EUT03 - Mastercontroller
Einführung in Master Controller Systeme
SOTO benötigt eine Vielzahl von Informationen, um einen Sammeltransportauftrag erfolgreich auszuführen. Zum Beispiel:
Quelle (Fach)
Senke (Fach)
Informationen zum Ladungsträger
Pfad
Blockaden durch andere Fahrzeuge
Feueralarm
Ladezustand
Verfügbare Ladegeräte
Status von Peripheriegeräten (z.B. Türen)
…

SOTO stellt diese Informationen nicht selbst zusammen. Stattdessen ist dies die Hauptaufgabe eines Master Controllers.
Der Master Controller ist dafür verantwortlich, alle relevanten Informationen zu sammeln, die nächsten Schritte zu bestimmen und die daraus resultierenden Befehle an den Roboter weiterzuleiten.
Einführung in VDA5050
SOTO wird über VDA5050-Befehle gesteuert. VDA5050 ist eine herstellerunabhängige Schnittstelle zur Steuerung autonomer mobiler Roboter und Fahrzeuge.

Der Standard VDA5050 wird vomVerband der Automobilindustrie zusammen mit dem Verband der Maschinenbauindustrie mit dem Ziel veröffentlicht, eine einzige, herstellerunabhängige Plug-and-Play-Schnittstelle zwischen Master Controllern und autonomen mobilen Robotern zu schaffen.
Der VDA5050 Standard bietet allen kompatiblen Robotern und Master Controllern ein definiertes Format für den Austausch von Aufträgen und Statusdaten.
Einfach ausgedrückt, besteht die Hauptkommunikation zwischen dem Master Controller und dem Roboter aus einer ständig aktualisierten Liste von Befehlen. Die Befehlsliste enthält Knotenpunkte und Verbindungen, auf denen sich der Roboter bewegen darf und die Aktionen, die an diesen Positionen ausgeführt werden sollen.
Knoten und Verbindungen
Knoten und Verbindungen bilden den sogenannten Fahrgraphen. Knoten sind Wegpunkte, die über Verbindungen miteinander verbunden sind.
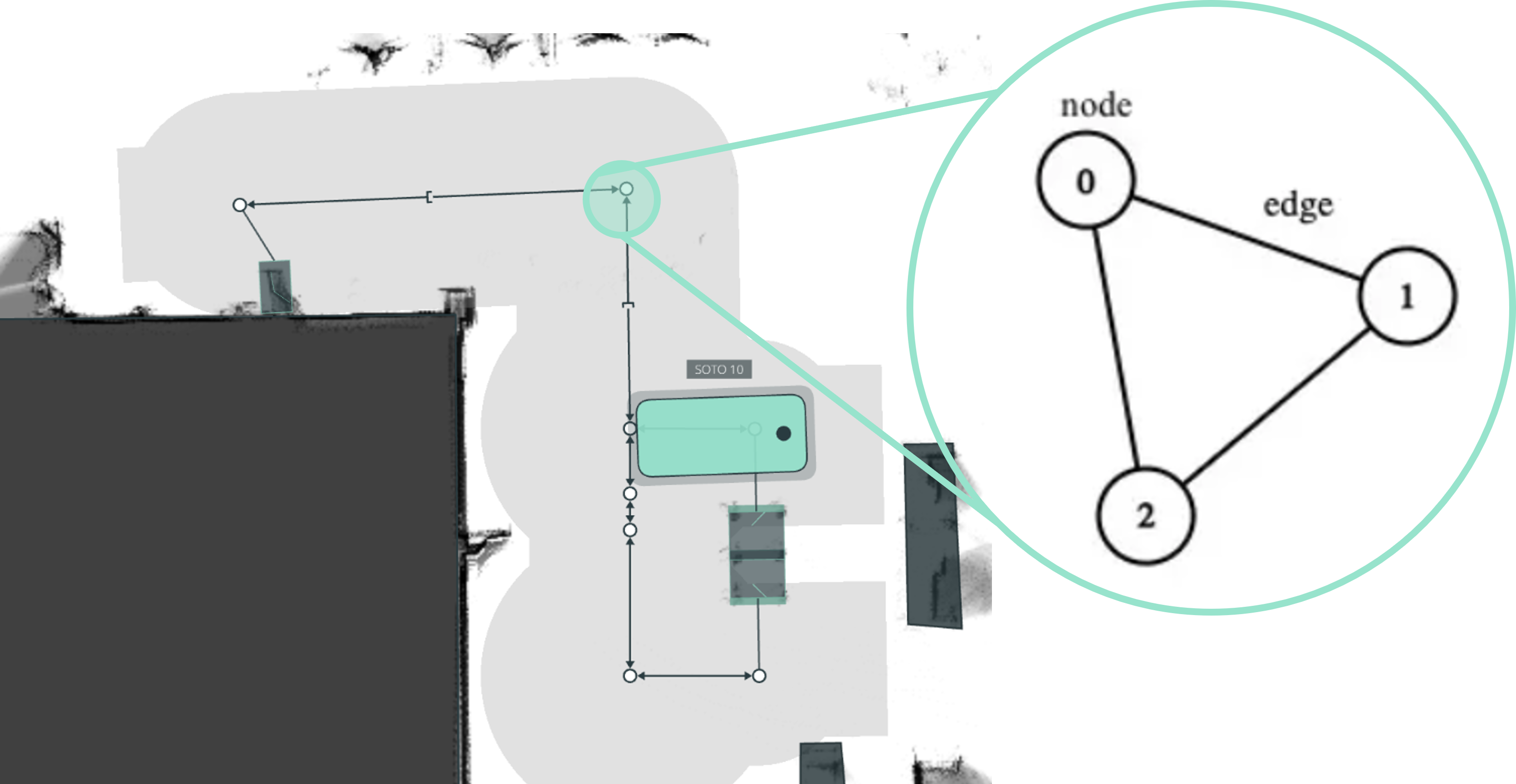
Der Fahrgraph ist ein editierbares Overlay zum 2D-Umgebungsmodell im Magazino Operations Center. Das Fahrgraph definiert die Navigationswege für SOTO.
