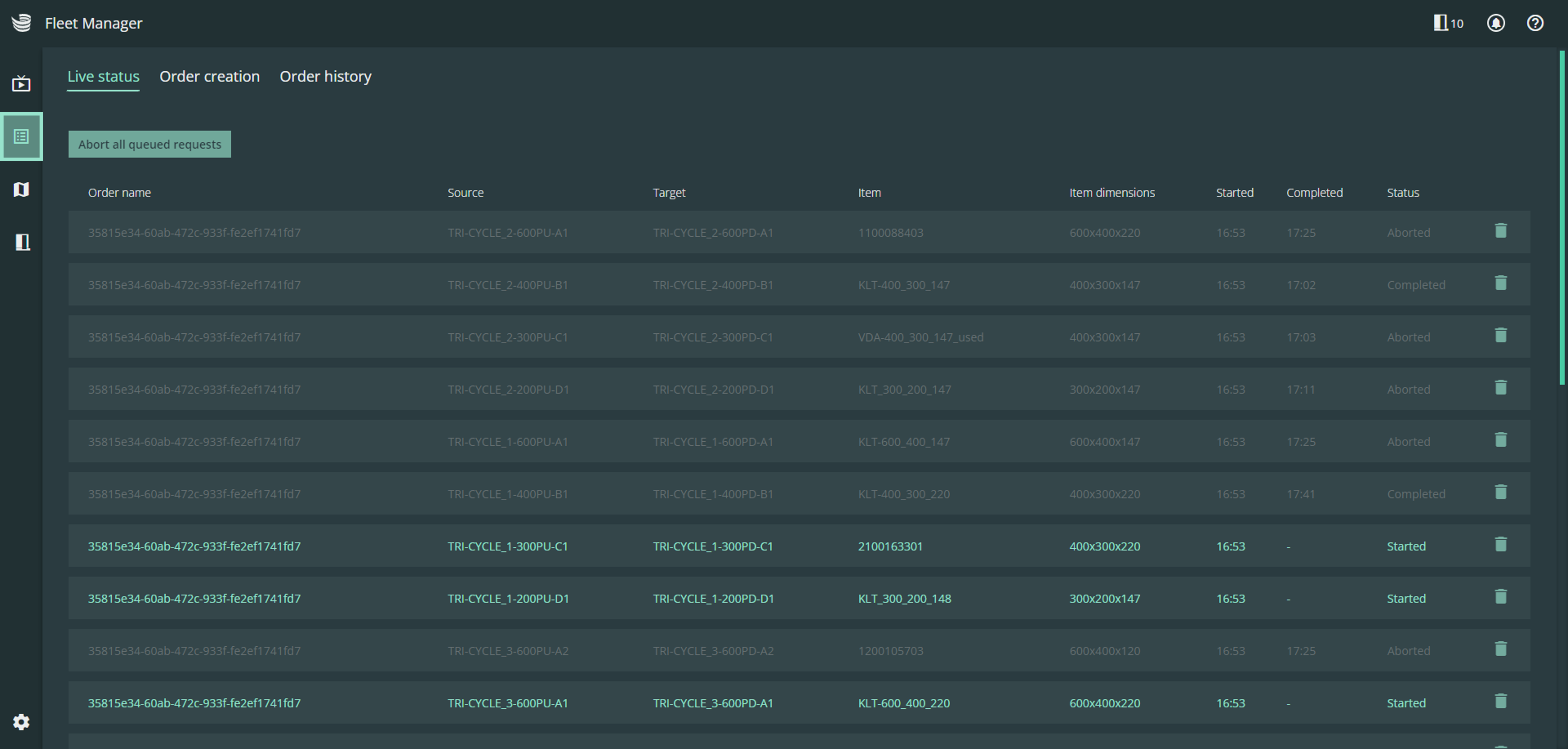
Live-Status
Der Live-Status zeigt den gerade aktiven Transportauftrag mit zusätzlichen Informationen wie Quelle, Senke und Ladungsträger-Dimensionen.
Auftragserstellung
In der Auftragserstellung können Sie manuelle Transportaufträge erstellen.
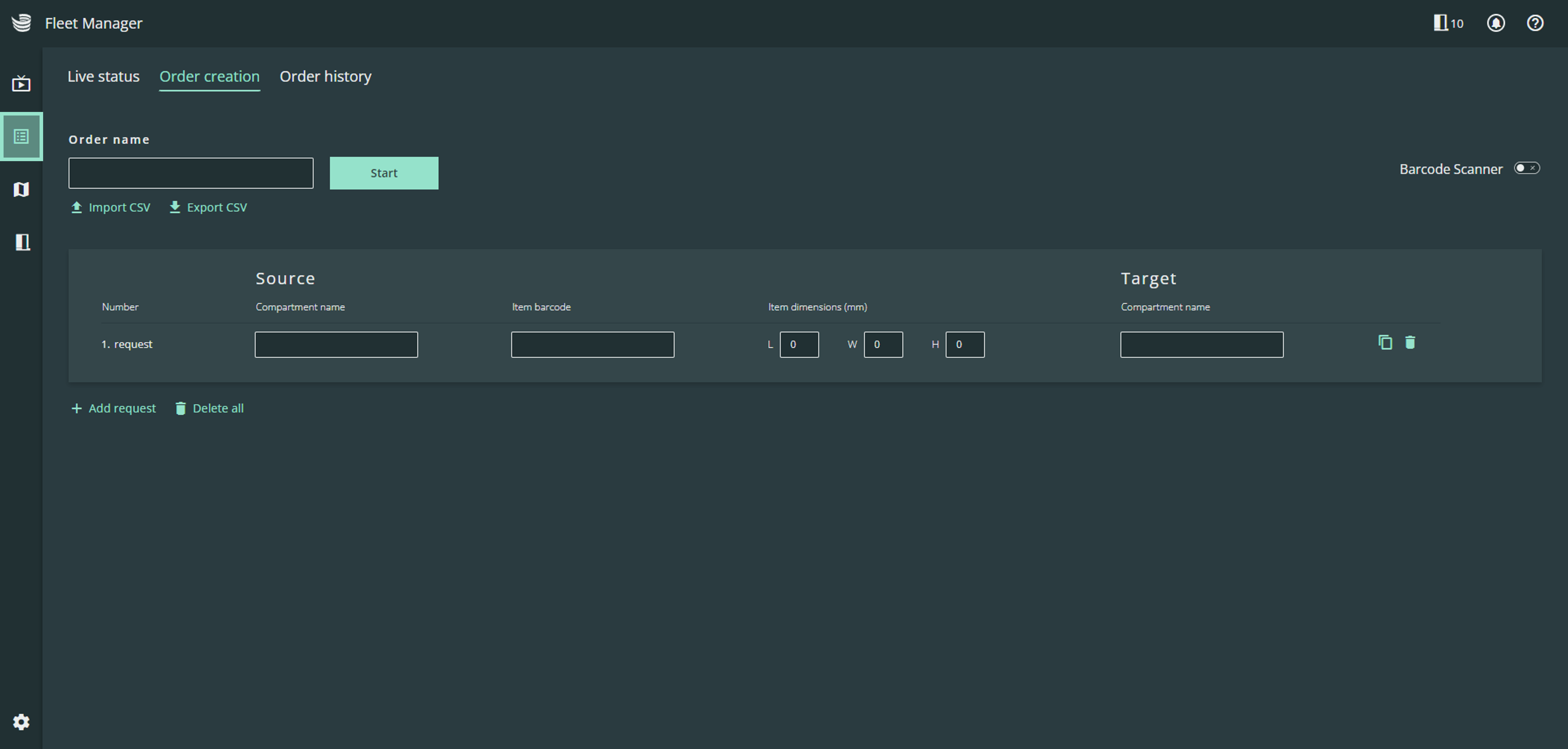
Um einen Transportauftrag zu erstellen, benötigen Sie die folgenden Informationen:
Name (Sammeltransportauftrag)
Quelle:
Quellfachname wie auf dem Docking Adapter angegeben
Ladungsträger (KLT) Barcode
Abmessungen Ladungsträger (KLT) (Länge x Breite x Höhe)
Ziel:
Zielfachname wie auf dem Docking Adapter angegeben
Die Verwendung eines tragbaren Barcode-Scanners erleichtert die Erstellung eines Sammeltransportauftrags erheblich. Wenn Sie die Eingabemethode auf den Barcode-Modus (oben rechts) umschalten, springt der Cursor nach jedem Scanvorgang automatisch in das nächste Feld.
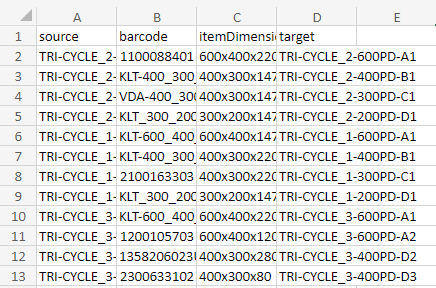
Es ist auch möglich, einen Transportauftrag als CSV-Datei einzugeben:
Sammeltransportauftrag Historie
In der Auftragshistorie können Sie frühere Transportaufträge einsehen.
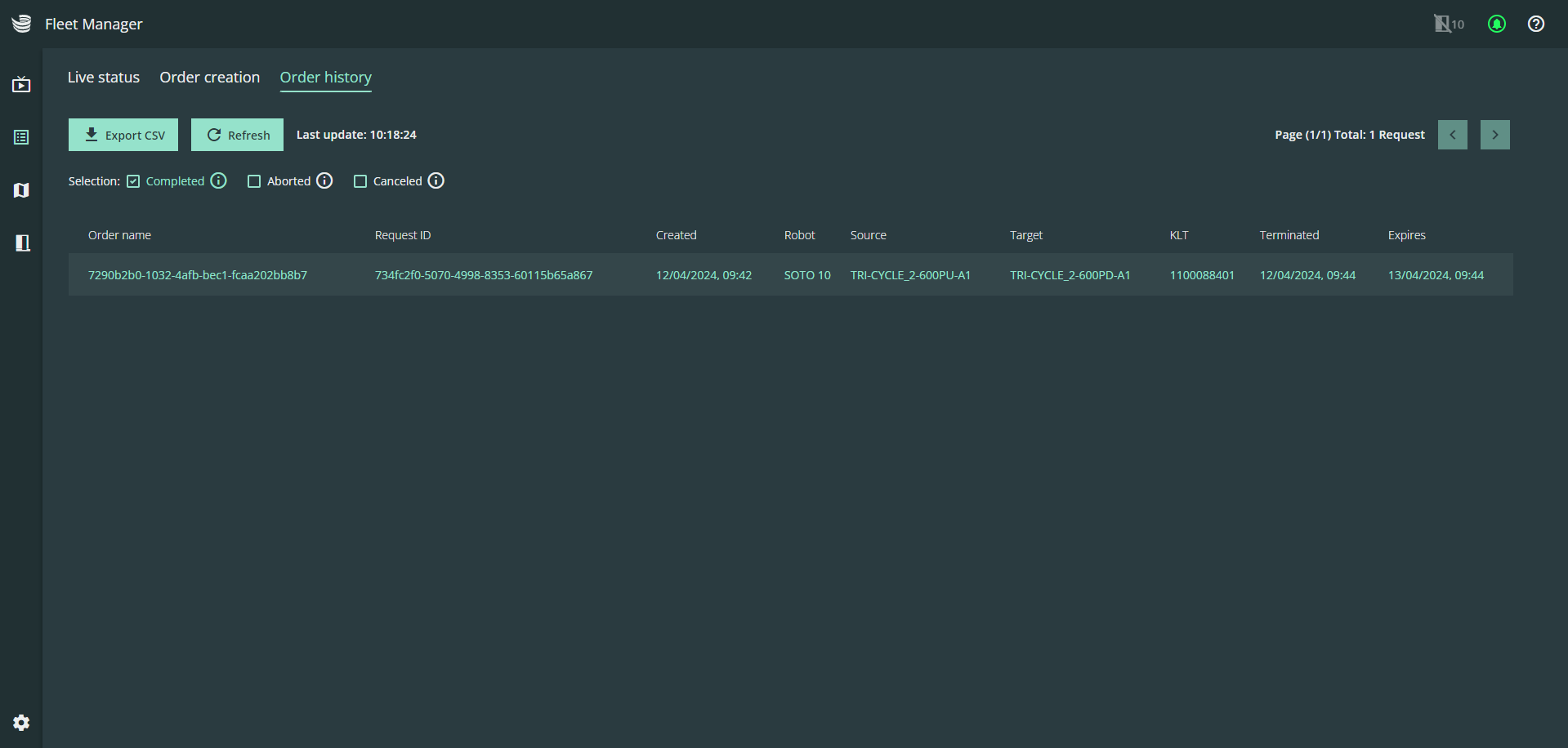
Alle Sammeltransportaufträge werden nach 24 Stunden automatisch aus der Auftragshistorie gelöscht.