Der Master Controller muss den Fahrgraphen und das Umgebungsmodell der von ihm gesteuerten Fahrzeuge kennen. Der Master Controller sendet VDA5050 Befehle an die Roboterflotte. VDA5050-Befehle bestehen im Wesentlichen aus einer Liste von freigegebenen Knoten (Knoten, die für die Fahrt zugelassen sind) und Verbindungen, denen Aktionen zugeordnet sind.
Um eine dynamische Planung zu ermöglichen, wird nicht die gesamte Route eines Sammeltransportauftrags auf einmal übermittelt. Stattdessen werden nur die nächsten Schritte kommuniziert und ständig aktualisiert. Daher wird die Route in "Basis"- und "Horizont"-Komponenten unterteilt:
Basiskomponenten sind freigegebene Knoten und Verbindungen, die zum Überfahren freigegeben sind. Diese Knotenpunkte sind für alle anderen Fahrzeuge gesperrt.
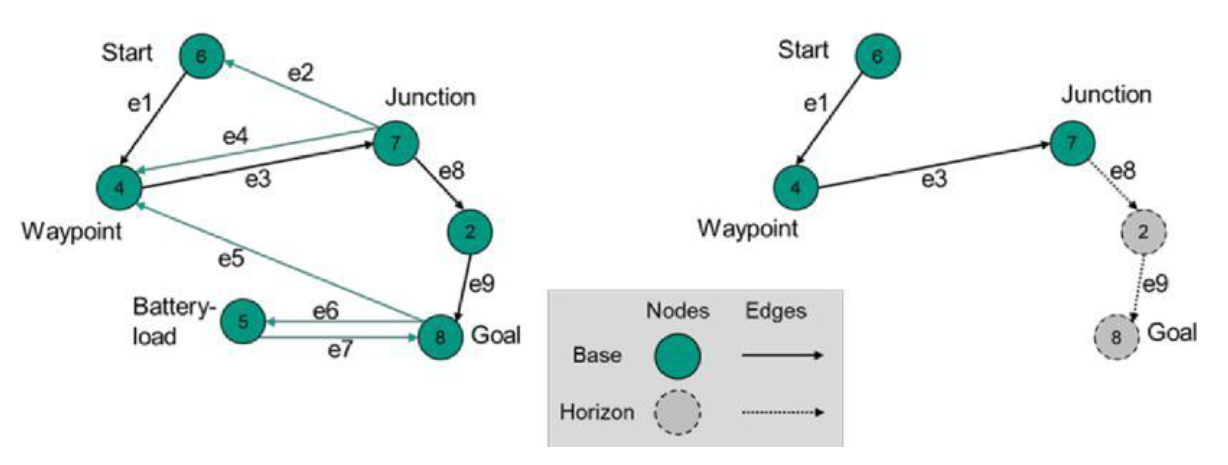
Quelle: VDA/VDMA - VDA5050
Horizontkomponenten, bestehend aus Knoten und Verbindungen, sind die Pfade, die ein Roboter nach Erreichen seiner aktuellen Basiskomponente durchfahren will. Diese Komponenten sind nicht ausschließlich für ein bestimmtes Fahrzeug reserviert, sondern können auch von anderen Fahrzeugen befahren werden. Folglich bleibt die Konfiguration dieser Knotenpunkte flexibel und kann sich als Reaktion auf die Aktivitäten in einer dynamischen Produktionshalle ändern.
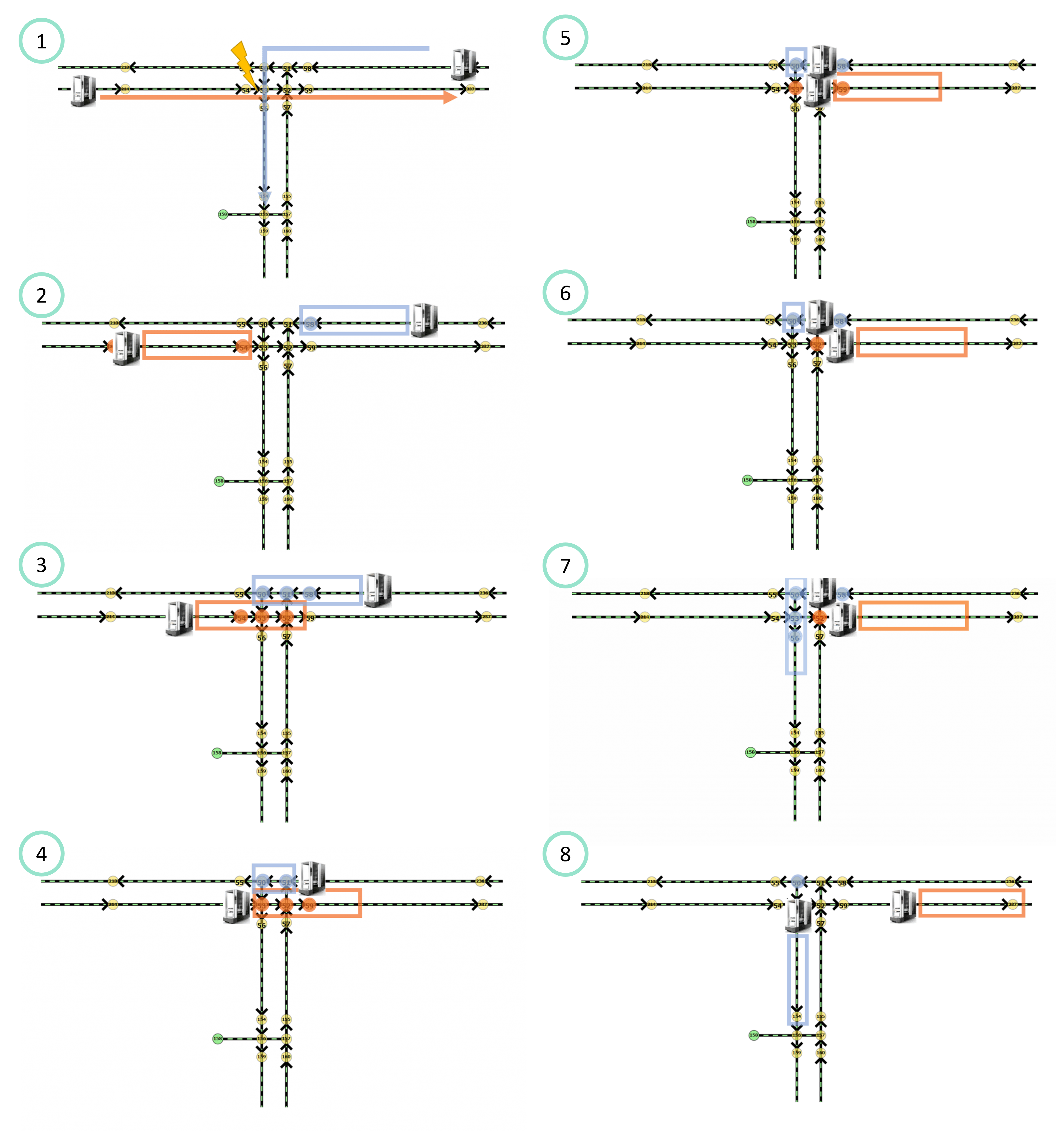
Durch ständiges Aktualisieren der Liste der Basis- und Horizontkomponenten erreicht das Fahrzeug schließlich seine Zielposition. Wenn der Roboter seine aktuellen Basiskomponenten abgearbeitet hat und keine neuen Horizontkomponenten erhält, bleibt er stehen und wartet.
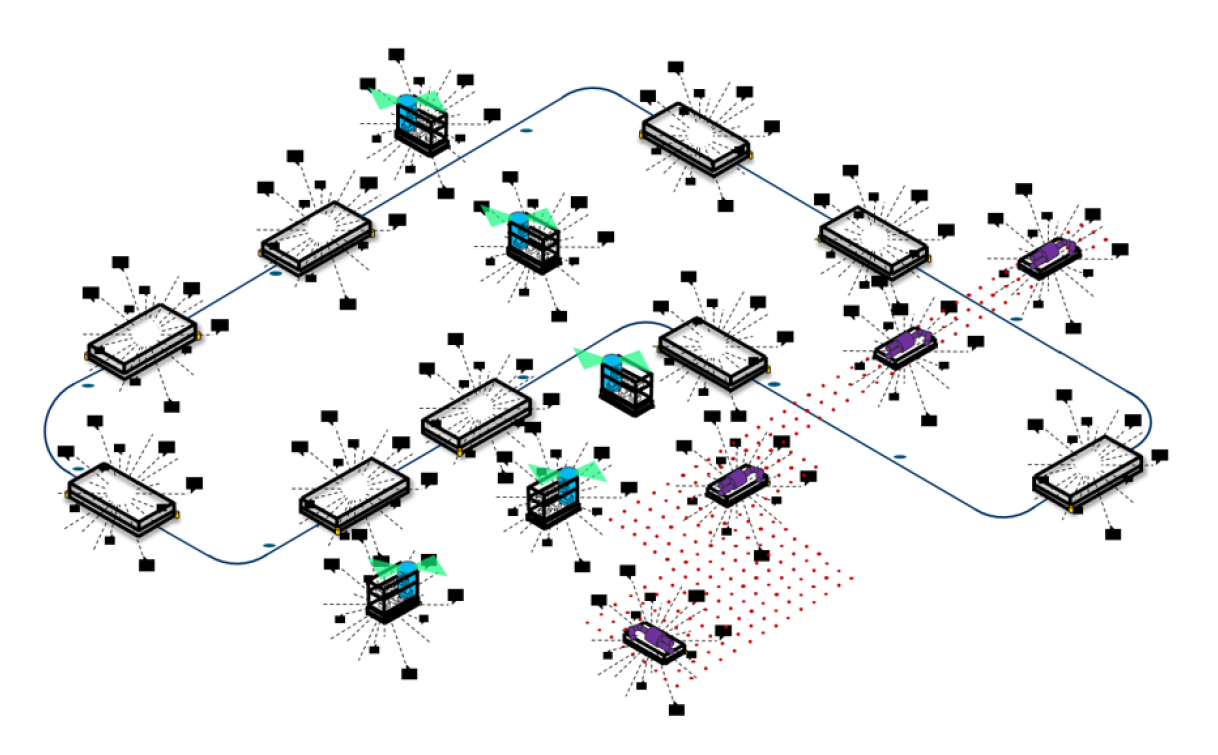
Dieses Verhalten wird zur Steuerung des Verkehrs in einem Multi-Roboter-Koordinationsszenario verwendet:
Quelle: Flexus
Wenn ein Knoten durch ein anderes Fahrzeug blockiert wird, gibt der Master Controller