Übersicht über die Flotte
Die Flottenübersicht bietet einen Überblick über alle Roboter, die mit dem MQTT-Broker verbunden sind. Außerdem werden alle angeschlossenen Roboter zur schnellen Identifizierung in der Kopfzeile neben dem SOTO-Symbol angezeigt.
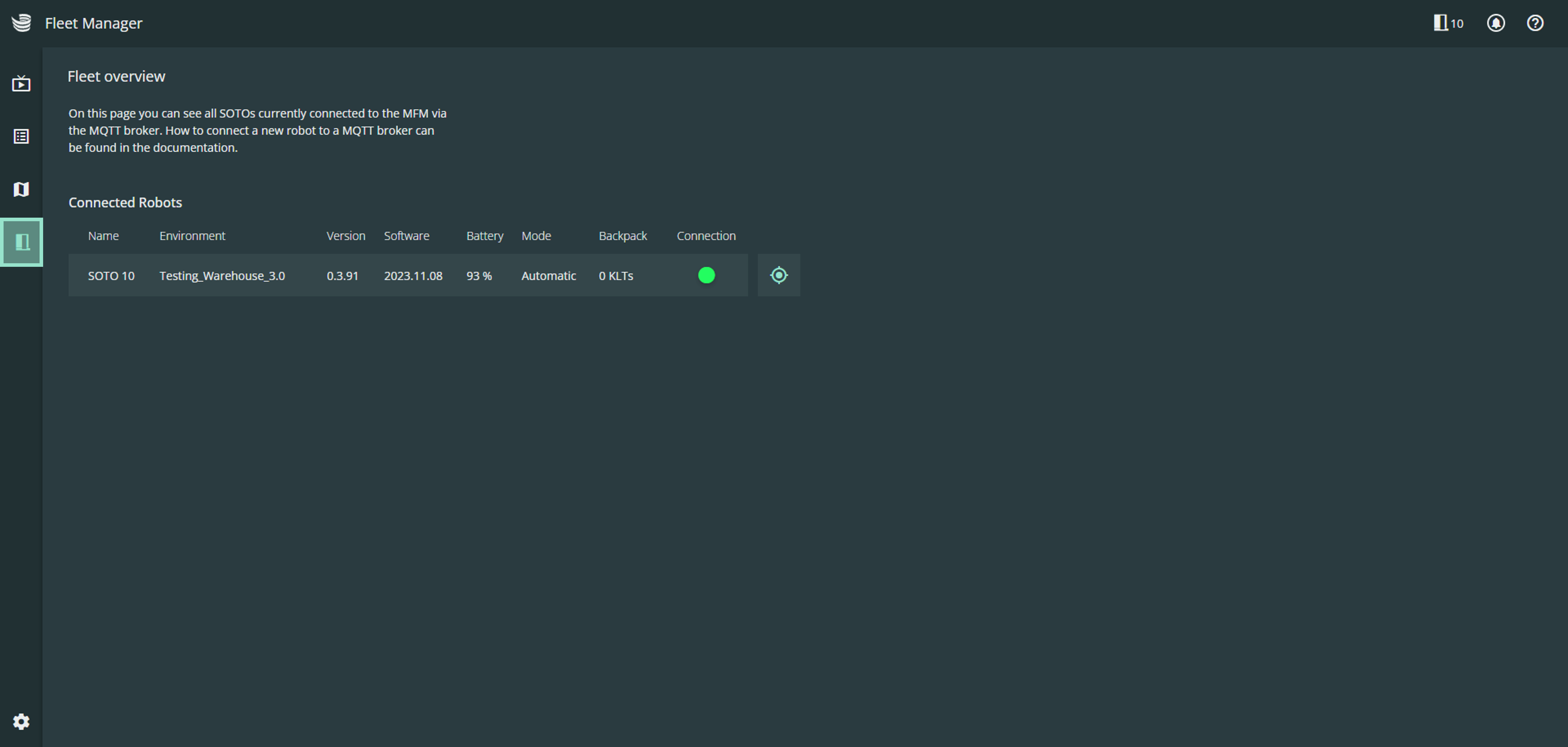
Die folgenden Informationen werden für jeden angeschlossenen Roboter angezeigt:
Der Name des Roboters
Die Umgebung, in der der Roboter aktiv ist
Die Version der aktiven Umgebung
Batteriestatus zur Überprüfung des aktuellen Ladezustands
Die Betriebsart des Roboters ("Automatik", "Mapping" oder "Manuell")
Die Anzahl der Ladungsträger im Backpack des Roboters
Der Verbindungsstatus der Netzwerkverbindung
Die Synchronisierung von SOTO mit der Flottenübersicht kann einige Sekunden dauern.
Modellierung
Im Modellierungsbereich können Sie Umgebungen erstellen und verwalten.
Karten
Alle vom Roboter aufgezeichneten Lokalisierungskarten sind im Kartenbereich zu finden.
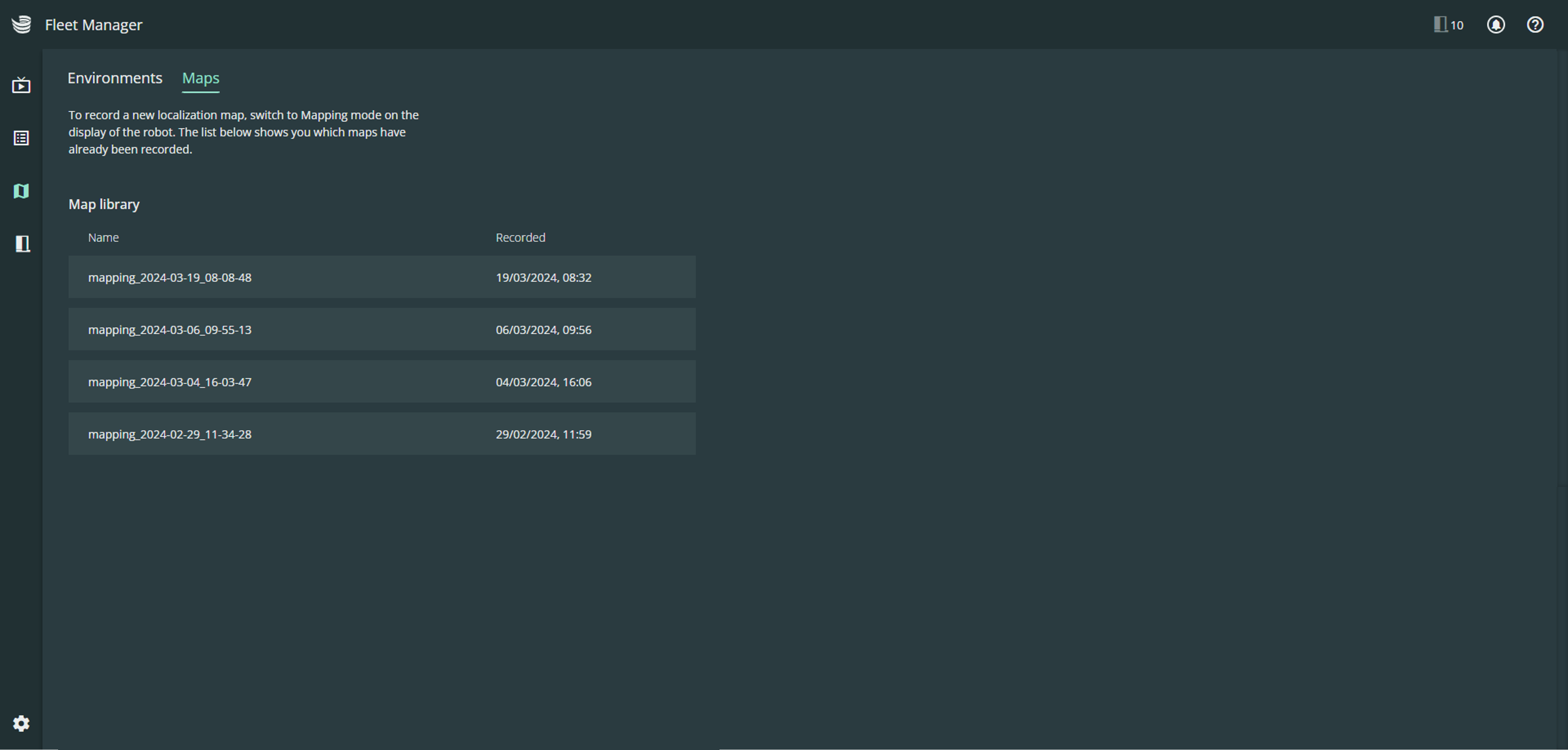
Um eine neue Lokalisierungskarte aufzuzeichnen, wechseln Sie auf dem Display des Roboters in den Mapping-Modus und verwenden Sie den Controller, um den Roboter durch die Umgebung zu navigieren. Die Karte wird automatisch erstellt und in das Magazino Operations Center hochgeladen.