den Knoten nicht frei. Das Fahrzeug hält also auf dem letzten verfügbaren Knotenpunkt an und wartet darauf, dass der nächste Knotenpunkt freigegeben wird, sobald das andere Fahrzeug weggefahren ist.
MQTT-Broker
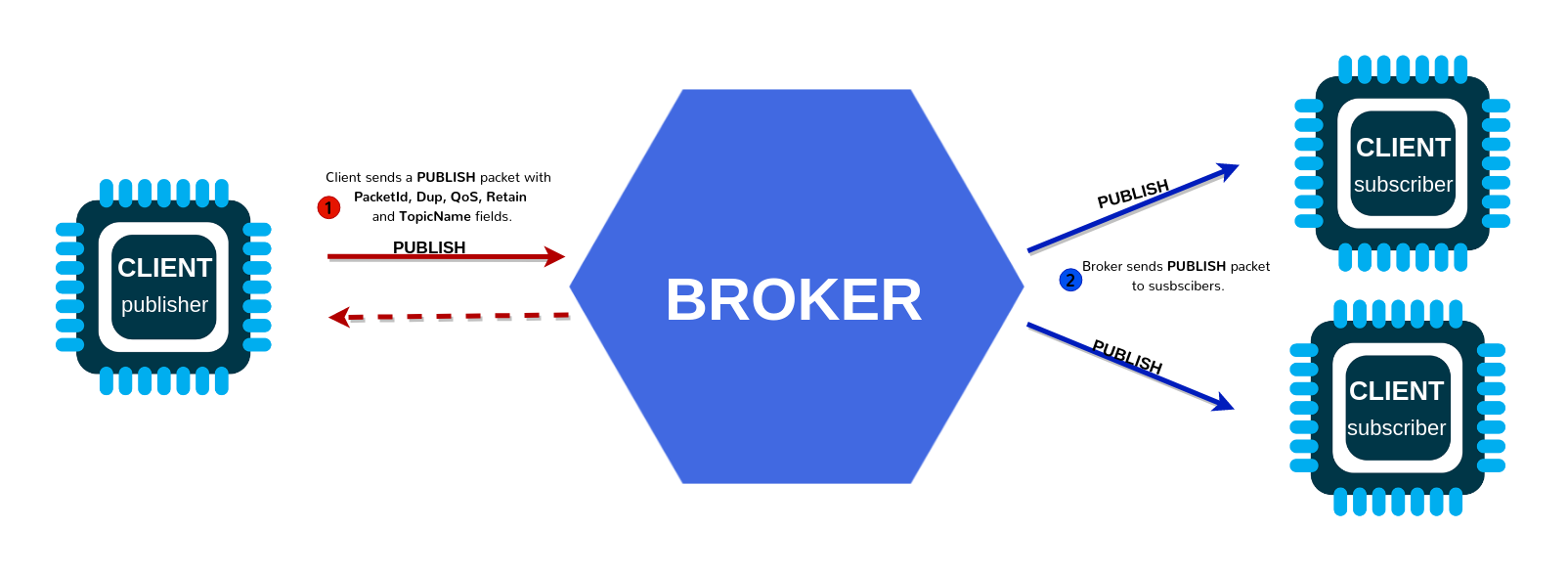
VDA5050-Befehle werden als MQTT-Nachrichten über einen MQTT-Broker übertragen. Der MQTT-Broker ist ein Server, der die Kommunikation zwischen Geräten (Clients genannt) über das MQTT-Protokoll ermöglicht. Er empfängt Nachrichten zu bestimmten Themen von Publishern und leitet sie an Subscriber weiter.