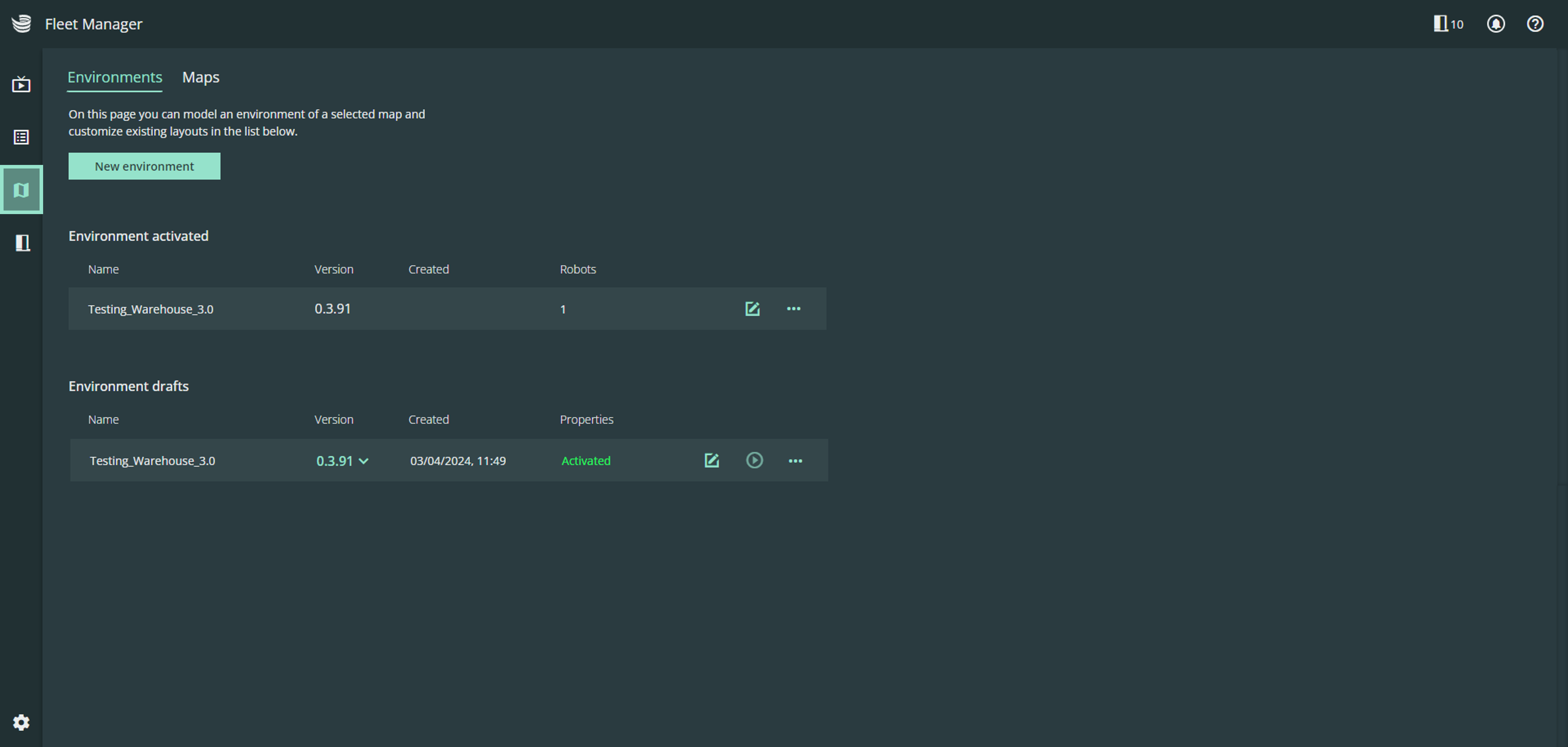
Umgebungen
Eine angereicherte Karte wird als "Umgebung" bezeichnet. Alle SOTOs benötigen ein Umgebungsmodell, um zu funktionieren.
Im Bereich Umgebungen finden Sie eine Übersicht über alle verfügbaren Umgebungen.
Wenn die Umgebung korrekt modelliert ist, kann sie aktiviert und in der SOTO-Flotte verwendet werden.
Umgebungseditor
Mit dem Umgebungseditor können Sie Umgebungen erstellen und anpassen.

Um eine Umgebung zu modellieren, sind alle Abmessungen der Regale und Fächer erforderlich - wie unten gezeigt.
Erstellen einer neuen Umgebung
Um eine neue Umgebung zu erstellen, klicken Sie auf "Neue Umgebung" und vergeben einen Namen für Ihre Umgebung.
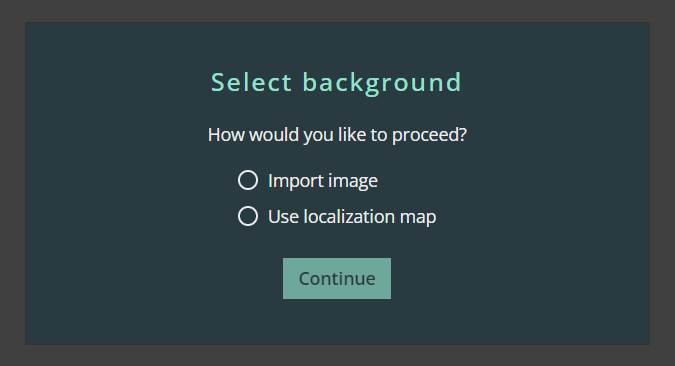
Alle Umgebungen benötigen ein Hintergrundbild. Das Hintergrundbild ist entweder:
Bild (PNG-Bild des Grundrisses)
Lokalisierungskarte (vom Roboter aufgezeichnet)
Wenn Sie einen Grundriss des Arbeitsbereichs haben, können Sie diesen maßstabsgetreu hochladen. Es wird jedoch dringend empfohlen, eine Lokalisierungskarte zu verwenden, da diese mit der vom Roboter wahrgenommenen Umgebung übereinstimmt.
Wählen Sie die richtige Lokalisierungskarte, die Sie mit dem Roboter aufgenommen haben, aus der Liste der Karten aus.
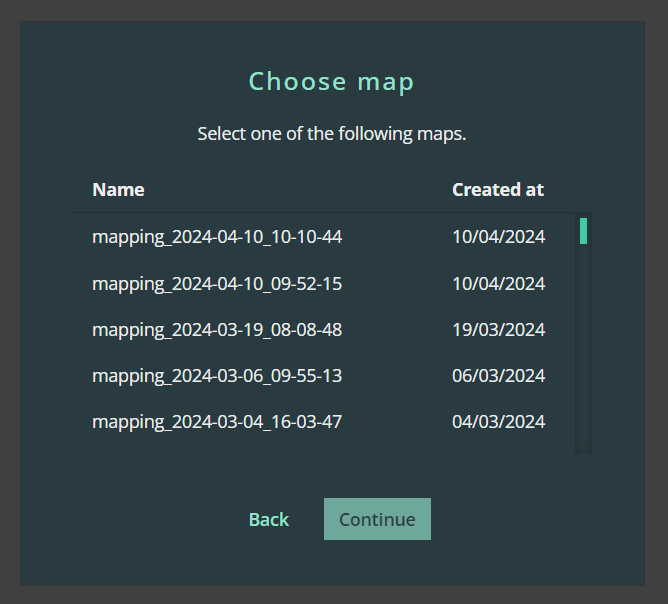
Wenn Sie Ihre Lokalisierungskarte zu einem späteren Zeitpunkt aktualisieren möchten, kann die Karte jederzeit durch eine aktualisierte Version ersetzt werden.
Die neue Umgebung wird automatisch im Umgebungseditor geöffnet. Sie können die Karte nach Belieben im Layout positionieren.
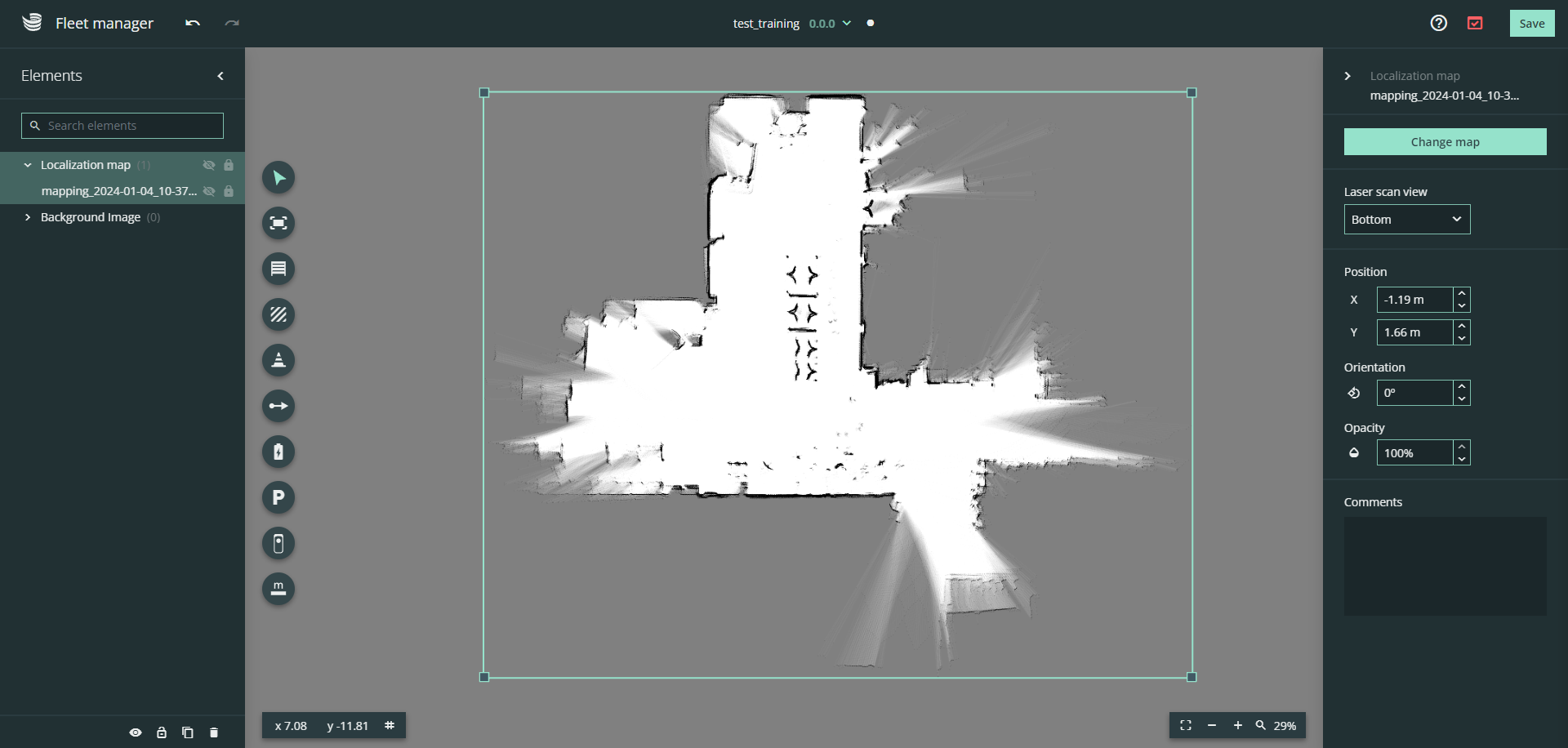
Sie können auch die Position und Ausrichtung der Karte im rechten Bereich anpassen.
Bearbeiten einer bestehenden Umgebung
Wählen Sie die Umgebung aus, die Sie bearbeiten möchten, und klicken Sie auf das Bleistiftsymbol.