Der MQTT-Broker ist die Software-Instanz, mit der sich SOTO drahtlos verbindet, um Befehle zu empfangen. Wenn diese Verbindung unterbrochen wird, erhält SOTO keine Transportaufträge mehr. Der Status dieser Verbindung wird in der oberen Leiste der SOTO-Oberfläche auf dem Roboter angezeigt.
Lagerverwaltungssystem
Lagerverwaltungssysteme (WMS) werden in der Regel zur Verwaltung und Steuerung von Lagerprozessen eingesetzt. Das WMS verfolgt Lagerbestände, Sammeltransportaufträge, Sendungen und die Bewegung von Waren innerhalb eines Lagers. Es optimiert die Prozesse des Wareneingangs, der Lagerung, der Kommissionierung und des Versands von Waren, was zu einer verbesserten Effizienz und Genauigkeit bei der Bestandsverwaltung führt.

Das WMS ist also ein typisches Eingabesystem für den Master Controller.
Master Controller mit SOTO
SOTO ist vollständig konform mit dem VDA5050-Standard und kann daher in jedem VDA5050-kompatiblen Master Controller-Netzwerk betrieben werden. Der Master Controller ist dafür verantwortlich, den Betrieb von SOTO zu orchestrieren und die richtigen Befehle zur richtigen Zeit zu erteilen.
Alle Peripheriegeräte wie WMS, Feuermelder, Stationssensoren, Materialanforderungsterminals, Türen und ähnliche E/A-Geräte müssen an den Master Controller angeschlossen werden.
SOTO kann entweder mit dem Magazino Master Controller oder einem anderen kompatiblen Master Controller eines Drittanbieters betrieben werden.
Batching