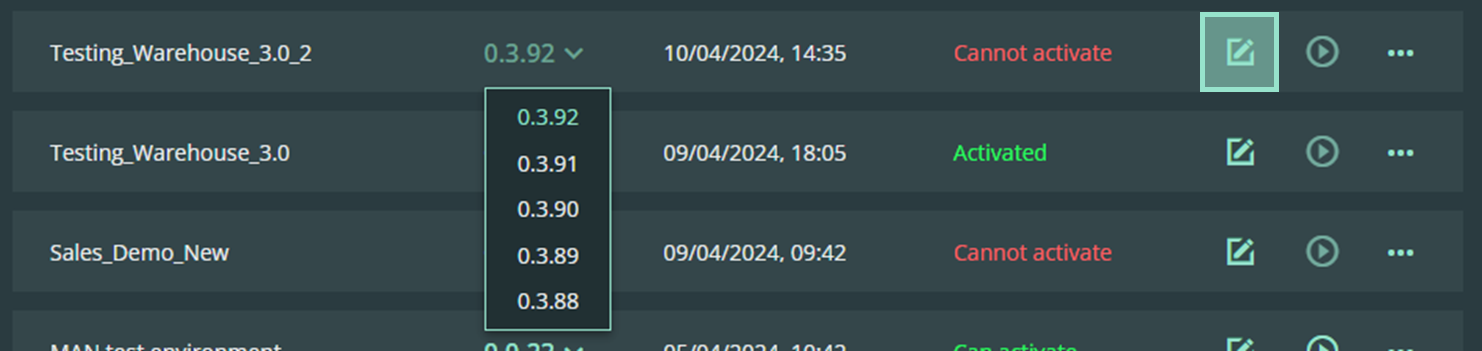
Sie können auch ältere Versionen der gleichen Umgebung bearbeiten, indem Sie die Versionsdatei aus dem Dropdown-Menü auswählen.
Symbolleiste

Der Umgebungseditor bietet eine Reihe von Werkzeugen zur Bearbeitung der Karte.
Die Werkzeuge können in der linken Werkzeugleiste ausgewählt werden. Das ausgewählte Werkzeug wird in grüner Farbe angezeigt.
Auswahlwerkzeug
 | Mit dem Auswahlwerkzeug können Sie einzelne Elemente auf der Karte auswählen und verschieben. Bewegen Sie den Mauszeiger über das Cursor-Symbol und wählen Sie das "Knotenauswahlwerkzeug", d.h. den Cursor mit dem Punkt darunter. |
Wählen Sie Knoten, Verbindungen oder Objekte aus, um sie neu zu positionieren, oder verwenden Sie das Seitenpanel für gezielte Bearbeitungen.
Arbeitsbereich
 | Der Arbeitsbereich zeigt den Bereich auf der Karte, in dem sich SOTO bewegen darf. |
Der Arbeitsbereich legt die Grenzen fest, in denen sich die Roboter bewegen und Aufgaben ausführen dürfen. Dieser Bereich wird als Polygon erstellt.
Halten Sie die "Shift"-Taste gedrückt, um den Arbeitsbereich auf 90°-Ecken zu fixieren.
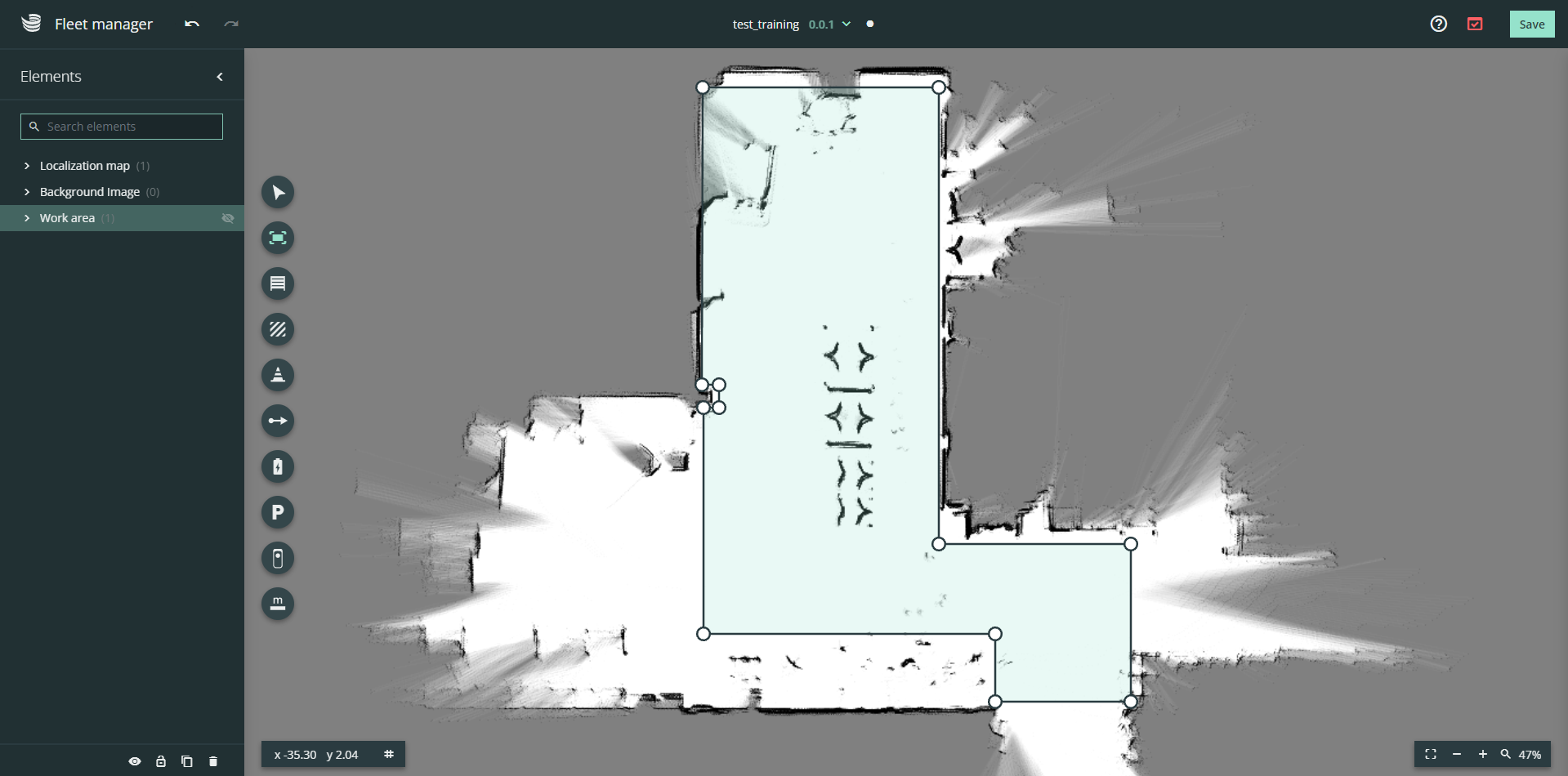
Um den Arbeitsbereich anzupassen, wählen Sie das Werkzeug Arbeitsbereich und ziehen Sie die Knoten in die gewünschte Position. Um Knoten hinzuzufügen, klicken Sie auf eine der Verbindungslinien.
Der Arbeitsbereich ist für eine erfolgreiche Validierung der Umgebung erforderlich.
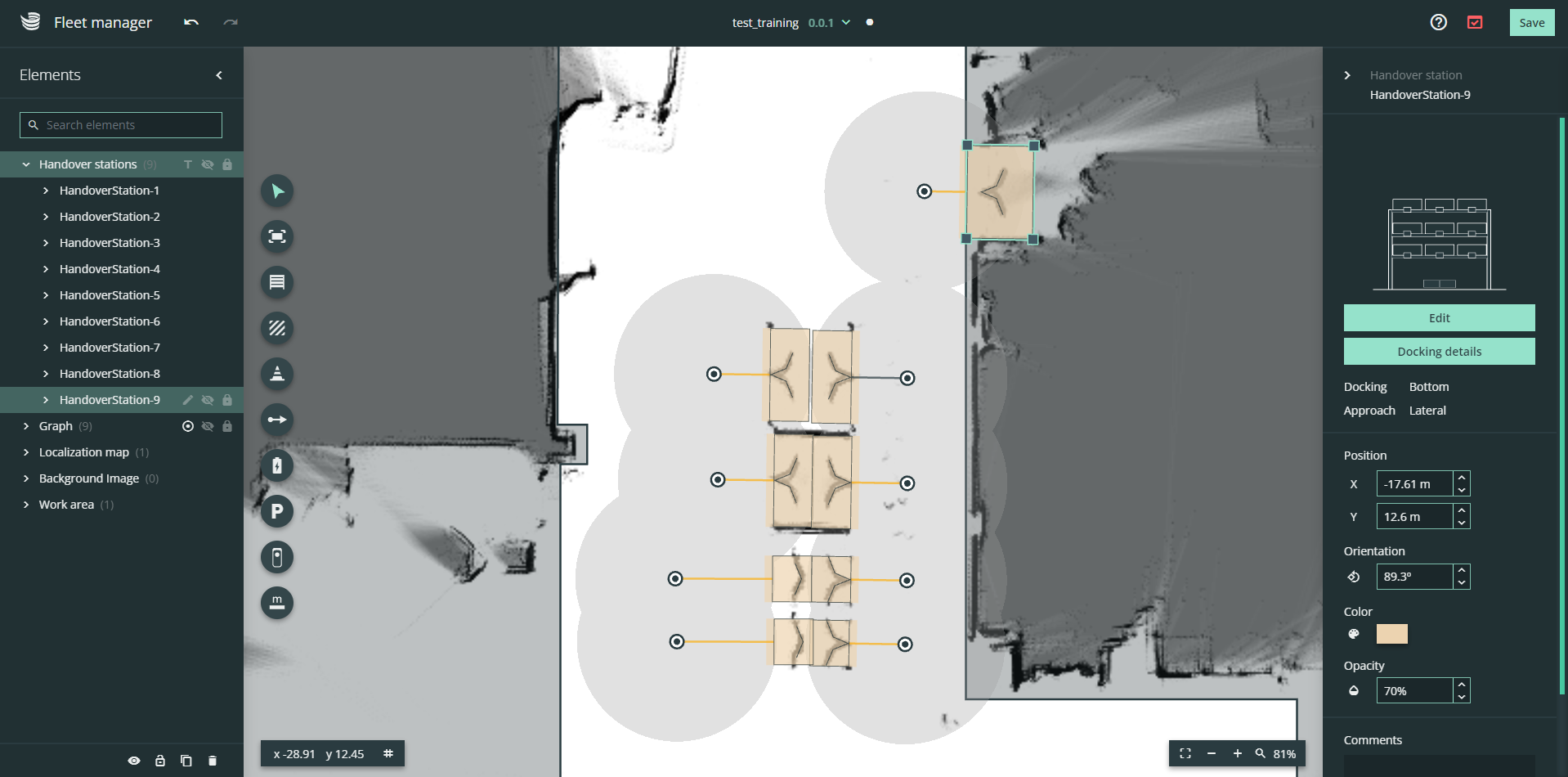
Übergabestationen
 | Die Übergabestationen werden auf der Karte eingezeichnet, um SOTO zu zeigen, wo sich die Übergabestationen in der realen Arbeitsumgebung befinden. |
Das Werkzeug Übergabestation öffnet den Editor für Übergabestationen. Verwenden Sie den Editor für Übergabestationen, um ein Modell Ihres Regals zu erstellen.