Um den Betrieb von SOTO zu verwalten, führt der Master Controller eine entscheidende Aufgabe aus, die 'Batching' genannt wird. Dabei werden mehrere Einzelaufträge zu einer einzigen Tour zusammengefasst, wobei Faktoren wie die Priorität des Auftrags, die Kapazität des Backpacks, das Systemlayout und die Lieferreihenfolge berücksichtigt werden.
Last in first out (LIFO)
Der doppelt tiefe Backpack von SOTO erfordert eine LIFO-Lieferreihenfolge. Das bedeutet, dass der Roboter zuerst die Ladungsträger aufnehmen muss, die zuletzt geliefert werden sollen.
Aufgrund des doppelttiefen Backpacks ist diese Aufgabe recht komplex und unerlässlich, um die höchstmögliche Produktivität beim Einsatz von SOTO zu erreichen.
Flottenmanager
Wenn mehrere Roboter in der gleichen Arbeitsumgebung operieren, ist der Master Controller dafür verantwortlich, den Verkehr entsprechend zu lenken, damit die Fahrzeuge nicht blockiert werden. Dies geschieht über VDA5050-Nachrichten, die steuern, welches Fahrzeug über bestimmte Knoten und Verbindungen fahren darf.

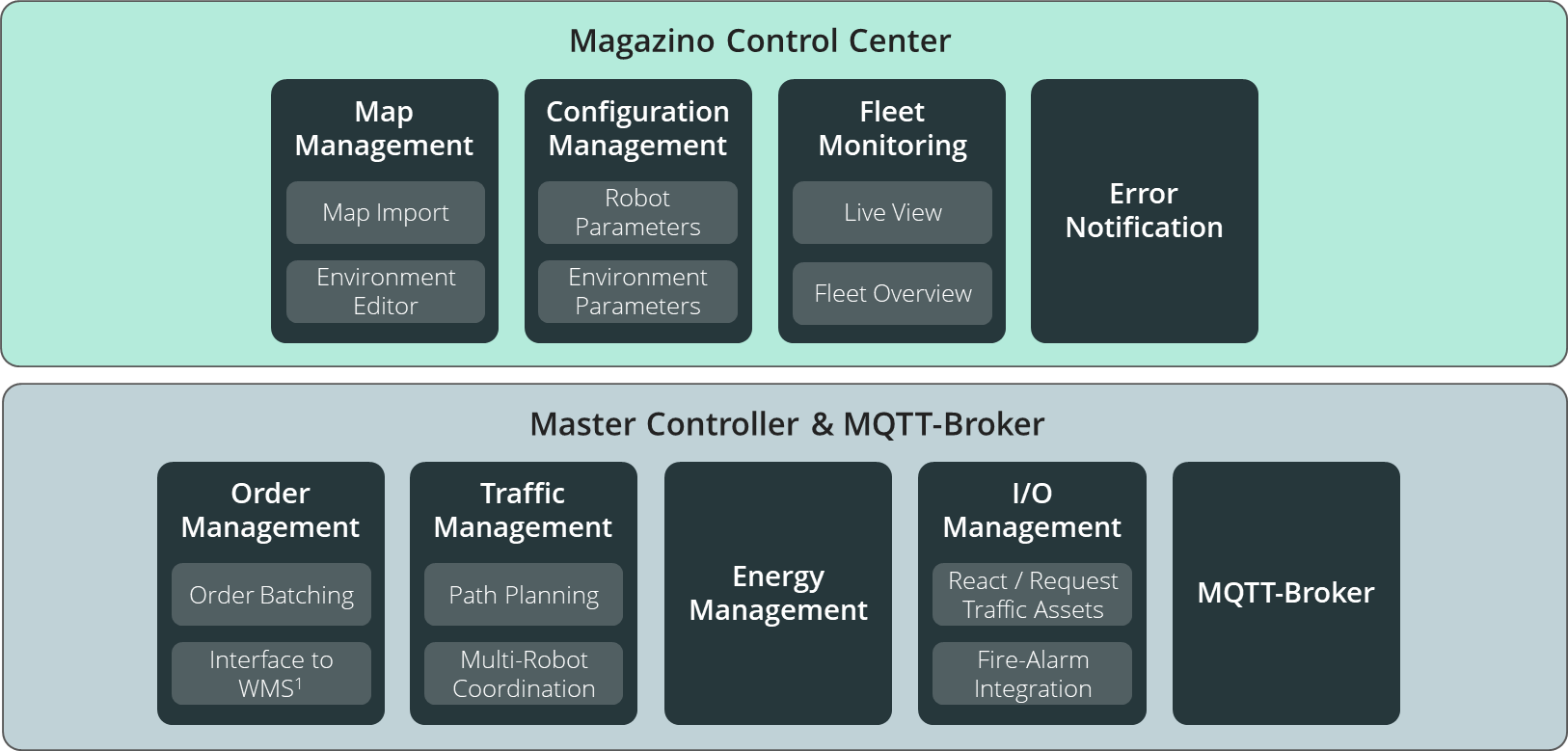
Magazino Flottenmanager
Der Magazino Fleet Manager kann für den Betrieb einer reinen SOTO-Flotte verwendet werden. Der Magazino Fleet Manager unterstützt keine Fahrzeuge anderer Anbieter.
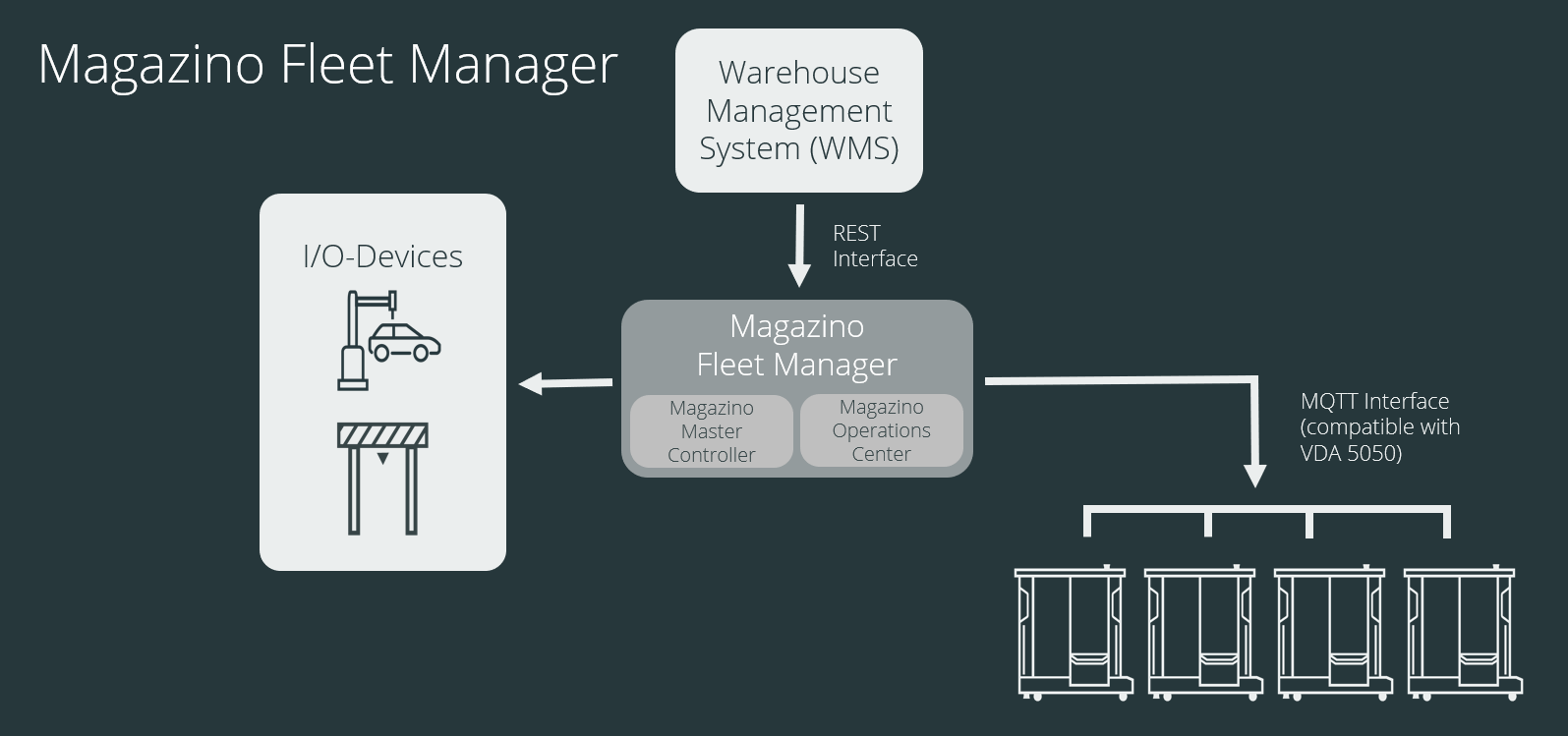
Der Magazino Fleet Manager besteht aus zwei Komponenten:
Magazino Operations Center
Das Magazino Operations Center enthält alles, was zur Einrichtung und Überwachung eines einzelnen SOTO oder einer Flotte von SOTOs erforderlich ist.Magazino Master Controller
Der Magazino Master Controller verwaltet einen einzelnen SOTO oder eine Flotte von SOTOs zur Laufzeit.
Der Magazino Fleet Manager bietet Ihnen die folgenden Funktionen:
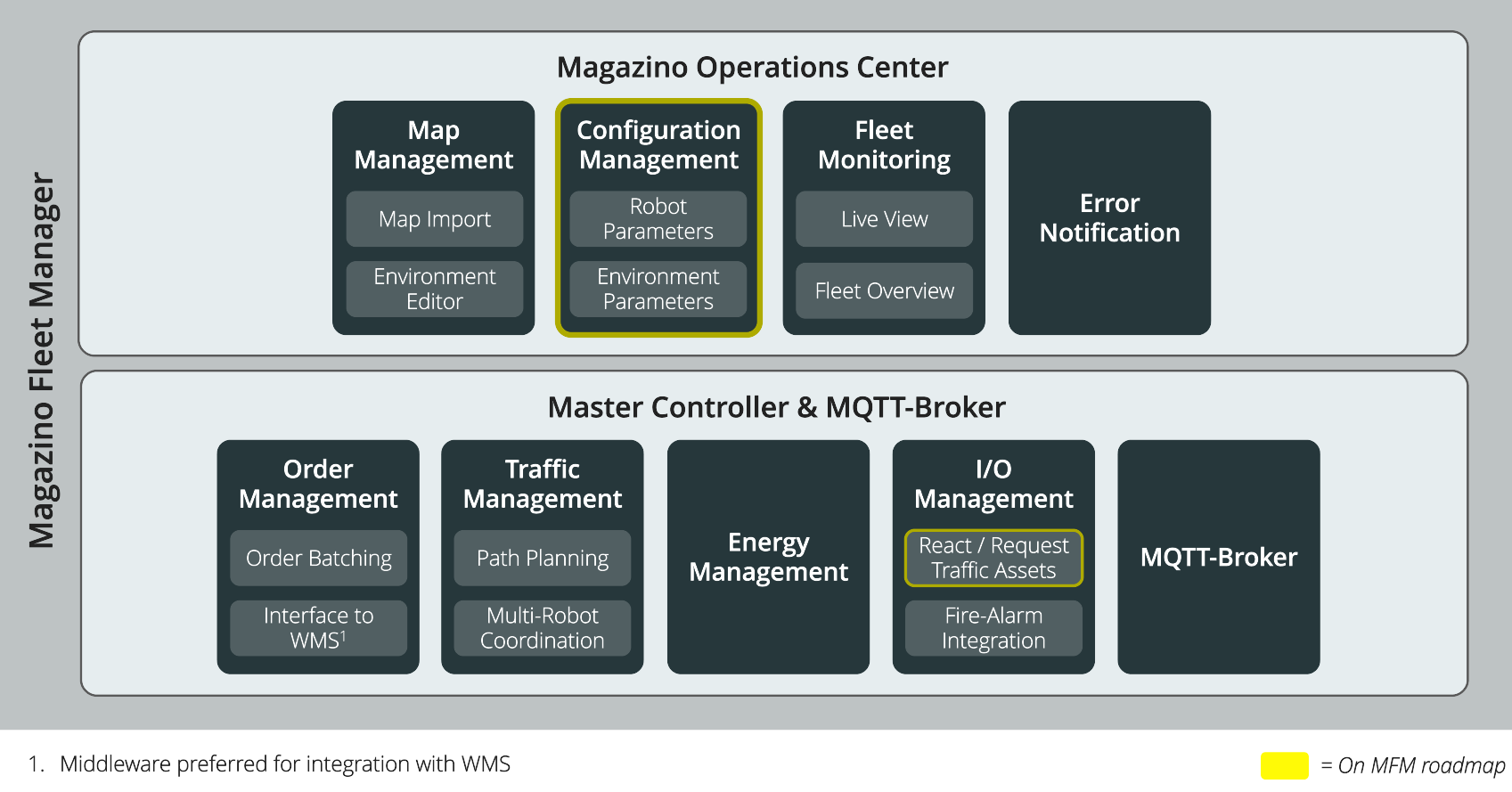
Der Magazino Fleet Manager bietet eine RestAPI-Schnittstelle für Transportaufträge.
Um andere Peripheriegeräte und Systeme anzuschließen, die nicht direkt kompatibel sind, ist eine Middleware erforderlich, zum Beispiel das Jungheinrich Logistik-Interface.