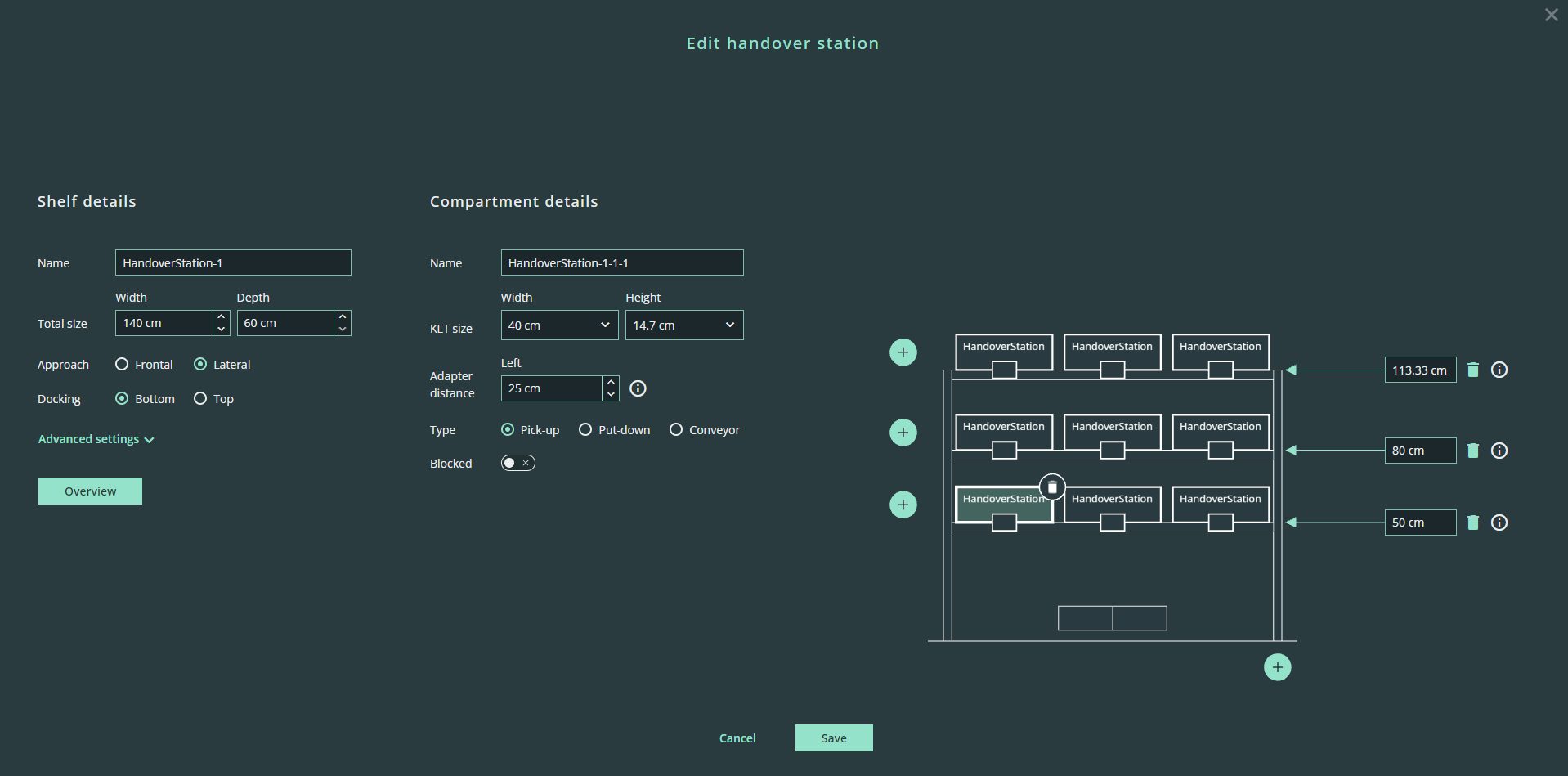
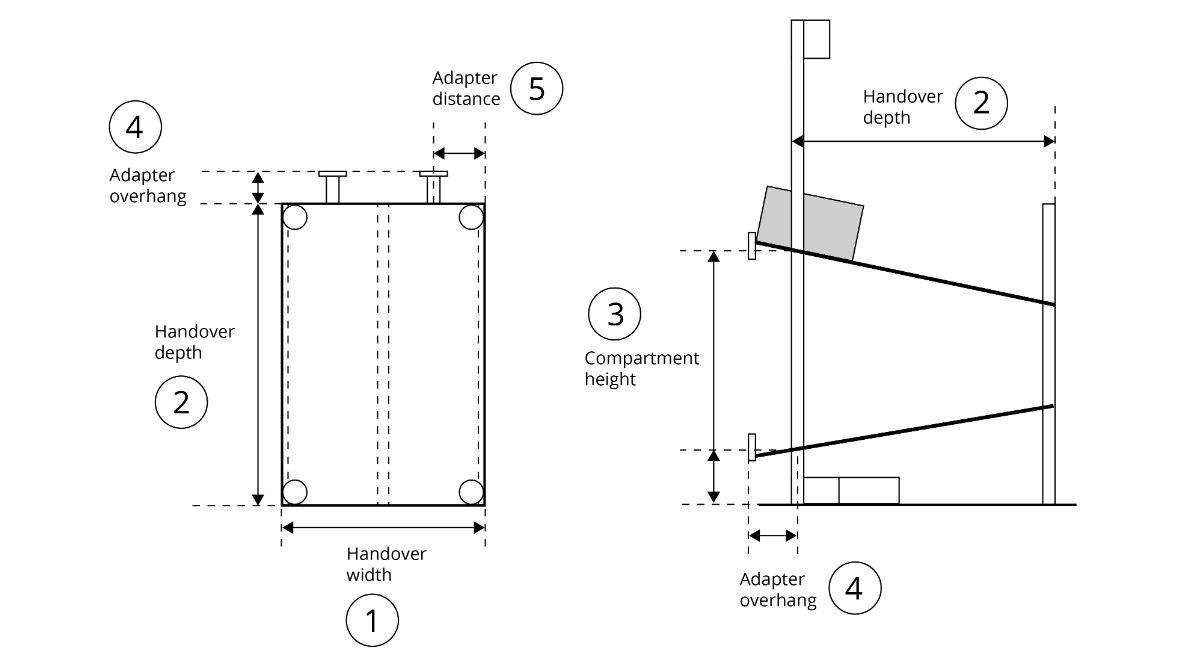
Details zu Übergabestationen
Name: Freier Text
Gesamtgröße: Breite
(Docking-) Anfahrt: Frontal oder lateral
Docking (Position des Dockingshapes): Oben oder unten
Zusatzeinstellungen:
Typ: Statisch, einstellbar
Adapterüberhang
Versatz des Dockingshapes: x, y
Regalfachdetails
Wählen Sie die einzelnen Fächer in der Grafik aus und geben Sie die Maße für jedes Fach ein.
Name: freier Text, wie im QR-Code des Fachadapters angegeben
Größe: Breite
Abstand des Adapters: Abstand von der linken Regalkante zur Mitte des Fachs in cm
Typ: Aufnehmen, Ablegen, Förderband
Blockiert: vorübergehende Blockierung eines einzelnen Fachs
Visualisierung
Höhe der Fachreihe: Höhe vom Boden bis zur Oberkante der Fachbodenreihe in cm.
Fach hinzufügen: "Plus"-Symbol auf der linken Seite einer Zeile
Spalte hinzufügen: "Plus"-Symbol am unteren Rand der Visualisierung
Fächer löschen: Symbol "Mülleimer" in der oberen rechten Ecke des Fachs
Reihen löschen: Symbol "Mülleimer" neben dem Eingabefeld für die Höhe der Reihe
Um die Übergabestation zu modellieren, messen Sie die Abmessungen Ihres Regals.
Sobald Sie die Details des Regals gespeichert haben, wird ein Modell des Regals erstellt und automatisch in der Umgebung platziert. Positionieren Sie das Regal so, dass es sich mit der Andockform auf der Karte deckt.
Die Position der Übergabestation darf um nicht mehr als 20 cm von der virtuellen Position auf der Karte abweichen.
Modellieren Sie alle Regale und Übergabestationen und platzieren Sie sie in der Umgebung.
Wenn Sie identische Regale haben, können Sie die Regale mit Strg+C → Strg+V kopieren, um zu vermeiden, dass Sie identische Abmessungen mehrfach eingeben müssen.
Bereiche
 | Die Zonen sind konfigurierbare Bereiche, in denen bestimmte Fahrgeschwindigkeiten vorgeschrieben werden können. |
Richten Sie Zonen im Arbeitsbereich ein und legen Sie Geschwindigkeitsbegrenzungen fest.
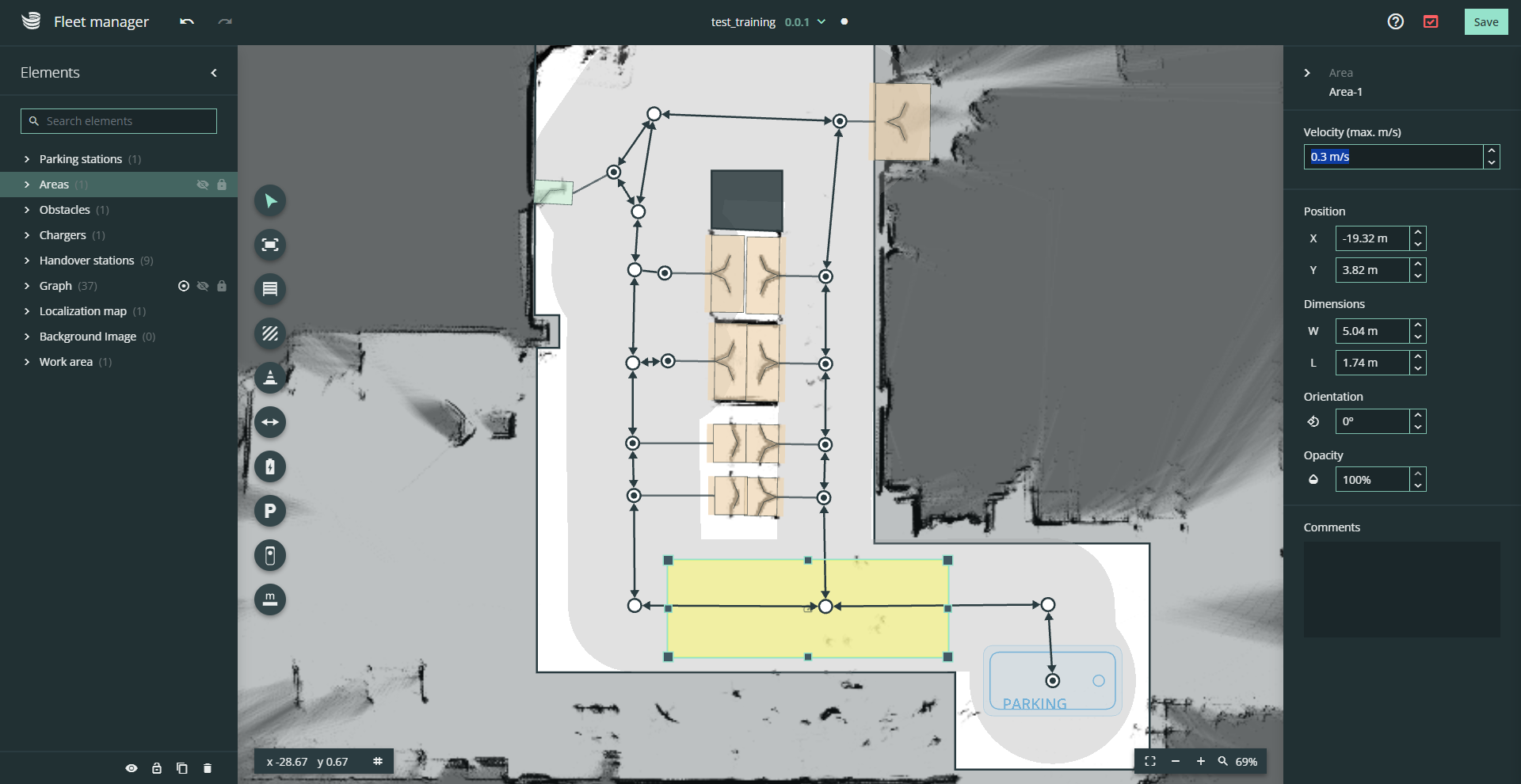
SOTO passt seine Fahrgeschwindigkeit entsprechend an, wenn seine Grundfläche eine Zone überschreitet.