Das Jungheinrich Logistik-Interface ist eine vielseitige Kommunikationsschnittstelle, die Maschinen und Prozesse im Lager miteinander verbindet. Es ermöglicht eine einfache und effiziente Kommunikation zwischen Fahrzeugen, der Lagerausstattung und der Lagerverwaltungssoftware, wie dem Warehouse Management System oder alternativ einem übergeordneten Host-System.
Master-Controller eines Drittanbieters
Wenn Sie einen gemischten Fuhrpark betreiben, ist ein Master Controller eines Drittanbieters erforderlich. Der Master Controller eines Drittanbieters muss die folgenden Funktionen unterstützen:
VDA5050 (MQTT) Kommunikation mit SOTO
Batching-Algorithmus
Die Kommunikationsschnittstelle zu Peripheriegeräten und übergeordneten Hostsystemen hängt von den Protokollen ab, die der Master Controller unterstützt.
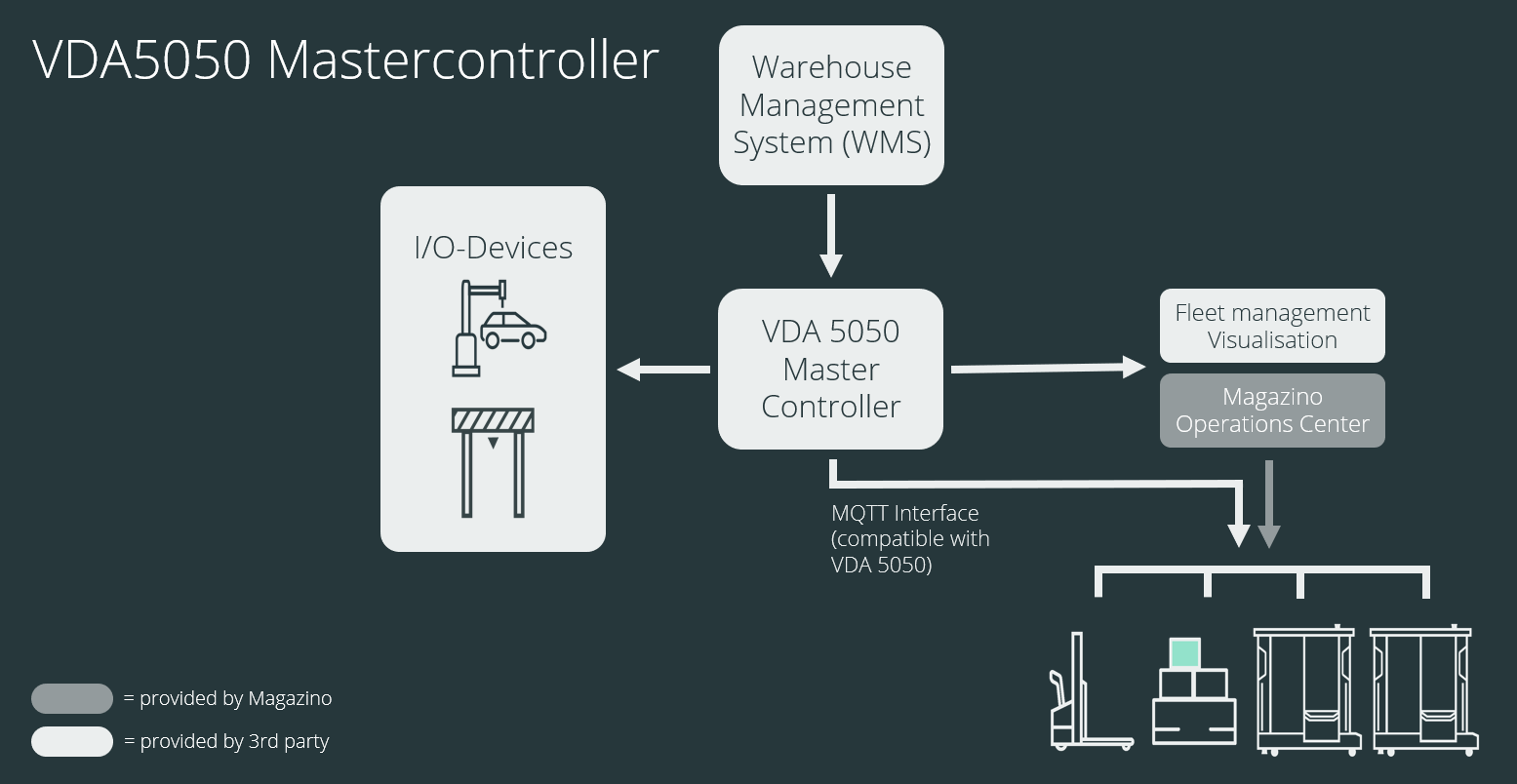
In jedem Fall muss das Magazino Operations Center verwendet werden, um ein einzelnes SOTO oder eine Flotte von SOTOs einzurichten. Das Magazino Operations Center ist daher immer in jedem SOTO-Angebot enthalten.
Bei der Verwendung eines Master Controllers eines Drittanbieters kann der Kunde keine aktuellen und vergangenen Sammeltransportaufträge im Magazino Operations Center einsehen. Dies muss von dem Drittanbieter bereitgestellt werden.