Hindernisse
 | Die Hindernisse werden auf der Karte eingezeichnet, um Bereiche festzulegen, in denen SOTO nicht fahren darf. |
Sie können Hindernisse erstellen, um dauerhafte Hindernisse oder zu vermeidende Bereiche innerhalb des Arbeitsbereichs zu modellieren. Hindernisse werden als Polygone erstellt.

Graph-Tool
 | Das Graph-Werkzeug wird zum Zeichnen des Fahrgraphen für SOTO verwendet. Bewegen Sie den Mauszeiger über das Pfeilsymbol und wählen Sie das Werkzeug Zwei-Wege-Diagramm. |
Erstellen Sie den Fahrgraphen, indem Sie ein Netz aus Knoten und Verbindungen in der Umgebung platzieren. Verbinden Sie die Knotenpunkte aller Übergabestationen, Ladestationen und Parkzonen mit dem Fahrgraphen.
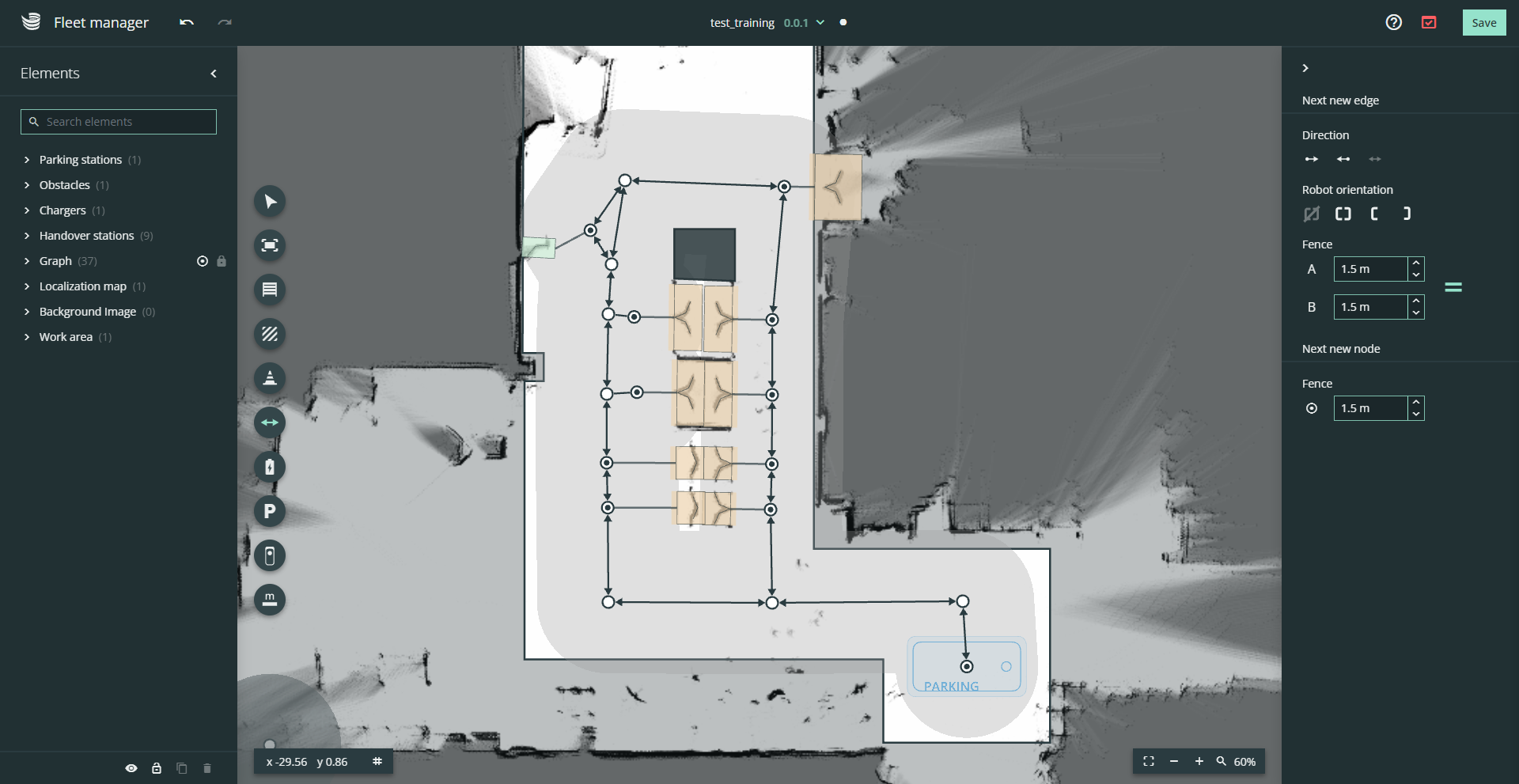
Jede Verbindung kann entweder als Einbahnstraße oder als Zweiwegeverbindung ausgewählt werden.
Der Fahrgraph muss die folgenden Eigenschaften aufweisen:
Kein Graph mit offenen Enden
Befahrbare Wege zwischen allen Übergabestationen, Parkzonen und Ladestationen
Drücken Sie ESC, um die Auswahl des aktuellen Graphenabschnitts aufzuheben und an einem anderen Knoten fortzufahren.
Allen Knoten und Verbindungen wird eine Zaun-Eigenschaft zugewiesen. Der Zaun stellt den Bereich um den Knoten oder die Verbindung dar, in dem der Roboter vom Fahrgraphen abweichen darf. Dies wird zur Wegoptimierung und Hindernisvermeidung genutzt.
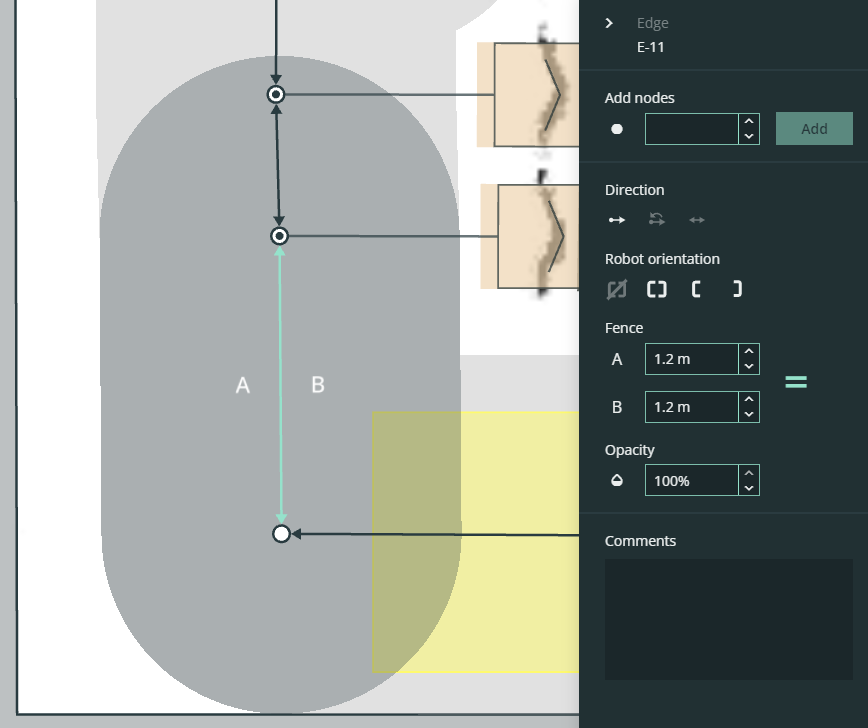
Die Grenzen des Zauns können auf jeder Seite größer oder kleiner gemacht werden. Dadurch wird der Navigationspfad des Roboters um Hindernisse herum bestimmt, wobei entweder links oder rechts bevorzugt wird.
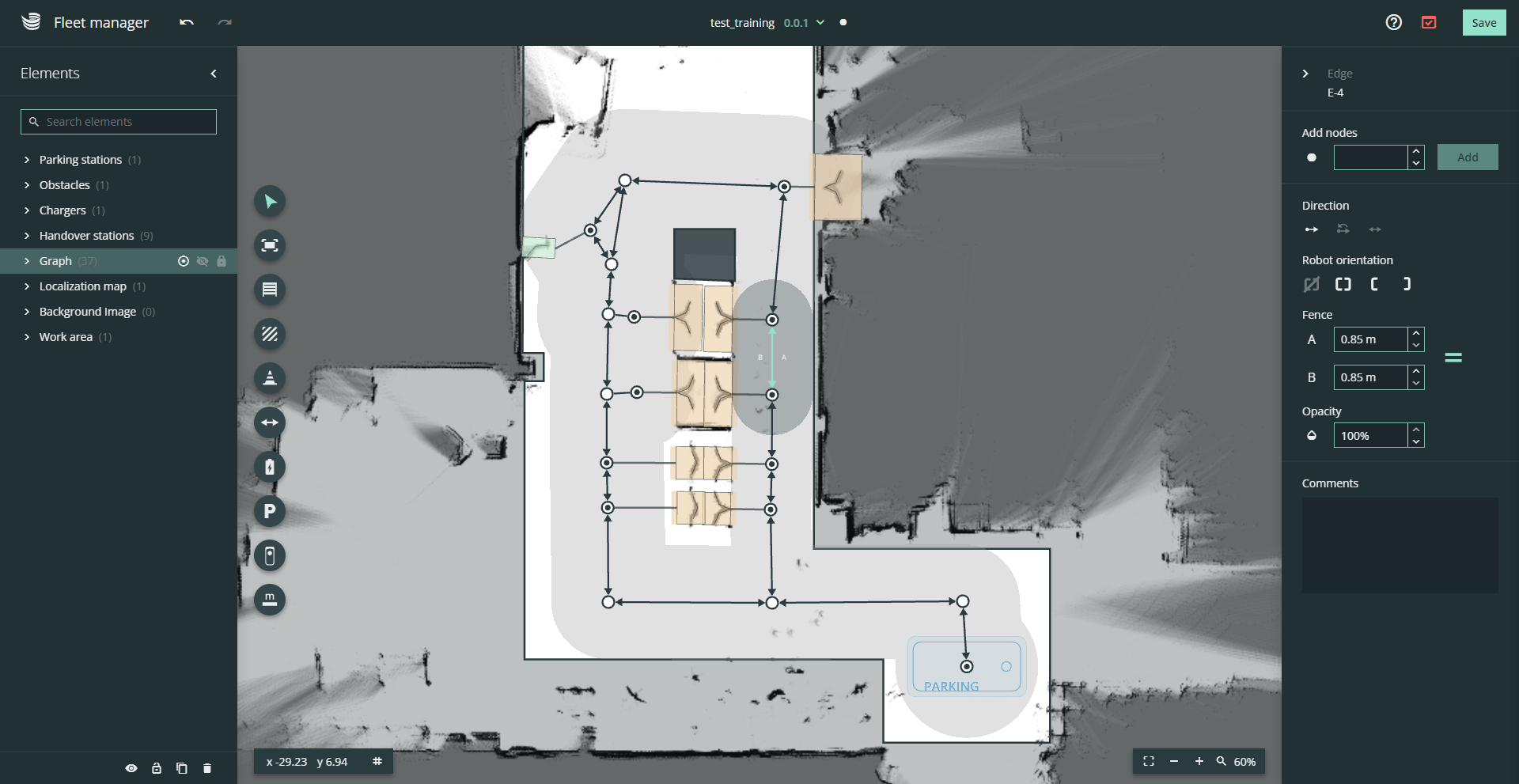
Achten Sie darauf, die Zaungrenzen auf den tatsächlich verfügbaren Platz zu reduzieren, um die Bahnplanungsleistung des Roboters zu verbessern. Mit einer korrekten Modellierung wird SOTO seinen Weg bestmöglich planen und weniger Bahnkorrekturen benötigen.
Achten Sie bei der Definition der Zaungrenzen für Knoten und Verbindungen auf mögliche Wendepunkte.
Ladestationen
 | Die Ladestationen müssen auf der Karte platziert werden, um SOTO zu zeigen, wo sich die Ladestationen in der realen Arbeitsumgebung befinden. |
Sie können die Ladestationen positionieren, indem Sie das virtuelle Modell mit dem 135°-Winkel des Ladestationskörpers überlappen.
Die Ladestation muss mit einem Knoten des Fahrgraphen verbunden sein. Die siebenstellige Seriennummer jeder Ladestation muss für eine Plausibilitätsprüfung bei der Relokalisierung eingegeben werden. Diese finden Sie auf dem Typenschild der Ladestation.
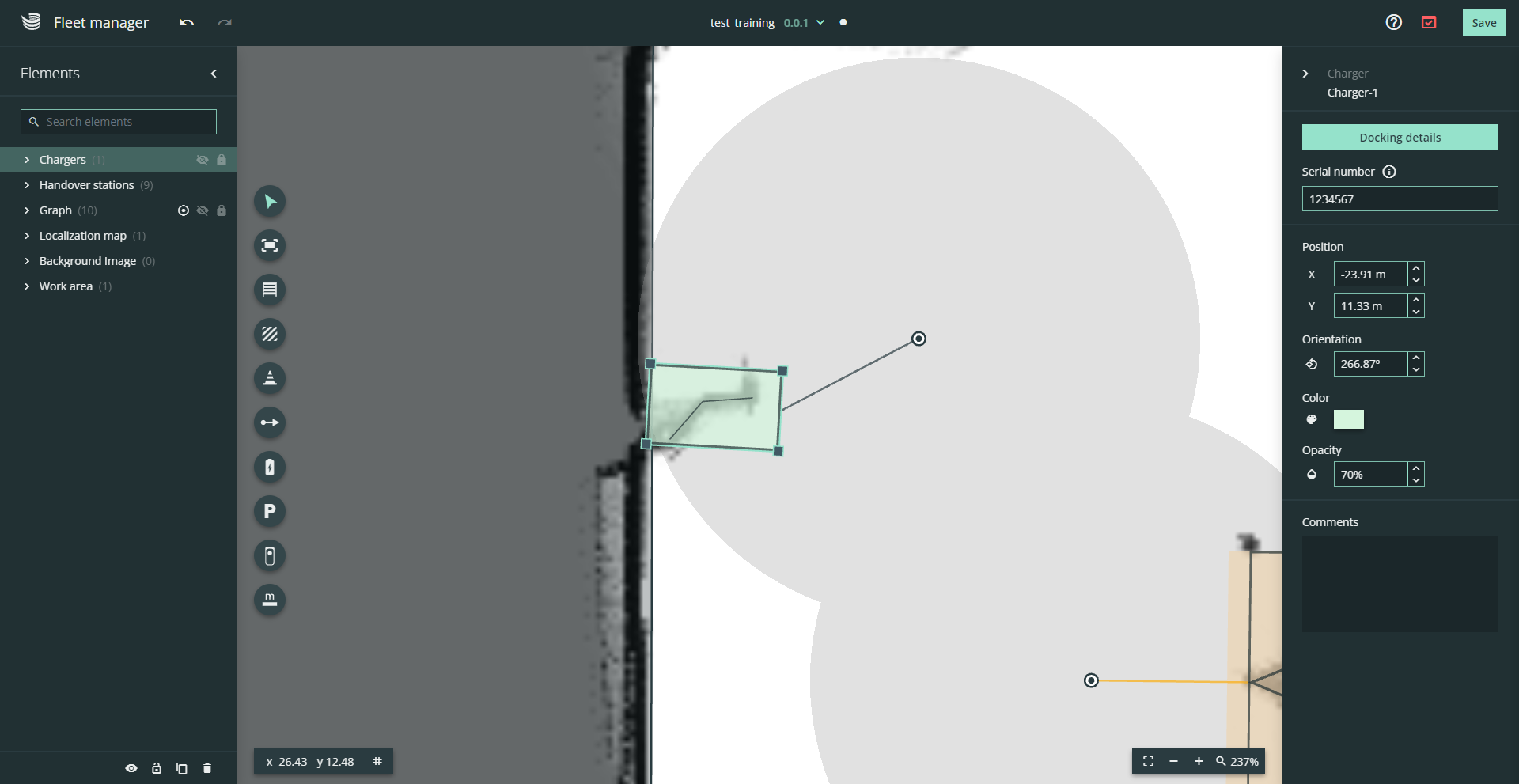
Die Position der Ladestation darf um nicht mehr als 20 cm von der virtuellen Position auf der Karte abweichen.
Für eine erfolgreiche Validierung der Umgebung ist mindestens eine Ladestation erforderlich.
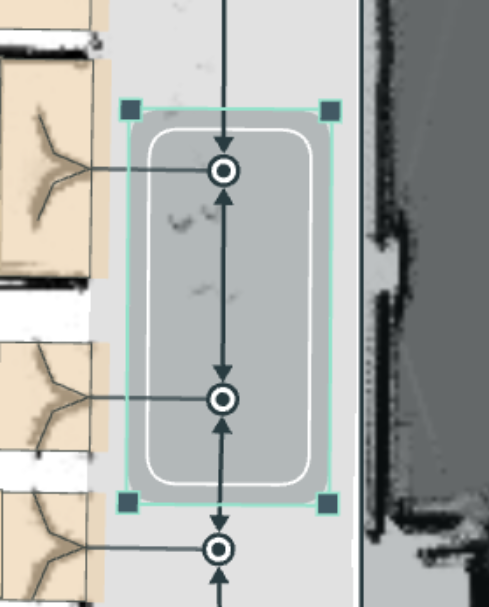
Parkzonen
 | Die Parkzonen werden auf der Karte eingezeichnet, um dem Roboter zu zeigen, wo er stehen darf, wenn es keine Aufgaben gibt. |
Fügen Sie dem Layout Parkzonen hinzu und verbinden Sie diese mit dem Fahrgraph.
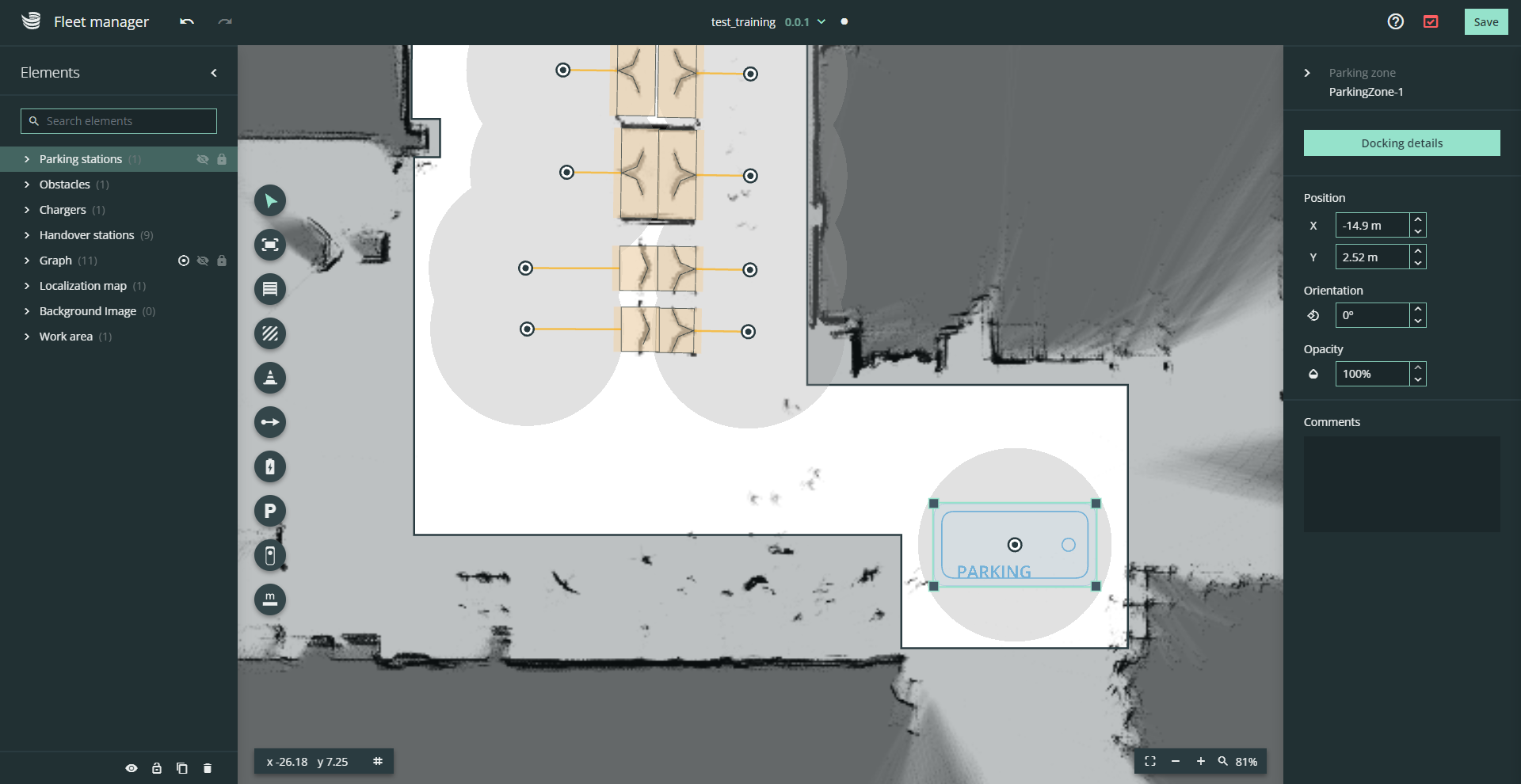
SOTO wartet an den Parkzonen, wenn kein aktiver Transportauftrag vorliegt. Bei einem Feueralarm kehrt SOTO außerdem automatisch in die nächstgelegene Parkzone zurück.
Für eine erfolgreiche Umweltvalidierung ist mindestens eine Parkzone erforderlich.
SOTO Modell
 | Das SOTO Modell dient als Werkzeug zum Testen von Bereichen mit einem skalierten SOTO Modell. |
Platzieren und verschieben Sie das SOTO-Modell entlang des Fahrgraphen des Layouts.
Der Zweck ist die Überprüfung des SOTO-Platzbedarfs im Layout.
Messwerkzeug
 | Sie können das Messwerkzeug verwenden, um den Abstand zwischen zwei Objekten zu bestimmen. Wählen Sie das Messwerkzeug aus und klicken Sie dann auf einen Punkt und erneut auf einen zweiten Punkt, um die Entfernung zu messen. Deaktivieren Sie es, indem Sie ein anderes Werkzeug auswählen. |
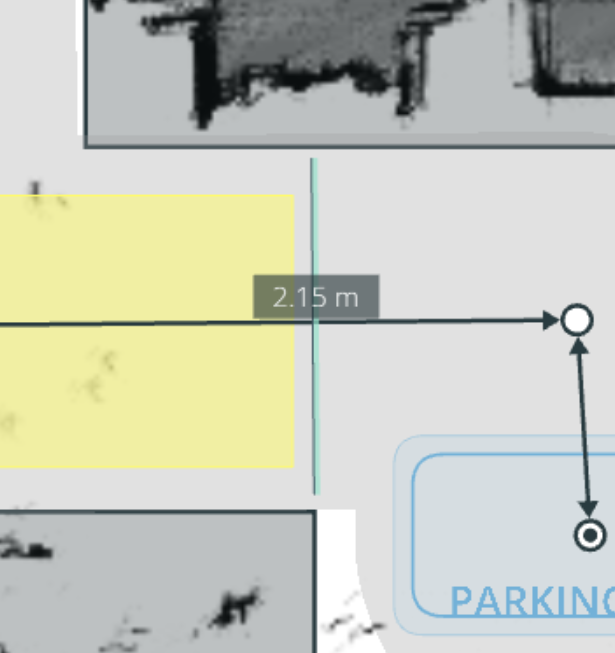
Zeichnen Sie Messlinien in das Layout, um die Länge zu ermitteln.
Speichern und Aktivierung einer aktualisierten Umgebung
Sobald die Modellierung abgeschlossen ist, kann die Umgebung validiert, gespeichert und in SOTO bereitgestellt werden.
Validierung
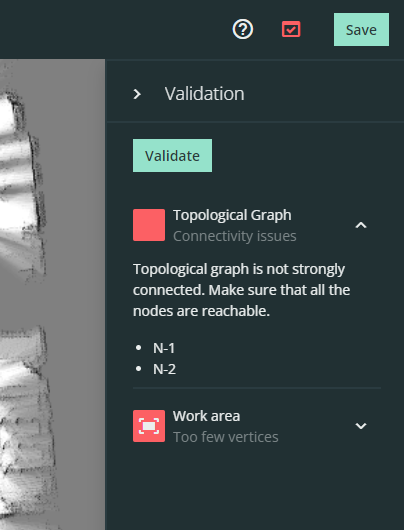
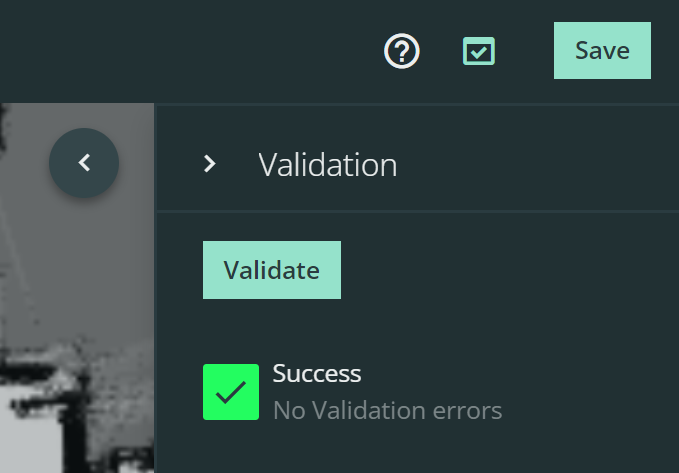
Es können nur Umgebungen auf SOTO bereitgestellt werden, die erfolgreich validiert worden sind. Das Validierungsmenü und die Fehlerübersicht befinden sich neben der Schaltfläche "Speichern".
Jeder Validierungsfehler wird im Validierungsmenü angezeigt. Versuchen Sie, das Problem zu beheben, und starten Sie die Validierung erneut, um das aktualisierte Ergebnis zu sehen.
Sie können eine nicht validierte Umgebung zwar speichern, aber nicht aktivieren.
Versionierung
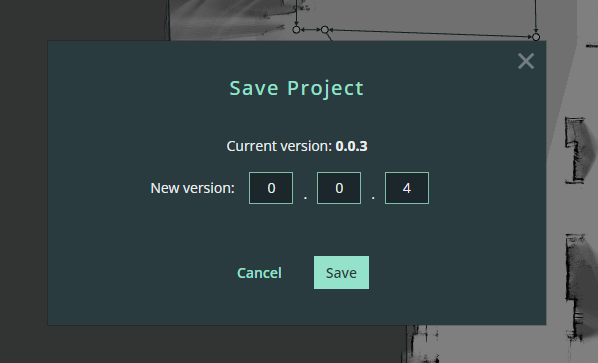
Speichern Sie eine neue Version Ihrer Umgebung.
Es ist nicht möglich, eine alte Version einer Umgebung zu überschreiben. Jedes Inkrement muss als neue Version gespeichert werden.
Bereitstellung und Aktivierung
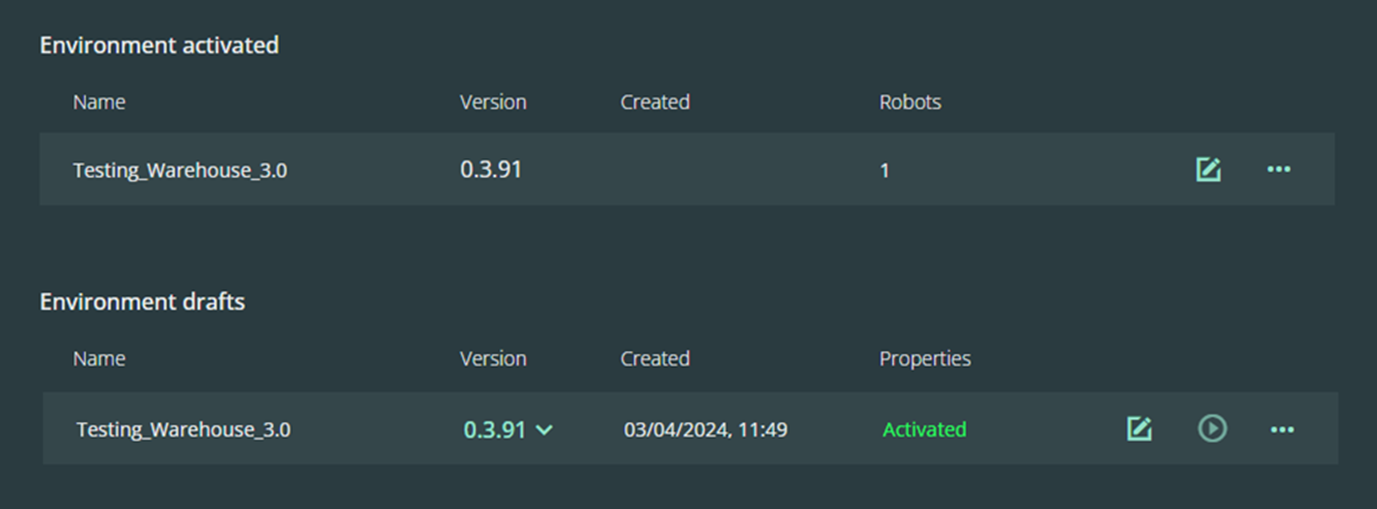
Sobald die Umgebung gespeichert wurde, wird sie in der Umgebungsübersicht angezeigt.

Wählen Sie die richtige Version Ihrer Umgebung und aktivieren Sie sie durch Drücken der Play-Taste.
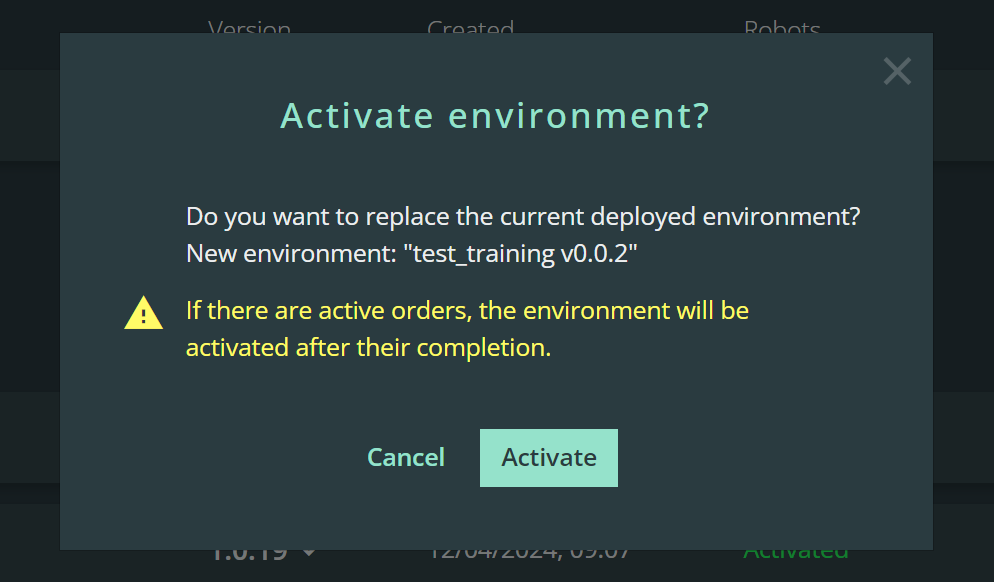
Wenn eine neue Umgebung aktiviert wird, werden alle derzeit aktiven Aufträge abgeschlossen, bevor die neue Umgebung aktiviert wird.
Falls SOTO in der neuen Umgebung delokalisiert wird, muss der Roboter manuell zu einer Ladestation gefahren werden, bevor der automatische Betrieb wieder aufgenommen werden kann.